- EADS Harfang
-

Harfang/Eagle One 
 Vue de l’avion
Vue de l’avionConstructeur  EADS/
EADS/  IAI
IAIRôle Drone MALE Premier vol 2 septembre 2006 Mise en service juin 2008 Motorisation Moteur Rotax 914 F Nombre 1 Type moteur à combustion interne turbocompressé Puissance unitaire 115 ch Dimensions 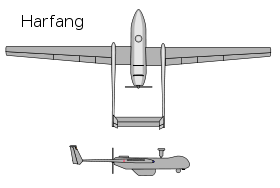
Envergure 16,6 m Longueur 9,30 m Masses À vide 657 kg Carburant 250 kg Maximale 1 250 kg Performances Vitesse maximale 207 km/h Plafond 7 620 m Rayon d’action 1 000 km Avionique Capteurs optroniques
Capteur radar de détection de cibles mobiles (SAR/MTI)
Liaison de données à vue directe (LOS) et par satellite (Satcom)
Télémètre-désignateur lasermodifier 
Le Harfang[1] (anciennement Système intérimaire de drone MALE ou SIDM) est un système de drone destiné à équiper l'Armée de l'air française en remplacement du Hunter. Le Harfang, aussi nommé Eagle One, est une réalisation d’EADS et d’IAI. Son nom est inspiré du harfang, une chouette des neiges.
Sommaire
Conception
L'origine du projet remonte à 1995 avec l'achat par l'armée de l'air des drones RQ-5 Hunter (en) qui ont permis d'acquérir de l'expérience dans le domaine de l'emploi des drones. Le drone est basé sur l'appareil israélien IAI Heron conçu au début des années 90 et qui fut présenté au salon du Bourget en 1999. Le programme SIDM ou Eagle One débuta vraiment en 2001 et le premier vol d'un appareil eut lieu sur la base aérienne 125 Istres-Le Tubé, le 9 septembre 2006. S'en suivit une campagne d'essais menée par le Centre d'essais en vol visant à tester les capacités du drone, étape nécessaire avant son transfert au CEAM sur la base aérienne 118 Mont-de-Marsan.
À l'origine, le drone aurait dû être livré à l'armée de l'air à l'été 2003 pour remplacer les drones Hunter (par ailleurs retirés du service en septembre 2004). Cependant des problèmes industriels rencontrés par le constructeur ont considérablement retardé la livraison des appareils. L'un des principaux problèmes était la non-coïncidence des capacités de l'appareil avec le cahier des charges fourni par l'armée notamment au niveau du système de transmission par satellite fourni par EADS. Le drone est ainsi passé d'un produit pris sur « étagère » à un produit spécifique à l'armée de l'air. Le véhicule aérien et son calculateur de bord sont construits par la société Malat, une division de la société IAI (Israel Aircraft Industries) et basé sur le drone existant HERON de cette même société. L'armée de l'air a commandé un système composé de trois appareils aériens dotés de nombreux capteurs et d'une autonomie de plus de 20 h, et de deux stations de contrôle au sol. Une liaison satellitaire permet de contrôler l'appareil à grande distance et ses différents équipements permettront aussi bien la surveillance d'un territoire que la désignation d'objectifs grâce à un désignateur laser ou pourra aussi servir de relais de communication au profit des forces au sol.
Le SIDM est entré en service en juin 2008 au sein de l'escadron d'expérimentation de drones 1/330 « Adour » à Mont de Marsan (Landes) ; cette unité dépendait du Centre des expérimentations militaires (CEAM) et dépend aujourd'hui du Commandement des Forces aériennes. Elle a été re-baptisée Escadron de drones 1/33 "Belfort" depuis septembre 2010. L'expérimentation s'est déroulée en 2008-2009 et a suivi 4 phases. Dans un premier temps, il était prévu de familiariser l'escadron avec la plate-forme puis de familiariser les opérateurs avec les capteurs, ensuite de diffuser le renseignement C4ISR et enfin transférer les flux d'information aux forces terrestres[2]. Comme son nom l'indique le SIDM est un programme « intérimaire » dans l'attente d'un programme aux capacités supérieures.
L'un des principaux manques de l'appareil tient en l'absence de capteurs électromagnétiques et sa faible capacité à évoluer à cause de sa capacité d'emport et de sa génération électrique. Son principal défaut est sa vitesse de 80 nœuds seulement qui peut se montrer pénalisant lors des phases de transit. Le SIDM se montre limité dans des conditions météorologiques perturbées ou dans des conditions givrantes et humides[3].
Le 4 mars 2010, le Harfang doté du système « Rover » permettant le retransmission en temps réel sur le terrain de ses images, a effectué sur premier vol au dessus de l'Afghanistan[4].
Description
Le système intérimaire de drone MALE est composé de deux segments distincts : le drone lui-même et l'ensemble de commande et de contrôle au sol.
Le drone est constitué d'un véhicule aérien composé d'un fuselage propulsé par un moteur (Rotax) à hélice propulsive situé à l'arrière et doté d'une voilure en position haute équipée de volets et d'un système de dégivrage. L'équilibre longitudinal de l'appareil est assuré par un empennage bi-poutre prenant appui sur la voilure principale. D'une masse au décollage de 1,2 tonne et d'une envergure de 16,6 m, le SIDM peut emporter une charge de mission de 250 kg à 7 500 m et pendant une durée de 24 heures. La charge de mission est constituée d'une boule tri-senseurs (IAI) assez mal gyrostabilisée montée sous l'avant du fuselage, comportant les capteurs électro-optique et infrarouge ainsi que le désignateur laser, et d'un radar à synthèse d'ouverture (Elta) et à suppression d'échos fixes (SAR/MTI) à très haute résolution permettant de relever une image électronique du terrain et d'observer les mouvements de véhicules au sol quelles que soient les conditions météorologiques ; l'antenne de ce radar est montée dans un radôme ventral situé au centre du fuselage. Outre ces capteurs le drone emporte aussi une centrale de navigation inertielle (Sagem) recalée par GPS ainsi qu'un GPS différentiel apportant une capacité de décollage et d'atterrissage automatique (ATOL : Automatic take off and landing). De plus, l'appareil est programmé, en cas de perte de la liaison de commande et de contrôle, pour suivre une trajectoire lui permettant de revenir à son point de départ tout en essayant de rétablir la transmission.
L'ensemble de commande et de contrôle au sol est composé de quatre modules projetable sur théâtre extérieur. Le premier baptisé M1 est destiné à la préparation des missions et est basé sur un module de préparation expérimental de missions de Mirage 2000. Le second, M2, est la station de commande et de contrôle proprement dite puisqu'elle permet à l'opérateur de diriger l'appareil notamment lors des phases de décollage et d'atterrissage, puisqu'une fois en vol l'appareil suit une trajectoire programmée ou non; à tout moment cependant, l'opérateur peut reprendre la commande. Le station M3, elle, reçoit en temps réel les informations des capteurs à bord du drone, celles-ci étant transmises par l'intermédiaire de la liaison satellite. Enfin la station M4 est destinée à l'interprétation et à la diffusion des informations obtenues par le drone.
En ce qui concerne la transmission de données, le SIDM est équipé d'une liaison directe (LOS : Line of sight) permettant la commande et le contrôle de l'appareil jusqu'à une portée de 150 à 200 km grâce à une antenne montée au-dessus du fuselage, et d'une liaison satellitaire à haut débit (Satcom) permettant de s'affranchir de l'horizon radioélectrique. Les données sont envoyées vers un satellite géostationnaire grâce à une antenne directionnelle (InSnec) pointée par des vérins et installée dans un satdôme à l'avant du drone. Enfin, l'appareil est doté d'un relais de communication (VHF/UHF) (Rohde & Schwarz) permettant de transmettre des informations à un centre de commandement de troupes au sol et de s'intégrer dans le trafic aérien militaire. Le véhicule aérien est également équipé d'un IFF et d'un enregistreur de vol.
Le système SIDM permet la surveillance ininterrompue d'un théâtre d'opérations par une transmission continue des informations et la mise en œuvre d'une procédure (handshake) de transferts des données entre les véhicules aériens lors d'un passage de relais entre drones (entrant et partant).
Versions
- Eagle 0 : prototype qui effectua son premier vol en 1998.
- Eagle 1 : première version de production qui effectua son premier vol le 2 juin 2003 en Israël.
- Eagle MPR : projet d'une version de surveillance maritime de l'Eagle 1 équipée d'un radar maritime.
- Eagle 2 : projet d'une version plus grande turbopropulsée par un moteur PT6 Pratt & Whitney.
Utilisateurs
 France :
France :
- Armée de l'air : quatre appareils et deux stations au sol
-
- Escadron de drones 1/33 Belfort depuis 2009 sur la Base aérienne 709 Cognac-Châteaubernard
Immatriculations
- Appareil N° 1021[5] - immatriculation F-SDAU - visible sur plusieurs photos[6],[7].
- Appareil N° 1022 - immatriculation F-SDAY
- Appareil N° 1023 - immatriculation F-SDAZ[8].
- Appareil N° 1024 - immatriculation F-SDAT (visible sur la photo de l'article)
Engagements
 Le drone Harfang basé à Sigonella en août 2011.
Le drone Harfang basé à Sigonella en août 2011.
- Le 14 et 15 septembre 2008, ils servirent à la surveillance lors de la visite du pape Benoît XVI à Lourdes[9].
- En février 2009, un contingent de l'Armée de l'air des forces françaises en Afghanistan aux ordres du Lieutenant-colonel Cyril Carcy[10] déploie ses 3 SIDM en Afghanistan, à Bagram, au nord de Kaboul[11]. L'un d'eux a dû être rapatrié en France suite à un problème de comportement en vol ayant pu endommager la structure suite à un oubli de programmation au sol du dégivrage[12].
Les travaux d'expertises réalisés par le DGA, EADS et le SIAe ne permettent pas de déterminer de manière certaine les causes du problème. L'origine humaine n'est pas encore retenue à ce stade de l'enquête et le BEA-D n'aurait pas encore ouvert d'enquête. Selon EADS, l'hypothèse de bugs dans le logiciel de commande de vol n'est pas à exclure[13]. En un an de service, ils ont effectué 185 vols pour 166 missions opérationnelles représentant 1 700 h de vol[14] - L'Escadron d'expérimentation drones EED 1/330 « Adour » comprenant 56 personnes sera affecté au plus tard au troisième trimestre 2009 à la base aérienne 709 Cognac-Châteaubernard[15].
- Son utilisation serait planifiée pour la surveillance du Sommet du G8 2011 en mai 2011[16].
- Engagement d'un appareil depuis la base aérienne de Sigonella à partir du 24 août 2011 au dessus de la Libye lors de l'opération Harmattan[17].
Sources
- Ltt Céline Limousin, « Ce que les drones vont changer : Le SIDM pourquoi il séduit ! », dans Air Actualités, no 607, janvier 2008, p. 22-31 (ISSN 00022152)
- Ltt Céline Limousin, « Ce que les drones vont changer : Les secrets du drone », dans Air Actualités, no 607, janvier 2008, p. 32-33 (ISSN 00022152)
- Ltt Céline Limousin, « Ce que les drones vont changer : La préparation du futur drone », dans Air Actualités, no 607, janvier 2008, p. 38 (ISSN 00022152)
- Jane's Handbook
Voir aussi
Notes et références
- http://www.defense.gouv.fr/air/base/focus/2009/1er_trimestre/harfang_operationnel_en_afghanistan
- (fr)Erreur dans la syntaxe du modèle ArticleVéronique Sartini, « Le SIDM, enfin ! », dans Technologie et Armement, no 12, p. 49-52 (ISSN 1953-5953)
- (fr)Henri-Pierre Grolleau, « CEAM Toujours à la point! », dans Air Fan, no 364, mars 2009, p. 20-34 (ISSN 0223-0038)
- Daniel Favre, « Premier vol du Harfang avec le Rover », info aviation, 8 mars 2010. Consulté le 8 mars 2010
- (fr) diaporama photo, lepoint.fr, 29 mars 2009] 29 mars 2009
- (fr) photo n° 10 du diaporama photo, lepoint.fr, 29 mars 2009
- (en) Bagram Airfield photos, Bagram Airfield official site, US Air Force, photos prises le 11 juillet 2009
- marquage qui a déjà été porté par un avion du CEAM qui s'est écrasé le 15 juin 1956 : (fr) Stèle du LCL Arthur de la Taille-Tretinville, aerosteles.hydroretro.net
- Jean Guisnel, « REPORTAGE - Dans le secret des drones de l'armée de l'air » sur lepoint.fr - Défense ouverte, Le Point, 18 avril 2009. Consulté le 24 avril 2009
- (en) French unmanned aircraft protect Bagram Airmen, coalition forces, US Air Force, 13 juillet 2009
- (fr) Jean-Dominique Merchet, « Premier vol du drone SIDM en Afghanistan » sur secretdefense.blogs.liberation.fr, Libération, 18 février 2009. Consulté le 19 février 2009
- Jean Guisnel, « Le drone Harfang a été victime d'une erreur humaine » sur lepoint.fr - Défense ouverte, Le Point, 24 avril 2009. Consulté le 24 avril 2009
- Jean-Marc Tanguy, « Le Harfang disséqué dans les Landes », 24 avril 2009. Consulté le 24 avril 2009
- Air et Cosmos n° 2205, p. 6
- Jean-Marc Tanguy, « REPORTAGE - Dans le secret des drones de l'armée de l'air », 14 avril 2009. Consulté le 24 avril 2009
- Jean-Dominique Merchet, « Un drone Harfang surveillera le prochain sommet du G8 de Deauville », 19 avril 2011. Consulté le 19 avril 2011
- Libye : point de situation n°40, Ministère de la Défense et des anciens combattants, 25 août 2011. Consulté le 26 août 2011



Wikimedia Foundation. 2010.