- Differentiel
-
Différentiel
 Différentiel monté sur l'axe arrière d'une automobile
Différentiel monté sur l'axe arrière d'une automobile
Un différentiel est un système mécanique qui a pour fonction de distribuer une vitesse de rotation par répartition de l'effort cinématique, de façon adaptative, immédiate et automatique, aux besoins d'un ensemble mécanique.
Par exemple, il est très utile sur un véhicule automobile où il permet aux roues motrices de tourner à des vitesses différentes lors du passage d'une courbe : les roues situées à l'extérieur du virage tournent plus vite que celle situées à l'intérieur.
Sommaire
Fonctionnement
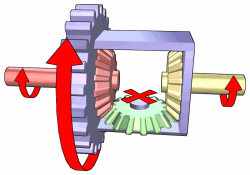
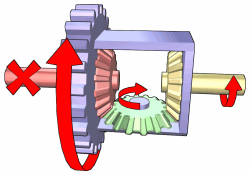
1 2 Sur ces deux images la motricité en provenance du moteur est représentée par la grande flèche rouge et s'exerce sur l'ensemble bleu qui entraine les deux arbres rouge et jaune à la même vitesse :
- Sur l'image de gauche, les deux arbres de sortie (à gauche/rouge et à droite/jaune) tournent à la même vitesse. L'effort de rotation est donc réparti équitablement et le pignon intermédiaire vert (appelé satellite) ne tourne pas.
- Sur l'image de droite, l'arbre rouge est ralenti. Le pignon intermédiaire est alors entraîné et transfère une rotation supplémentaire à l'arbre jaune qui tourne alors à une vitesse supérieure.
Le système fonctionne de manière adaptative : lorsqu'on freine « légèrement » un des deux arbres (pincement, frottement…) la vitesse de rotation de cet arbre se trouve ralentie et la vitesse de l'autre augmente d'autant.
Ce procédé présente le désavantage de transférer le couple, c'est-à-dire l'effort en rotation, dans le même sens. Dans la plupart des cas d'utilisation, il serait plutôt souhaitable d'appliquer un couple supérieur sur l'arbre opposant la plus grande résistance, par exemple lorsque l'autre roue est posée sur du verglas.
Sous sa forme la plus fréquente le différentiel est composé d'un pignon conique (solidaire de l'arbre moteur) entraînant perpendiculairement une couronne dentée conique supportant une cage de pignons satellites, ceux-ci entraînant deux pignons planétaires solidaires des arbres entraînés.
Le différentiel mécanique fut inventé en 1827 par le mécanicien français Onésiphore Pecqueur (1792-1852). Il fut employé dès 1860 sur les premiers véhicules routiers à vapeur.
Cas d'utilisation
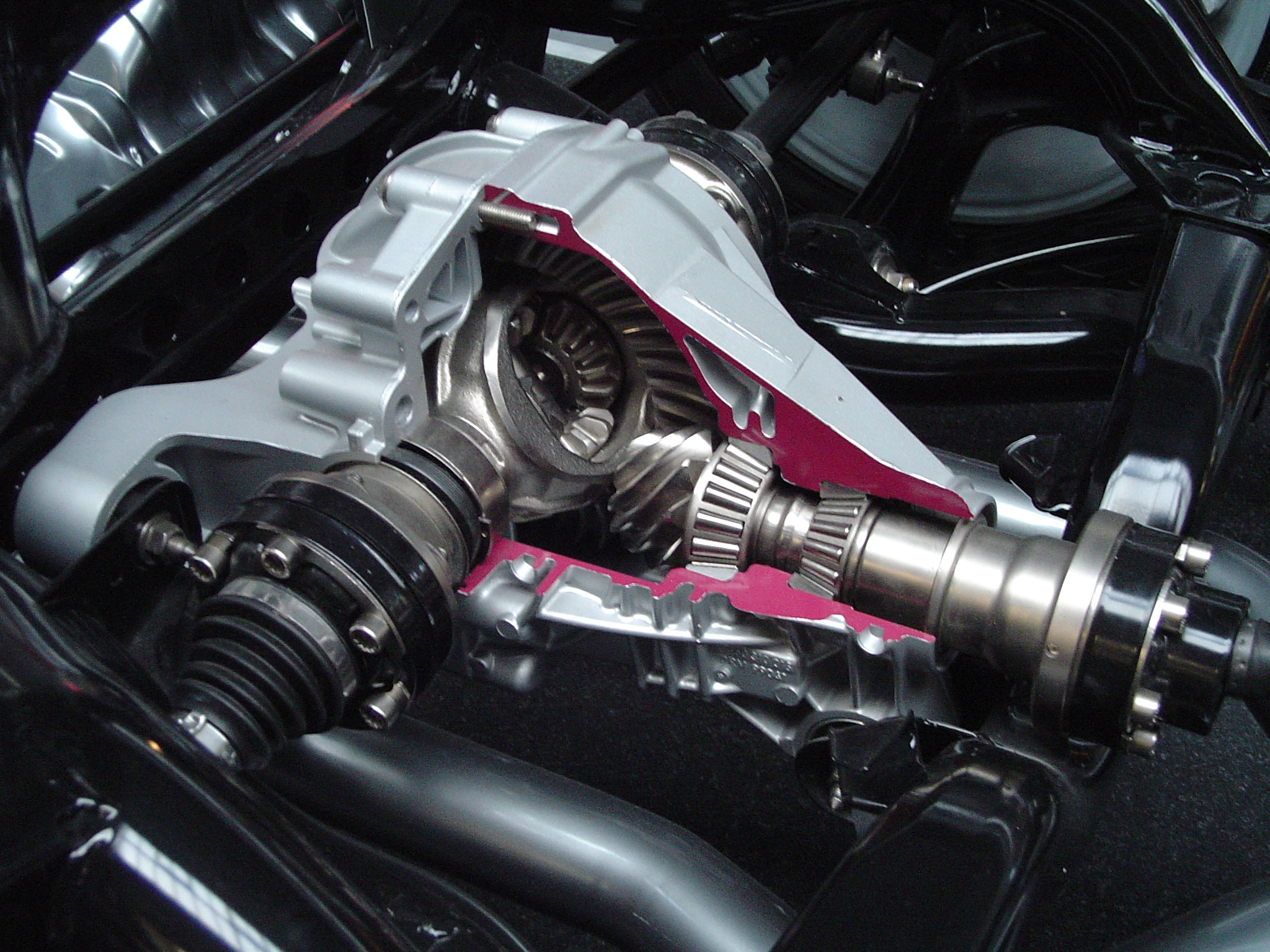
 Un différentiel (Porsche Cayenne)
Un différentiel (Porsche Cayenne)Le cas d'utilisation le plus répandu est l'entraînement d'un véhicule. Dans un virage, la roue située à l'intérieur (du côté où l'on tourne), ayant une distance plus faible à parcourir, tourne moins vite que la roue située à l'extérieur. Grâce au différentiel, la motricité est maintenue tout en autorisant la différence de vitesse entre les roues. Il assure ainsi une meilleure tenue de route (sans différentiel, un véhicule tend à aller tout droit) et permet de limiter l'usure des pneumatiques. D'autre part, un différentiel central doit être utilisé dans les véhicules à transmission intégrale permanente de manière à répartir le couple entre les essieux, qui peuvent eux aussi avoir des vitesses légèrement différentes, de la même manière qu'il le répartit dans sa position habituelle entre les roues.
Il a aussi existé des véhicules sans différentiel, choix parfois dicté par l'économie de poids : la Voisin Laboratoire de 1923, l'Isetta de 1953. Dans ces deux cas, le problème était résolu par une voie arrière très réduite. Le karting est un autre exemple de véhicule à quatre roues sans différentiel ; dans ce cas, le châssis doit être assez souple pour permettre à la roue arrière intérieure au virage de se soulever, de façon à ce que le kart puisse tourner. Les essieux sont étroits (140 cm), le défaut induit en virage est moins important que sur les automobiles ordinaires.
Une autre solution est de ne motoriser qu'une roue. Toutefois, le véhicule risque de dévier un peu, et cette solution n'est quasiment utilisée que pour les jouets.
Différentiel à glissement limité mécanique
La faiblesse du différentiel ordinaire réside dans le fait que si une roue du train moteur n’adhère pas (par exemple roue sur la neige, dans la boue), l’ensemble de la transmission du couple se fait sur cette roue, et le véhicule n'avance plus correctement, voire plus du tout. Pour résoudre ce problème, certains différentiels sont conçus pour se limiter à partir d'un certain seuil de glissement (par exemple détectant un écart de couple entre les deux demi arbres fixés aux satellites), ce sont les différentiels à glissement limité (DGL en français ou LSD en anglais).
Les véhicules tout-terrain utilisent souvent ces dispositifs car ils sont prévus pour aller dans des terrains très meubles (boue, neige, etc.). Pour les véhicules puissants qui développent en général beaucoup de couple, il peut être nécessaire d'utiliser un (ou des) DGL, en particulier en sport automobile. Dans ce cas, le véhicule peut modifier son comportement en virage, et au lieu de déraper, il conserve son adhérence mais peut modifier sensiblement la trajectoire prévisible.
Il existe plusieurs marques de différentiels à glissement limité (DGL) mécaniques. De nombreux brevets sont encore actifs, les solutions du marché comportent donc des différences notables. Parmi les modèles les plus courants, on peut citer les différentiels :
- Torsen (Gleason Works fabriquant américain de pignons et engrenages, a déposé la marque Torsen, pour « TORque SENsing », utilisant une vis sans fin, principe inventé au milieu du XXème siècle par l'ingénieur américain Vernon Gleasman),
- Quaife (fabricant anglais, soit en OEM chez Ford notamment, soit en pièce de remplacement),
- GKN Driveline (fabricant japonais de DGL et de viscocoupleurs à glissement limité).
On dit souvent que le DGL est taré à x %, pour signifier qu'il tolère un écart de couple de 100-x % entre les demi arbres. Un DGL ne force pas les demi-arbres à être solidaires en cas de patinage d'une roue motrice, ce qui serait une opération mécaniquement très contraignante (risque de casse importante).
Autres systèmes complémentaires
Il existe d'autres systèmes à glissement limité se plaçant en amont d'un différentiel. Un exemple en est le système Haldex, utilisé dans les groupes Volkswagen AG, Ford et General Motors, et qui repose sur un embrayage sophistiqué :
- le système Haldex Limited Slip Coupling de la société Haldex Traction AB, embrayage à disques multiples tournant dans un bain d'huile dont la pression est régulée électro-hydrauliquement par un système électronique.
Il permet de coupler partiellement ou totalement les essieux avant et arrière, par détection d'une différence des vitesses de rotation des arbres en amont (couplé à l'essieu avant) et en aval (essieu arrière) du dispositif. Cette architecture est performante et permet de gérer l'adhérence des quatre roues en compatibilité avec les ABS, EPS et autres systèmes électroniques. La performance essentielle du système réside dans son temps de réaction extrêmement court (une roue ne patine qu'environ un dixième de tour avant la réaction de l'embrayage), qui le rend comparable aux systèmes de transmission intégrale permanente. Ce système est aussi capable de prendre en compte, en temps réel, des paramètres subtils comme le diamètre différent de chaque roue (chaque pneu n'est jamais exactement du même diamètre, une « galette » roue de secours peut être utilisée)[réf. nécessaire].
La critique principale portée contre les systèmes du type Haldex est la consommation de puissance plus importante que dans les systèmes mécaniques sans fluide. Toutefois, contrairement aux systèmes mécaniques qui sont toujours actifs (et dissipent de ce fait toujours de la puissance), il peut ne pas être actif en condition normale et préserver un rendement moyen supérieur aux DGL.
Voir aussi
Lien externe
 Portail du génie mécanique
Portail du génie mécanique Portail de l’automobile
Portail de l’automobile
Catégories : Dispositif mécanique | Technologie automobile | Engrenage
Wikimedia Foundation. 2010.