- Équation d'euler-lagrange
-
Équation d'Euler-Lagrange
L’équation d'Euler-Lagrange est un résultat mathématique qui joue un rôle fondamental dans le calcul des variations. On retrouve cette équation dans de nombreux problèmes réels de minimisation de longueur d'arc, tel que le problème brachistochrone ou bien encore les problèmes géodésiques. Elle est nommée d'après Leonhard Euler et Joseph-Louis Lagrange.
Sommaire
Notations
Ici, f désigne une fonction d'un ouvert de R3 à valeurs dans R, et x une fonction d'intervalle de R contentant t0 et t1 dans R. Les fonctions x et f sont deux fois différentiables. La variable utilisée pour x est notée t. Si l'on note α, β et γ les trois variables de f, (e1, e2, e3) la base canonique de R3 et (dα, dβ, dγ) la base duale de la base canonique, on obtient.

L'application différentielle Df associe à un vecteur de R3 une application linéaire de R3 dans R, c'est à dire un élément du dual de R3. On identifie souvent R3 et son dual à l'aide du produit scalaire canonique. La différentielle est alors équivalent au gradient :

Ici, la fonction f est appliquée au triplet (t, x(t), x'(t)). Comme la fonction x(t) est une fonction d'une unique variable, t, sa dérivée x'(t) est bien à valeur dans R. Pour indiquer que cette dérivée s'applique à une fonction de la variable t, on note sa dérivée à l'aide d'un point, surmontant la lettre x et, au lieu d'utiliser les symboles α, β et γ, peu parlant, on les remplace par les suivants :

Une dérivée partielle de f est une fonction de R3 dans R. Si elle est composée avec la fonction de R dans R3, qui à t associe le triplet (t, x(t), x'(t)), on obtient une fonction de R dans R, dérivable, ce qui permet de donner un sens à la fonction de R dans R suivante :

Enoncés
Premier énoncé
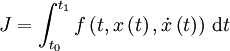
Enoncé — Soit J la fonctionnelle définie par, pour toute fonction x :
Une condition nécessaire pour que J soit stationnaire est que l'on ait :
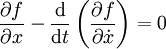 .
.
Autres formulations
La fonction x peut être considérée comme à valeurs dans un espace euclidien E. La fonction f est alors définie sur un ouvert de RxE2. La dérivée partielle de f par rapport à la deuxième variable notée par abus x, est une application du dual de E, qui s'identifie avec E, il en est de même avec la troisième dérivée partielle. L'équation suivante se lit alors un peu différemment, elle correspond à la somme de deux vecteurs de E qui s'annule.
Un cas particulier fréquent est celui où la fonction f est définie sur E2, ce qui revient à dire que l'expression de f est indépendante de t, l'équation d'Euler-Lagrange prend la forme suivante, appelée identité de Beltrami :
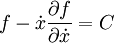
La deuxième différentielle partielle de f est ici identifiée à son gradient, c'est à dire à un vecteur de E. La lettre C désigne une constante réelle.
Pour s'en rendre compte, dérivons l'identité de Beltrami :

Exemples
Un exemple historique célèbre est la courbe brachistochrone. La question posée revient à trouver la courbe reliant un point A à un point B, situé à une altitude plus faible, tel qu'un point matériel partant du point A sans vitesse initiale et glissant sans frottement sur la courbe rejoigne le plus rapidement possible le point B.
L'exemple choisi ici est extrait de l'article sur le principe de Fermat. L'objectif est de déterminer un chemin optique plan, dont les coordonnées sont notées horizontalement t et verticalement x, pour respecter les notations de l'énoncé du théorème. Le rayon lumineux traverse le vide, à l'exception de la zone correspondant aux valeurs de x situées entre -1 et 1. Sur cette bande, l'indice nt n'est plus égal à 1 mais à 1/|x|. Entre les deux bandes, le chemin optique est d'une longueur L égale à :

L'équation d'Euler-Lagrange stipule que la dérivée partielle de f par rapport à la troisième variable est une constante, notée ici C, si elle est appliquée aux variables t, x et sa dérivée. On obtient :

Ce résultat s'écrit encore, si u = Ct:
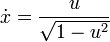
On reconnait l'équation d'une portion de cercle.
Démonstration
Il s'agit d'une très célèbre démonstration en mathématiques.[réf. nécessaire] Elle repose sur le lemme fondamental du calcul des variations.
Nous cherchons une fonction x rendant extrémale la fonctionnelle et satisfaisant les conditions aux bords :
 et
et .
.
On a ainsi :
Supposons que les dérivées premières de f soient continues.
Si x rend extrémale J, alors une perturbation infinitésimale de x préservera les conditions aux bords et augmentera J (si x est un minimum) ou diminuera J (si x est un maximum).
Soit
 une perturbation de x, où
une perturbation de x, où  est une fonction différentiable vérifiant
est une fonction différentiable vérifiant  . Définissons :
. Définissons :Calculons alors la dérivée de J par rapport à ε. Pour cela on note g désigne la fonction, qui à (t, ε) associe f(t, xε, dxε/dt ) :
Le développement du calcul donne, si
Donc :
Que la fonctionnelle J soit stationnaire en x signifie que J'(0) = 0, soit encore :
Par intégration par parties :
Avec les conditions aux bords η(t0) = η(t1) = 0, on a :
En appliquant le lemme fondamental du calcul des variations avec η(t0) = η(t1) = 0, on obtient :
 Portail des mathématiques
Portail des mathématiques
Catégories : Calcul des variations | Équation différentielle | Équation aux dérivées partielles






![0 = \int_{t_0}^{t_1} { \eta\left(t\right) \frac{\partial f}{\partial x} \, \mathrm dt} + \left[ \eta\left(t\right) \frac{\partial f}{\partial \dot x} \right]_{t_0}^{t_1} - \int_{t_0}^{t_1} { \eta\left(t\right) \frac{\mathrm d}{\mathrm dt} \frac{\partial f}{\partial \dot x} \, \mathrm dt} = \int_{t_0}^{t_1} {\left( \frac{\partial f}{\partial x} - \frac{\mathrm d}{\mathrm dt} \frac{\partial f}{\partial \dot x} \right) \eta\left(t\right) \, \mathrm dt} + \left[ \eta\left(t\right) \frac{\partial f}{\partial \dot x} \right]_{t_0}^{t_1}](/pictures/frwiki/55/7f27cbd4a86698682f4b56af1c3e562b.png)

Wikimedia Foundation. 2010.