- Théorie des plaques
-
 Pour les articles homonymes, voir Plaque.
Pour les articles homonymes, voir Plaque.La théorie des plaques est une théorie permettant de calculer les déformations et les contraintes dans une plaque soumise à des charges. Elle s'inspire de la théorie des poutres.
Sommaire
Historique
En 1888, Love utilise les hypothèses de Gustav Kirchhoff, elles-mêmes inspirées des hypothèses d'Euler-Bernoulli pour les poutres, pour fonder une théorie des plaques minces[1].
La théorie des plaques épaisses a été consolidée par Mindlin (en)[2] à partir des travaux de Rayleigh (1877), Timoshenko (1921), Reissner (1945) et Uflyand (1948)
Démarche
 Démarche pour l'étude des plaques
Démarche pour l'étude des plaques
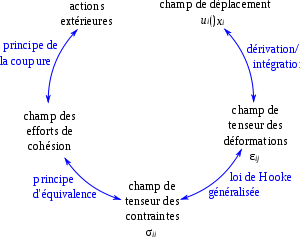
Comme pour l'étude des poutres, on met en relation
- la forme finale de la plaque, c'est-à-dire le champ des déplacements, avec le champ de tenseur des déformations ;
- les efforts de cohésion avec les efforts extérieurs ;
- les efforts de cohésion avec le tenseur des contraintes, grâce au principe d'équivalence ;
- et le tenseur des contraintes avec le tenseur des déformations, grâce à la loi de Hooke généralisée.
Le modèle de poutre permet de passer des efforts de cohésion au tenseur des contraintes ; il permet d'appliquer le principe d'équivalence.
Définitions et hypothèses
Une plaque est un solide délimitée par deux plans parallèles, les faces, et un cylindre au sens large (de section quelconque et pas nécessairement circulaire) dont l'axe est perpendiculaire aux faces. On définit :
- le plan moyen, ou plan médian : plan situé à équidistance entre les faces (c'est l'équivalent de la courbe moyenne des poutres) ;
- le feuillet neutre : élément de matière d'épaisseur infinitésimale situé autour du plan moyen (c'est l'équivalent de la fibre neutre des poutres) ; c'est le plan (O, x, y), d'équation z = 0 ;
- une fibre normale : ensemble des points situés sur une normale au plan médian, à un endroit (x, y) donné ; elle a pour direction z.
On appelle h l'épaisseur de la plaque ; le plan inférieur est donc le plan z = -h/2 et le plan supérieur est le plan z = h/2.
On se place dans le cas d'un matériau continu, élastique, homogène et isotrope.
Si, au repos, les faces ne sont pas planes, on parle de coque plutôt que de plaque.
On sépare l'étude en deux parties : pour l'étude de la flexion, on considère que les charges sont perpendiculaires aux faces, donc que les forces sont de la forme
et que les couples sont de la forme
 .
.
Pour les charges situées dans le plan des faces, on parle de voile ou de membrane.
Théorie des plaques minces
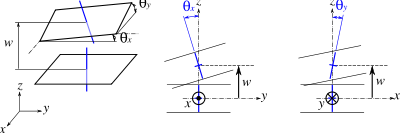
 Déformation d'une plaque mince (contour gris) avec mise en évidence du déplacement d'un élément de matière (contour noir), de son feuillet moyen (rouge) et de sa fibre normale (bleue)
Déformation d'une plaque mince (contour gris) avec mise en évidence du déplacement d'un élément de matière (contour noir), de son feuillet moyen (rouge) et de sa fibre normale (bleue)La théorie des plaques minces, ou théorie de Love-Kirchhoff, suppose que
- le plan moyen (équivalent de la courbe moyenne des poutres) est initialement plan ;
- le feuillet moyen (équivalent de la fibre neutre des poutres) ne subit pas de déformation dans son plan ; on ne considère que le déplacement transversal w des points du feuillet moyen ;
- modèle de Kirchhoff : les sections normales au feuillet moyen restent normales lors de la déformation ; en conséquence, on peut négliger le cisaillement ;
- l'épaisseur est faible ; en conséquence, les contraintes dans le sens de l'épaisseur sont supposées nulles ;
- on reste en petites déformations.
Déplacement
 Déplacement du feuillet moyen (gauche) et d'une fibre normale (droite)
Déplacement du feuillet moyen (gauche) et d'une fibre normale (droite)Soit un point M(x, y, z) de la plaque au repos. À l'instant t, sa position est M’, et l'on définit le vecteur déplacement
 .
.
Pour une plaque à un instant donné, les déplacements sur les axes u, v et w sont fonction du point M, donc de ses coordonnées (x, y, z), et de l'instant t.
Par hypothèse, les déplacement verticaux sont les mêmes pour tous les points d'une même fibre normale, on a donc :
- w(x, y, z, t) = w(x, y, t).
La fibre normale en (x, y) tourne d'un angle θx autour de l'axe x et d'un angle θy autour de l'axe y. Comme on est en petite déformation, l'arc de cercle décrit par un point lors de la rotation de la fibre normale est assimilable à un segment de droite, et l'on a :
- u(x, y, z, t) ≃ z·θy(x, y, t) ;
- v(x, y, z, t) ≃ -z·θx(x, y, t) ;
ou encore
Démonstration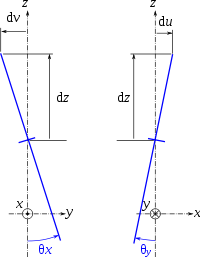 Relation entre θx, θy, u et v
Relation entre θx, θy, u et vD'après la trigonométrie, on a
le signe - vient du fait que l'axe x pointe vers le lecteur, le sens positif est donc le sens antihoraire, ce qui correspond à un déplacement v négatif lorsque z est positif. Et comme on est en petites déformations, θx ≪ 1 donc tan θx ≃ θx.
On a la même chose pour θy et u ; le signe + vient du fait que l'axe y pointe à l'opposé du lecteur, le sens positif est donc le sens horaire.
Les angles θx et θy représentant aussi la pente que prend le feuillet moyen, on a donc également :
Déformation
D'après la définition du tenseur des déformations, on a :
soit le tenseur
On retrouve bien que les cissions ε13 et ε23 sont négligeables, et comme pour les poutres, la déformation varie de manière linéaire selon z : une face est en tension et l'autre est en compression.
Si l'on définit le vecteur des courbures
on a alors
 .
.
On peut définir de manière plus générale le tenseur de courbure
![\mathrm{K} =
\begin{pmatrix}
\frac{\partial \theta_y}{\partial x} &
\frac{1}{2} \left ( \frac{\partial \theta_y}{\partial y} - \frac{\partial \theta_x}{\partial x} \right ) \\ [1ex]
\frac{1}{2} \left ( \frac{\partial \theta_y}{\partial y} - \frac{\partial \theta_x}{\partial x} \right ) &
- \frac{\partial \theta_x}{\partial y}
\end{pmatrix}
= \begin{pmatrix}
- \frac{\partial^2 w}{\partial x^2} &
- \frac{\partial^2 w}{\partial x \partial y} \\ [1ex]
- \frac{\partial^2 w}{\partial y \partial x} &
- \frac{\partial^2 w}{\partial y^2}
\end{pmatrix}
= \begin{pmatrix}
- \gamma_x & - \gamma_{xy} \\ [1ex]
- \gamma_{yx} & - \gamma_y
\end{pmatrix}](6/ac603c432668e429ac3c56c38afb68bc.png) .
.
Le tenseur des déformations sans les termes en z s'écrit donc :
 .
.
Cette écriture met en évidence la linéarité de la déformation en z.
Champ des vitesses
La détermination du champ des vitesses permet d'utiliser les puissances virtuelles en statique (il s'agit alors de vitesses virtuelles), et de résoudre les problèmes de dynamique.
On considère qu'une fibre normale se comporte comme un solide indéformable. On peut donc en chaque point déterminer le torseur cinématique :
Sur le feuillet moyen (w = 0), on a :
- vx = vy = 0
soit
Les valeurs de vx et de vy à une altitude z quelconque se détermine en transportant le torseur, ou bien en écrivant
 et
et 
Efforts de cohésion et principe d'équivalence
Dans le cas des poutres, on peut définir les efforts de cohésion pour une section complète. Dans le cas des plaques, il faut considérer deux sections perpendiculaires d'un petit élément de matière ; les efforts intérieurs sont donc définis « par mètre ». On peut établir une relation entre le tenseur des contraintes et les efforts de cohésion (principe d'équivalence).
Moments fléchissants
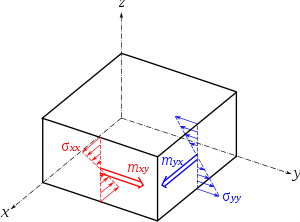 Moments fléchissants et contraintes normales
Moments fléchissants et contraintes normalesOn peut définir deux moments fléchissants :
- le moment fléchissant autour de l'axe y, qui s'exerce donc sur la face normale à x ; il se traduit par une répartition linéaire de la contrainte normale σxx :
 ;
;
- le moment fléchissant autour de l'axe x, qui s'exerce donc sur la face normale à y ; il se traduit par une répartition linéaire de la contrainte normale σyy :
 .
.
Ils s'expriment en N (Nm/m).
Moments de torsion
 Moments de torsion et cission
Moments de torsion et cissionOn peut définir deux moments de torsion :
- le moment de torsion autour de l'axe y, qui s'exerce donc sur la face normale à y ; il se traduit par une répartition linéaire de la contrainte de cisaillement τyx :
 ;
;
- le moment de torsion autour de l'axe x, qui s'exerce donc sur la face normale à x ; il se traduit par une répartition linéaire de la contrainte de cisaillement τxy :
 .
.
Ils s'expriment également en N (Nm/m).
Efforts tranchants
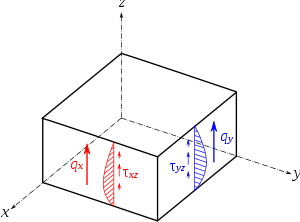 Efforts tranchants et cission
Efforts tranchants et cissionOn peut définir deux efforts tranchants :
- l'effort tranchant sur la face normale à y ; il se traduit par une répartition linéaire de la contrainte de cisaillement τyz :
 ;
;
- l'effort tranchant sur la face normale à x ; il se traduit par une répartition linéaire de la contrainte de cisaillement τxz :
 .
.
Ils s'expriment N/m, et sont négligés dans le cas des plaques minces.
Dynamique
Cette théorie permet de déterminer la propagation des ondes dans les plaques, ainsi que l'étude des ondes stationnaires et des modes vibratoires. Les illustrations ci-dessous montrent quelques modes vibratoires d'une peau de tambour (plaque circulaire).
-
mode k = 0, p = 1
-
mode k = 0, p = 2
-
mode k = 1, p = 2
Déformation de membrane
Théorie des plaques épaisses
Dans la théorie des plaques épaisses, ou théorie de Reissner et Mindlin, la fibre normale reste toujours rectiligne, mais n'est plus nécessairement perpendiculaire au plan moyen. Si θx et θy désignent les angles que fait la fibre normale avec l'axe z, ils ne correspondent plus à l'inclinaison du plan moyen, on a donc
Concernant le champ de déformation, les termes gardent leur forme générale
et par ailleurs, ε13 et ε23 ne sont plus nuls :
![\left \{
\begin{array}{l}
\varepsilon_{13} = \frac{1}{2} \left ( \frac{\partial u}{\partial z} + \frac{\partial w}{\partial x} \right ) = \frac{1}{2} \left ( \theta_y + \frac{\partial w}{\partial x} \right ) \\ [1ex]
\varepsilon_{23} = \frac{1}{2} \left ( \frac{\partial v}{\partial z} + \frac{\partial w}{\partial y} \right ) = \frac{1}{2} \left ( -\theta_x + \frac{\partial w}{\partial y} \right ) \\
\end{array}
\right .](8/d7809040b38f7ad473aca1abc8b6dc11.png) ,
,
On ne peut donc plus négliger le cisaillement.
Les vecteur et tenseur des courbures ne peuvent plus se simplifier et restent :
![\mathrm{K} =
\begin{pmatrix}
\frac{\partial \theta_y}{\partial x} &
\frac{1}{2} \left ( \frac{\partial \theta_y}{\partial y} - \frac{\partial \theta_x}{\partial x} \right ) \\ [1ex]
\frac{1}{2} \left ( \frac{\partial \theta_y}{\partial y} - \frac{\partial \theta_x}{\partial x} \right ) &
-\frac{\partial \theta_x}{\partial y}
\end{pmatrix}](a/bdade852a6d28706edc528c6a0a68467.png) ,
,
et l'on a toujours
- et : .
Notes
- A. E. H. Love, On the small free vibrations and deformations of elastic shells, Philosophical trans. of the Royal Society (London), 1888, Vol. série A, N° 17 p. 491–549.
- R. D. Mindlin, Influence of rotatory inertia and shear on flexural motions of isotropic, elastic plates, Journal of Applied Mechanics, 1951, Vol. 18 p. 31–38.
Voir aussi
Liens externes
- Cours des Mines de Paris (licence Creative Commons)
- Flexion de la bande homogène isotrope à bords libres et du rectangle à deux bords parallèles appuyés, Jean Leray (1963-1964) (téléchargeable en PDF et DjVu)
- [PDF] Cours de l'EPFL, P. Lestuzzi
- Théorie des plaques élastiques, M. François, Librecours.org
- Vibrations de flexion de plaques, L. Jaouen, Université de Sherbrooke
- Théorie des plaques élastiques, département Architecture, géologie, environnement & constructions de l'Université de Liège
- Calcul statique linéaire pour coques, Guide de validation des progiciels de calcul de structure, ICAB
- application au génie civil et à la construction :
- application à l'acoustique :
- [PDF] Entendre la forme d’un tambour, Laboratoire de physique des solides d'Orsay, Images de la physique éd. CNRS
- (en) [PDF] Study of a dome shaped PVDF loudspeaker, application à la membrane d'un haut-parleur, Université du Maine




![\begin{matrix}
\frac{\partial u}{\partial z} = \theta_y \text{ ;}\\ [1ex]
\frac{\partial v}{\partial z} = -\theta_x \text{.}\\
\end{matrix}](1/fb140fe42eda9c3a711b1f0bf9902cac.png)


![\begin{matrix}
\theta_x = \frac{\partial w}{\partial y} \text{ ;}\\ [1ex]
\theta_y = -\frac{\partial w}{\partial x} \text{.}\\
\end{matrix}](1/071f815cbb7574a9159daab8675917f4.png)
![\left \{
\begin{array}{l}
\varepsilon_{11} = \frac{\partial u}{\partial x} = z \cdot \frac{\partial \theta_y}{\partial x} =
-z \cdot \frac{\partial^2 w}{\partial x^2} \\ [1ex]
\varepsilon_{22} = \frac{\partial v}{\partial y} = -z \cdot \frac{\partial \theta_x}{\partial y} =
-z \cdot \frac{\partial^2 w}{\partial y^2} \\ [1ex]
\varepsilon_{33} = \frac{\partial w}{\partial z} = 0 \\ [1ex]
\varepsilon_{12} = \frac{1}{2} \left ( \frac{\partial u}{\partial y} + \frac{\partial v}{\partial x} \right ) =
\frac{z}{2} \left ( \frac{\partial \theta_y}{\partial y} - \frac{\partial \theta_x}{\partial x} \right ) =
-z \frac{\partial^2 w}{\partial x \partial y} \\ [1ex]
\varepsilon_{13} = \frac{1}{2} \left ( \frac{\partial u}{\partial z} + \frac{\partial w}{\partial x} \right ) = \frac{1}{2} ( \theta_y - \theta_y ) = 0 \\ [1ex]
\varepsilon_{23} = \frac{1}{2} \left ( \frac{\partial v}{\partial z} + \frac{\partial w}{\partial y} \right ) = \frac{1}{2} ( -\theta_x + \theta_x ) = 0 \\
\end{array}
\right .](b/43b06da8b9eb322e8b46fa5394de45b8.png)
![[\varepsilon] = \begin{pmatrix}
-z \cdot \frac{\partial^2 w}{\partial x^2} & -z \frac{\partial^2 w}{\partial x \partial y} & 0 \\
-z \frac{\partial^2 w}{\partial x \partial y} & -z \cdot \frac{\partial^2 w}{\partial y^2} & 0 \\
0 & 0 & 0 \\
\end{pmatrix}](6/716c9331403f40d58a0b58243f2e68c5.png)
![\vec{\chi} = \begin{pmatrix}
\frac{\partial \theta_y}{\partial x} \\ [1ex]
-\frac{\partial \theta_x}{\partial y} \\ [1ex]
\frac{1}{2} \left ( \frac{\partial \theta_y}{\partial y} - \frac{\partial \theta_x}{\partial x} \right )
\end{pmatrix}
= \begin{pmatrix}
-\frac{\partial^2 w}{\partial x^2} \\ [1ex]
-\frac{\partial^2 w}{\partial y^2} \\ [1ex]
-\frac{\partial^2 w}{\partial x \partial y}
\end{pmatrix}
= \begin{pmatrix}
-\gamma_x \\ [1ex]
-\gamma_y \\ [1ex]
-\gamma_{xy}
\end{pmatrix}](8/0a846af9d7aee6e0a8012841f1d53175.png)
![\left \{ \begin{matrix}
\omega_x = \frac{\partial \theta_x}{\partial t} = \frac{\partial^2 w}{\partial y \partial t} \\ [1ex]
\omega_y = \frac{\partial \theta_y}{\partial t} = -\frac{\partial^2 w}{\partial x \partial t} \\ [1ex]
\omega_z = 0 & \text{ (pas de torsion dans le plan)} \\
v_z = \frac{\partial w}{\partial t} \\
\end{matrix} \right .](e/61eaf97d81188efb9e9306728449c1c0.png)
![\{ \mathcal{V} \} =
\begin{matrix}\\ [1ex] \\ [1ex] \\ \end{matrix}_{\mathrm{G}} \begin{Bmatrix}
\dot{\theta}_x & 0 \\ [1ex]
\dot{\theta}_y & 0 \\ [1ex]
0 & \dot{w} \\
\end{Bmatrix}
= \begin{matrix}\\ [1ex] \\ [1ex] \\ \end{matrix}_{\mathrm{G}} \begin{Bmatrix}
\frac{\partial^2 w}{\partial y \partial t} & 0 \\ [1ex]
-\frac{\partial^2 w}{\partial x \partial t} & 0 \\ [1ex]
0 & \frac{\partial w}{\partial t} \\
\end{Bmatrix}](b/21b19217cac6af223b0ede30307b61cb.png)
![\{ \mathcal{V} \} =
\begin{matrix}\\ [1ex] \\ [1ex] \\ \end{matrix}_z \begin{Bmatrix}
\dot{\theta}_x & z \dot{\theta}_y \\ [1ex]
\dot{\theta}_y & -z \dot{\theta}_x \\ [1ex]
0 & \dot{w} \\
\end{Bmatrix}
= \begin{matrix}\\ [1ex] \\ [1ex] \\ \end{matrix}_z \begin{Bmatrix}
\frac{\partial^2 w}{\partial y \partial t} & -z \frac{\partial^2 w}{\partial x \partial t} \\ [1ex]
-\frac{\partial^2 w}{\partial x \partial t} & -z \frac{\partial^2 w}{\partial y \partial t} \\ [1ex]
0 & \frac{\partial w}{\partial t} \\
\end{Bmatrix}](a/caa97ebda8c959f22fc30da15ac62456.png)



![\begin{matrix}
\theta_x \neq \frac{\partial w}{\partial y} \text{ ;}\\ [1ex]
\theta_y \neq -\frac{\partial w}{\partial x} \text{.}\\
\end{matrix}](3/c9387d7620e4414c7eb5e9e9073551ac.png)
![\left \{
\begin{array}{l}
\varepsilon_{11} = z \cdot \frac{\partial \theta_y}{\partial x} \\ [1ex]
\varepsilon_{22} = -z \cdot \frac{\partial \theta_x}{\partial y} \\ [1ex]
\varepsilon_{33} = 0 \\ [1ex]
\varepsilon_{12} = \frac{z}{2} \left ( \frac{\partial \theta_y}{\partial y} - \frac{\partial \theta_x}{\partial x} \right ) \\ [1ex]
\end{array}
\right .](4/4149ccf8214acfb382eafba90c074a44.png)
![\vec{\chi} = \begin{pmatrix}
\frac{\partial \theta_y}{\partial x} \\ [1ex]
-\frac{\partial \theta_x}{\partial y} \\ [1ex]
\frac{1}{2} \left ( \frac{\partial \theta_y}{\partial y} - \frac{\partial \theta_x}{\partial x} \right )
\end{pmatrix}](6/81692d6f54be0035869a9b4a06115625.png)
Wikimedia Foundation. 2010.