- Transformée en z
-
Transformée en Z
La transformée en Z est un outil mathématique de traitement du signal, qui est l'équivalent discret de la transformée de Laplace.
Elle est utilisée entre autres pour le calcul de filtres numériques à réponse impulsionnelle infinie et en automatique pour modéliser des systèmes dynamiques de manière discrète.
La transformée de Fourier discrète est un cas particulier de la transformée en Z.
Sommaire
Définition
Sa définition mathématique est la suivante : la transformation en Z est une application qui transforme une suite s (définie sur les entiers) en une fonction S d'une variable complexe nommée z, telle que
La variable n représente en général le temps discrétisé, la variable complexe z ne représente rien de particulier, il s'agit d'une création purement abstraite. Lorsqu'on travaille sur s(n) on dit que l'on est dans le domaine temporel, lorsqu'on travaille sur S(z) le domaine est appelé fréquentiel par analogie avec la transformée de Fourier, mais strictement parlant on est dans un domaine parfaitement abstrait.
Si
 , on parle de signal causal. Inversement, si
, on parle de signal causal. Inversement, si 0,\ s(n)=0" style="max-width : 98%; height: auto; width: auto;" src="/pictures/frwiki/55/72c4fab084e0bec2ecf70edb9080c45f.png" border="0">, on parle de signal anti-causal.
Existence de la transformée en Z
Le domaine de convergence est le sous-ensemble de
 dans lequel la série converge.
dans lequel la série converge.
Autrement dit, le domaine de convergence de la transformée en z de la suite est l'ensemble :
est l'ensemble :On l'appelle également couronne de convergence. En effet, en posant
 , il vient :
, il vient :Donc S(z) existe si xn a une croissance au plus exponentielle, auquel cas le domaine de convergence est compris dans une couronne :
- - de petit rayon le majorant de la base du côté des n négatifs
- - de grand rayon le majorant de la base du côté des n positifs
Dans toute la suite de l'article, les transformées en Z ne seront valables que dans ce domaine de convergence sans que cela soit reprécisé.
Propriétés de la transformée en Z
Linéarité
La transformée en Z d'une combinaison linéaire de deux signaux est la combinaison linéaire des transformées en Z de chaque signal.
Décalage temporel
Le décalage temporel d'un signal de k échantillons se traduit par la multiplication de la transformée en Z du signal par z−k.
Convolution
La transformée en Z d'un produit de convolution est le produit des transformées en Z
Multiplication par une exponentielle
Multiplication par la variable d'évolution
De façon générale :
où
 signifie que l'on applique k fois à
signifie que l'on applique k fois à  l'opérateur
l'opérateur 
Si l'on écrit cette formule au rang k=1, on obtient la formule de dérivation :
Théorème de la valeur initiale
Soit
 un signal causal et
un signal causal et  sa transformée en Z. Alors :
sa transformée en Z. Alors :Théorème de la valeur finale
Soit
un signal causal et sa transformée en Z. Alors lorsque la limite existe, on peut écrire :Transformée en Z inverse
La transformée en Z inverse est donné par :
où C est un chemin fermé parcouru dans le sens inverse des aiguilles d'une montre et appartenant entièrement au domaine de convergence.
En pratique, ce calcul s'effectue souvent à l'aide du théorème des résidus et la formule devient dans le cas d'un signal causal :
Autres méthodes d'inversionD'autres méthodes d'inversion pour passer de X(z) à x(n) sont: la lecture à l'envers de la table des transformées usuelles; l'application des règles de décalage, de combinaisons linéaires, de produit de convolution. En désespoir de cause, on peut toujours essayer de procéder par identification en donnant à z k+1 valeurs numériques et en recherchant les coefficients x(0) à x(k) qui sont solutions d'un système de k+1 équations linéaires à k+1 inconnues. Ou bien essayer de trouver un développement de Taylor ou Maclaurin de la fonction à inverser. Un cas particulier favorable se présente lorsque la fonction X(z) est une fraction rationnelle. En effet lorsque :
 , P et Q étant deux polynômes en 1/z, on peut effectuer la division jusqu'au degré de précision souhaité, et l'on obtient directement les valeurs numériques des coefficients x(n), n variant de 0 à m. En l'occurrence on adopte plutôt dans ce cas la notation
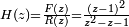
, P et Q étant deux polynômes en 1/z, on peut effectuer la division jusqu'au degré de précision souhaité, et l'on obtient directement les valeurs numériques des coefficients x(n), n variant de 0 à m. En l'occurrence on adopte plutôt dans ce cas la notation  . La raison en est que, pour les systèmes discrets ou échantillonnés, la fonction de transfert s'écrit h(n) et sa transformée en Z se présente souvent sous cette forme de quotient entre une sortie (en z) et une entrée (en z): . Un exemple concret pour illustrer cette démarche:Quotient de polynômes en z, approximation numérique.
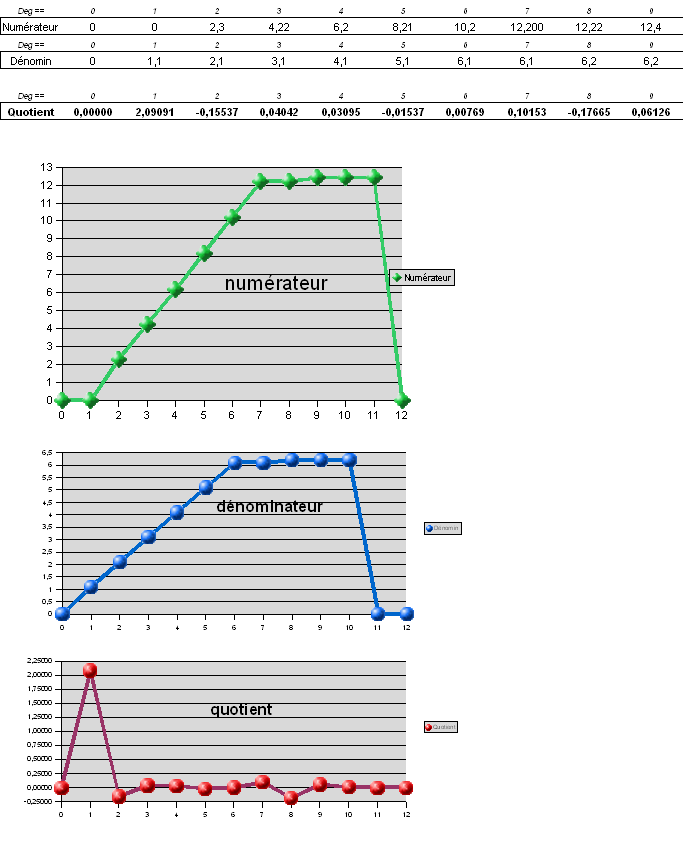
. La raison en est que, pour les systèmes discrets ou échantillonnés, la fonction de transfert s'écrit h(n) et sa transformée en Z se présente souvent sous cette forme de quotient entre une sortie (en z) et une entrée (en z): . Un exemple concret pour illustrer cette démarche:Quotient de polynômes en z, approximation numérique.Attention, cette méthode est purement numérique, elle ne fournit pas l'expression analytique de la série inverse. Dans cet exemple, H(z) est le rapport de deux polynômes en 1/z. Le numérateur ressemble à la multiplication par 2 du dénominateur décalé de 1 période, mais on choisit des valeurs numériques un peu inexactes pour éviter un parfait quotient égal à 2/z. Le numérateur, de puissance 11, est une expression de la forme :
-

-
NUM(z) = 0 + 0(1 / z)1 + 2,3 * (1 / z)2 + 4,22 * (1 / z)3 + 6,2 * (1 / z)4 + 8,21 * (1 / z)5 + 10,2 * (1 / z)6 + 12,2 * (1 / z)7 + 12,22 * (1 / z)8 + 12,4 * (1 / z)9 + 12,4 * (1 / z)10 + 12,4 * (1 / z)11
Le dénominateur, de puissance 10, est:-
DENOM(z) = 0 + 1,1 * (1 / z)1 + 2,1 * (1 / z)2 + 3,1 * (1 / z)3 + 4,1 * (1 / z)4 + 5,1 * (1 / z)5 + 6,1 * (1 / z)6 + 6,1 * (1 / z)7 + 6,2 * (1 / z)8 + 6,2 * (1 / z)9 + 6,2 * (1 / z)10
Ici la division des polynômes ne "tombe pas juste", nous nous contentons d'une approximation du quotient Q(z), de la forme
- jusqu'à la puissance 10 :
-
Q(z) = 0 + 2,090909 * (1 / z)1 − 0,155372 * (1 / z)2 + 0,040421 * (1 / z)3 + 0,0309047 * (1 / z)4 − 0,015368 * (1 / z)5 + 0,007694 * (1 / z)6 + 0,101526 * (1 / z)7 − 0,176646 * (1 / z)8 + 0,061258 * (1 / z)9 + 0,015904 * (1 / z)10
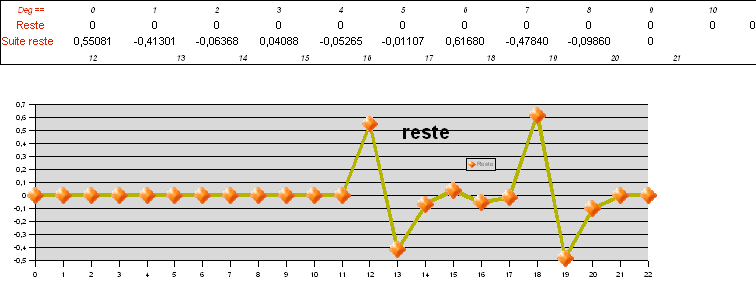
Le reste R(z) de cette division incomplète est:
-
R(z) = 0 + 0 * (1 / z)1 + 0 * (1 / z)2 + 0 * (1 / z)3 + 0 * (1 / z)4 + 0 * (1 / z)5 + 0 * (1 / z)6 + 0 * (1 / z)7 + 0 * (1 / z)8 + 0 * (1 / z)9 + 0 * (1 / z)10 + 0 * (1 / z)11 + 0,550806 * (1 / z)12 − 0,413006 * (1 / z)13 − 0,063683 * (1 / z)14 + 0,040876 * (1 / z)15 − 0,052647 * (1 / z)16 − 0,011071 * (1 / z)17 + 0,616793 * (1 / z)18 − 0,478404 * (1 / z)19 − 0,098602(1 / z)20
On peut vérifier sur un tableur (du commerce ou open-source) ou à la main que ces polynômes répondent bien à la définition de la division euclidienne: H(z) = NUM(z)/DENOM(z)= Q(z)+ R(z)/DENOM(z). On suppose que le reste est négligeable par rapport aux coefficients du quotient. Les schémas de ces divers polynômes peuvent être visualisés sur un tableur comme suit.
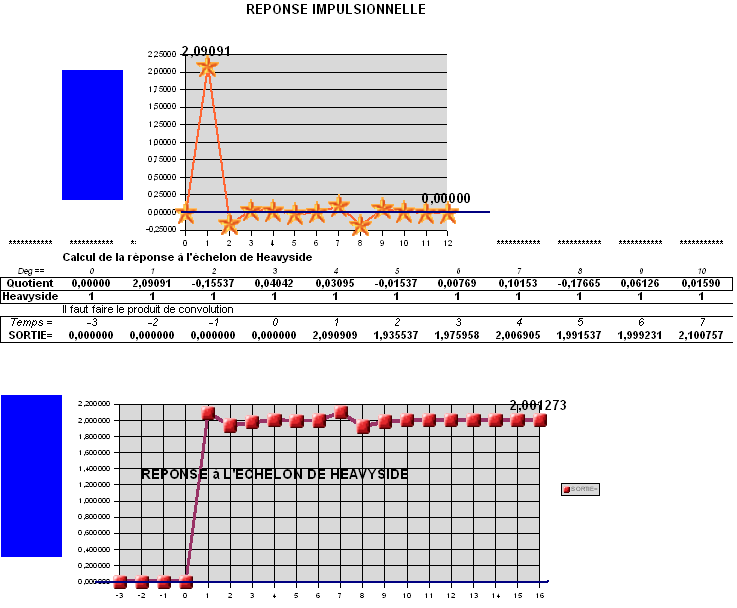
Par curiosité on peut afficher la réponse impulsionnelle de l'approximation Q(z) de H(z). De même on peut afficher la réponse indicielle de Q(z) à un échelon de Heavyside.Si nous nous contentions d'une approximation moins précise de H(z) par le quotient Q(z), de la forme
- jusqu'à la puissance 5 par exemple :
-

Procédé par identification approximative des coeffs de X(z).Pour passer de X(z) à x(n) , si aucune méthode ne semble déboucher, en désespoir de cause on peut toujours essayer de procéder par identification en donnant à z k+1 valeurs numériques et en recherchant les coefficients x(0) à x(k) qui sont solutions d'un système de k+1 équations linéaires à k+1 inconnues. Exemple:
Utilisation des fractions rationnelles, exemple de la fonction de transfert de la Suite de Fibonacci.La Suite de Fibonacci peut être vue comme une suite f(n)= 0, 1 , 1, 2, 3, 5, 8, 13 etc. qui dépend donc de la suite "rampe" r(n)= 0, 1 ,2 ,3 , 4 etc. Ces deux suites peuvent faire l'objet de calculs utilisant l'outil de la transformée en Z. Nous établirons d'abord deux identités remarquables issues de considérations banales. Premièrement, la suite "rampe unitaire", r, qui n'est rien d'autre que la suite des entiers naturels, r0 = 0,r1 = 1,r2 = 2, 3, 4 , 5 , 6 etc est telle qu'un nombre est égal à la moyenne entre son précédent et son suivant, soit
- 0 1 2 3 4 5 6 7 8 9
- 0-0-2-4-6 -8 -10 -12 etc
- 0+0+0 1 2 3 4 5 etc
sauf au début avec 0 et 1, tous les termes de cette combinaison ont un résultat nul.
- rn − 1 + 2rn + rn + 1 = 0
à partir d'un certain rang, ce qui implique la multiplication suivante de polynômes en 1/z, le premier étant le trinôme (1 -2 1):
Deuxièmement, la suite de Fibonacci est par définition fn = fn − 1 + fn − 2, à partir d'un certain rang, ce qui s'illustre ainsi
- 0 1 1 2 3 5 8 13 etc
- - 0-1-1-2-3-5-8 etc
- ----0-1-1-2-3-5-8 etc
Sauf au début avec 0 et 1, tous les termes de cette combinaison ont un résultat nul et ceci implique la multiplication suivante de polynômes en 1/z, le premier étant le trinôme (1,-1,-1):
De ces deux multiplications nous pouvons déduire l'égalité de deux fractions
Fraction qui est égale finalement à
Cette formule que l'on peut exprimer en termes de transformée en Z n'est autre que celle de la fonction de transfert entre la rampe et la suite de Fibonacci.
Comme la transformée R de la rampe fait partie des formules usuelles (
 ), ceci nous donne :
), ceci nous donne :Après simplifications nous voici dès lors en possession d'une formule simple de la transformée en Z de la suite de Fibonacci :
Nous pourrions nous en contenter, mais si l'on souhaite obtenir une formule analytique de la suite de Fibonacci , f(n), il faut procéder à la transformation inverse. La méthode des fractions rationnelles peut être tentée. Le dénominateur possède deux pôles, z0 et z1 qui sont le nombre d'or :
 et l'opposé de la section dorée :
et l'opposé de la section dorée : . Pour les calculs rencontrés ci-dessous on se servira des propriétés suivantes de z0 et z1 :
. Pour les calculs rencontrés ci-dessous on se servira des propriétés suivantes de z0 et z1 :  , et :
, et :  . La fonction se décompose en fractions rationnelles élémentaires que l'on réécrit un peu:
. La fonction se décompose en fractions rationnelles élémentaires que l'on réécrit un peu: .
.
Une fraction du type 1 / (z − z0) peut se travailler ainsi:
La première partie étant la transformée de la formule usuelle exponentielle ,
 , la seconde partie 1/z étant le retard pur d'un cran. Si bien que la transformée inverse de cette fraction élémentaire est
, la seconde partie 1/z étant le retard pur d'un cran. Si bien que la transformée inverse de cette fraction élémentaire est  , en appliquant les règles de combinaisons linéaire nous calculons la suite cherchée :
, en appliquant les règles de combinaisons linéaire nous calculons la suite cherchée : .
.
Relation avec les autres transformées
Transformée de Laplace
La transformée en Z est simplement la transformée de Laplace d'un signal discret en effectuant la substitution :
où
 est la période d'échantillonnage (en unité de temps i.e. secondes) et
est la période d'échantillonnage (en unité de temps i.e. secondes) et  est la fréquence d'échantillonnage (en échantillon par seconde ou hertz)
est la fréquence d'échantillonnage (en échantillon par seconde ou hertz)Pour démontrer cela, posons :
qui est un peigne de Dirac et
qui est la représentation en temps continu du signal
 échantillonné et où
échantillonné et où ![x[n] \equiv x(nT) \](/pictures/frwiki/101/e60ade99e7866e049533684bdb27cd6c.png) sont les échantillons de .
sont les échantillons de .La transformée de Laplace du signal échantillonné
 est :
est :Le passage du symbole d'intégration à l'intérieur de la série est difficile à justifier si le résultat final n'est pas convergent.
Ce qui est précisément la définition de la transformée en Z d'un signal discret
![x[n] \](/pictures/frwiki/99/c1466b9927640af95f78274058d272d9.png)
avec la substitution
 .
.En comparant les deux dernières équations, nous trouvons la relation entre la transformée en Z et la transformée de Laplace d'un signal discret :
 .
.
Transformée de Fourier discrète
La transformée en Z est la généralisation de la Transformée de Fourier discrète (TFD). La TFD peut être trouvé en évaluant X(z) en z = eiω ou, en d'autres termes, en l'évaluant sur le cercle unité.
 .
.
Transformées en Z usuelles
![\delta[n] \,](/pictures/frwiki/50/2b63622fadf95b2200b264909054224f.png) représente l'impulsion de Dirac et
représente l'impulsion de Dirac et ![u[n] \,](/pictures/frwiki/55/7016daf9693a54fbb365146aa38d73c6.png) la fonction de Heaviside appelée aussi échelon unitaire, step en anglais.
la fonction de Heaviside appelée aussi échelon unitaire, step en anglais.Signal x(n) Transformée en Z X(z) Domaine de convergence 1 

2 
1\," style="max-width : 98%; height: auto; width: auto;" src="/pictures/frwiki/98/b3e5447ee5136c29e096f5d260c3a830.png" border="0">
3 ![a^n u[n] \,](/pictures/frwiki/53/52005e1c22b667a92f6a7f8763d198aa.png)

a|\," style="max-width : 98%; height: auto; width: auto;" src="/pictures/frwiki/50/2a693d4762bb2c8e1e4e11d6aa5ddce7.png" border="0">
4 ![n a^n u[n] \,](/pictures/frwiki/97/a5ee7e0b460ced4724323abe028b7d5f.png)

a|\," style="max-width : 98%; height: auto; width: auto;" src="/pictures/frwiki/50/2a693d4762bb2c8e1e4e11d6aa5ddce7.png" border="0">
5 ![-a^n u[-n-1] \,](/pictures/frwiki/53/5b1d6d741e4466bd975e49b8a7502a06.png)

6 ![-n a^n u[-n-1] \,](/pictures/frwiki/53/5422993372c0c804ccdc7c6d3f62c7b0.png)
7 ![\cos(\omega_0 n) u[n] \,](/pictures/frwiki/51/30b8b109ae04918ed2a36caf3b07f7cc.png)
1\," style="max-width : 98%; height: auto; width: auto;" src="/pictures/frwiki/98/b3e5447ee5136c29e096f5d260c3a830.png" border="0">
8 ![\sin(\omega_0 n) u[n] \,](/pictures/frwiki/57/927045b65faa4d6a90a7653bc31e335d.png)
1\," style="max-width : 98%; height: auto; width: auto;" src="/pictures/frwiki/98/b3e5447ee5136c29e096f5d260c3a830.png" border="0">
9 ![a^n \cos(\omega_0 n) u[n] \,](/pictures/frwiki/52/4289c7e1488082d84f8b71c22d4393bd.png)
a|\," style="max-width : 98%; height: auto; width: auto;" src="/pictures/frwiki/50/2a693d4762bb2c8e1e4e11d6aa5ddce7.png" border="0">
10 ![a^n \sin(\omega_0 n) u[n] \,](/pictures/frwiki/97/abc790ab6176f8964b9bdb8563c63bdc.png)
a|\," style="max-width : 98%; height: auto; width: auto;" src="/pictures/frwiki/50/2a693d4762bb2c8e1e4e11d6aa5ddce7.png" border="0">
Lien interne
 Portail des mathématiques
Portail des mathématiques
Catégories : Transformée | Transformée du signal | Analyse complexe -

















![\begin{align} x_q(t) &\equiv x(t) q(t) = x(t) \sum_{n=-\infty}^{\infty} \delta(t - n T) \\
& = \sum_{n=-\infty}^{\infty} x(n T) \delta(t - n T) = \sum_{n=-\infty}^{\infty} x[n] \delta(t - n T) \end{align}](/pictures/frwiki/54/6d59a31f6d82894e7e54a23b32738e5b.png)
![\begin{align}X_q(s) &= \int_{0^-}^{\infty} x_q(t) e^{-p t} \, \mathrm dt \\
&= \int_{0^-}^{\infty} \sum_{n=-\infty}^{\infty} x[n] \delta(t - n T) e^{-p t} \, \mathrm dt \end{align}](/pictures/frwiki/52/4ee1dc355ac74f523e8ce922e01d512e.png)
![\begin{align}X_q(s) &= \sum_{n=-\infty}^{\infty} x[n] \int_{0^-}^{\infty} \delta(t - n T) e^{-p t} \, \mathrm dt \\
&= \sum_{n=-\infty}^{\infty} x[n] e^{-n p T} \end{align}](/pictures/frwiki/101/ebbcf880fbc6d019fefe96bb08e88c9e.png)
![X(z) = \sum_{n=-\infty}^{\infty} x[n] z^{-n}](/pictures/frwiki/100/dace15f436215165c9a2854116a23068.png)
Wikimedia Foundation. 2010.