- Équiprojectivité en physique
-
L’équiprojectivité est la propriété fondamentale des torseurs. En physique, on se limite aux champs de vecteurs dans l'espace affine ℝ3, c'est-à-dire l'espace réel muni un repère orthonormé.
Sommaire
Définition
Cas général
Si l'on considère un champ de vecteurs
 , appelés moments, alors le champ de vecteurs moment est équiprojectif si pour deux points quelconques P et Q
, appelés moments, alors le champ de vecteurs moment est équiprojectif si pour deux points quelconques P et Q .
.
Article détaillé : Champ équiprojectif.Cas du champ des vecteurs vitesse
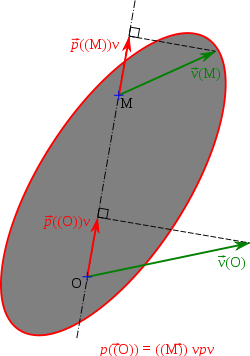 Illustration de l'équiprojectivité du champ des vecteurs vitesse.
Illustration de l'équiprojectivité du champ des vecteurs vitesse.
Considérons le champ des vecteurs vitesse des points d'un solide,
 . Si le solide est indéformable, alors les points ne s'éloignent pas ni ne se rapprochent. Donc, si l'on considère deux points O et M, le segment [OM] garde la même longueur. Il en résulte que la projection de
. Si le solide est indéformable, alors les points ne s'éloignent pas ni ne se rapprochent. Donc, si l'on considère deux points O et M, le segment [OM] garde la même longueur. Il en résulte que la projection de  et de
et de  sont identiques, soit d'après la définition du produit scalaire :
sont identiques, soit d'après la définition du produit scalaire : .
.
Le champ des vecteurs vitesse est donc équiprojectif.
Cette propriété fournit une méthode de résolution graphique en cinématique :
- si l'on connaît le vecteur vitesse d'un point O de l'objet, par exemple point en contact avec un actionneur (extrémité de tige d'un vérin, dent d'engrenage) ;
- si l'on connaît la direction
 du vecteur vitesse d'un point M de l'objet, par exemple point en contact avec un dispositif de guidage (liaison pivot, liaison glissière) ;
du vecteur vitesse d'un point M de l'objet, par exemple point en contact avec un dispositif de guidage (liaison pivot, liaison glissière) ; - alors
- on détermine la projection de sur (OM),
- on reporte ce segment en M,
- on fait la projection inverse de ce segment sur , ce qui donne .
- on détermine la projection de
La méthode est une alternative à la méthode du centre instantané de rotation.
Vecteur résultante
Si le champ
est équiprojectif, alors il existe un vecteur  appelé résultante tel que
appelé résultante tel que .
.
On voit en effet que
 est orthogonal à
est orthogonal à  , donc que ce terme s'annule lors du produit scalaire avec . Le torseur est désigné par son vecteur résultante et son champ de vecteurs , appelé quant à lui champ de vecteurs moment.
, donc que ce terme s'annule lors du produit scalaire avec . Le torseur est désigné par son vecteur résultante et son champ de vecteurs , appelé quant à lui champ de vecteurs moment.Ainsi, si l'on connaît le vecteur résultante et un vecteur moment en un point, on est capable de déterminer le vecteur moment en tout point. Ceci est utilisé en mécanique.
Cinématique
Dans le cas du champ des vecteurs vitesse
 , la résultante est le vecteur vitesse de rotation
, la résultante est le vecteur vitesse de rotation  . On a alors
. On a alors .
.
Ceci justifie la méthode de résolution graphique avec le centre instantané de rotation (CIR).
Statique
Le vecteur moment par rapport à un point P d'une force
 dont le point d'application est Q est défini par
dont le point d'application est Q est défini par .
.
On voit que le champ des vecteurs moment est un champ équiprojectif de vecteur résultante
et dont la valeur en Q est  . Cette propriété permet de définir le torseur statique.
. Cette propriété permet de définir le torseur statique.Voir aussi

Wikimedia Foundation. 2010.