- Puissance virtuelle
-
Principe des puissances virtuelles
Le principe des puissances virtuelles ou PPV est un principe fondamental en mécanique, qui postule un équilibre de puissance dans un mouvement virtuel, il s'agit d'une formulation duale du PFD. Il permet de retrouver certains principes ou théorèmes comme le principe fondamental de la dynamique et le théorème de l'énergie cinétique, et constitue aussi la base d'une démarche de modélisation pour les milieux continus (théorie du premier gradient, théorie du second gradient). On parle parfois du principe des travaux virtuels ou PTV qui est sensiblement le même principe.
Sommaire
Approche vulgarisée
Le principe de base est le suivant : si un solide est à l'équilibre (statique du solide), la somme des efforts est nulle. Donc si l'on fait faire un déplacement fictif (virtuel) à l'objet, la somme des puissances des forces et moments est nulle.
Ce principe permet parfois des calculs plus simples, en particulier en théorie des plaques.
En pratique, l'estimation des efforts appliqués à un système se fait toujours par l'intermédiaire d'un déplacement (ou déformation) de ce système :
- On soulève légèrement une valise pour connaître son poids.
- On presse sur le pneu du vélo, pour savoir si la pression de la chambre à air est suffisante.
- L'oculiste déforme légèrement la cornée de l'œil pour mesurer la pression intraoculaire.
- Avant de mettre en service un pont, on le charge par plusieurs camions et on mesure les petites déformations qui doivent être compatibles avec celles calculées par les codes de calcul.
Si idéalement, on effectue les expériences précédentes en des temps de plus en plus brefs, on passe à la limite; on obtient la mesure des efforts par la mesure des puissances mises en œuvre, pour les vitesses ayant servi de tests (vitesses virtuelles).
Exemple de la statique et de la dynamique d'un point matériel unique
Soit M un point matériel de masse m en équilibre par rapport à un repère galiléen
 . On note F la résultante des forces extérieures. Si
. On note F la résultante des forces extérieures. Si  est un vecteur quelconque de l'espace
est un vecteur quelconque de l'espace  , l'équation classique de la statique du point :
, l'équation classique de la statique du point :F = 0
est équivalente à :

Le produit
 est appelé la puissance virtuelle de la force F par rapport à .
est appelé la puissance virtuelle de la force F par rapport à .
Si le point M est en mouvement par rapport à, on note  l'accélération du point par rapport à ce repère.
l'accélération du point par rapport à ce repère.L'équation classique de la dynamique de M
F = ma
est équivalente à

Le produit
 est appelé puissance virtuelle des quantités d'accélération par rapport à .
est appelé puissance virtuelle des quantités d'accélération par rapport à .Genèse du principe
L'origine de ce principe revient à Jean Bernoulli, qui énonce en 1725 le principe des vitesses virtuelles, qui consiste à considérer la perturbation de l'équilibre d'un système mécanique par un mouvement infinitésimal respectant les conditions de liaison du système, un mouvement virtuel, et d'en déduire une égalité de puissance. Ce principe a été par la suite généralisé par D'Alembert et Lagrange en ce qui est connu actuellement sous le nom de principe de D'Alembert (1743).
Le principe des puissances virtuelles est une synthèse de ces principes, ancrée dans un cadre beaucoup plus rigoureux et mathématique (on parle alors de « dualisation » et non plus de « perturbation » de l'équilibre ou du mouvement par un mouvement infinitésimal).
Énoncé
N'est présenté ici que l'aspect le plus classique du PPV, à savoir celui où le champ cinématique est virtuel. On peut tout aussi bien développer ce principe avec un champ d'effort virtuel, mais la notion de champ d'effort admissible est plus lourde à mettre en place et moins intuitive.
Notations et définitions
Système mécanique
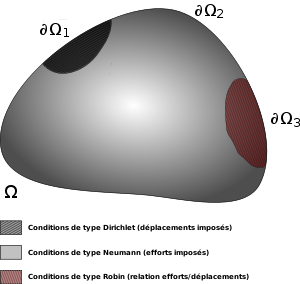 Problème mécanique type.
Problème mécanique type.
Un système mécanique Ω est défini par un domaine de l'espace que l'on décide d'étudier.
Exemples de systèmes mécaniques :
- un point matériel
- un solide indéformable
- un système de solides indéformables
- un milieu continu (solide déformable ou fluide).
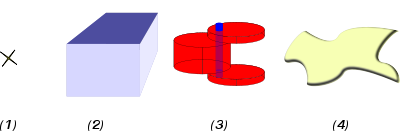 Exemples de systèmes mécaniques
Exemples de systèmes mécaniquesMouvement admissible d'un système mécanique
Soit Ω un système mécanique, on appelle mouvement admissible de Ω la donnée d'un champ de vitesse en tout point du domaine du système, compatible avec les mouvements possibles du système.
- Pour un point matériel dans l'espace sans conditions particulières, les mouvements admissibles sont les translations de l'espace.
- Pour un solide indéformable, il s'agit des translations et des rotations.
- Pour un milieu continu, on a, a priori n'importe quel champ de vitesse continu (voire discontinu si l'on veut pouvoir étudier la rupture).
Mouvement rigidifiant d'un système mécanique
Un mouvement rigidifiant d'un système Ω est un mouvement conférant au système un mouvement de corps rigide.
Si l'on considère un système dans l'espace et que O est l'origine d'un repère spatial, alors tout mouvement rigidifiant
peut s'écrire : où
où  et
et  sont des vecteurs uniformes
sont des vecteurs uniformes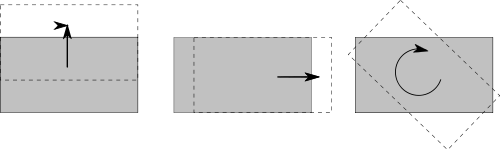 Mouvements rigidifiants d'un solide dans le plan.
Mouvements rigidifiants d'un solide dans le plan.Puissance accélératrice
La puissance accélératrice d'un système Ω est la puissance développée par les quantités d'accélération dans le champ de mouvement.
Pour un point matériel de masse m dans le champ de vitesse
 on obtient :
on obtient :
Pour un système de N points matériels de masses mi on obtient dans le champ vi :
Dans le cas d'un milieux continu (solides, fluides, etc.) de masse volumique ρ(M) dans un champ v(M) :

Puissance des efforts extérieurs
La puissance extérieure ou puissance des efforts extérieurs est la puissance développée par les efforts extérieurs dans le champ de vitesse.
Pour un point matériel soumis à la force F dans le champ de vitesse v elle s'exprime par :

Pour un système de N points Pi soumis aux forces Fi dans le champ vi :
Pour un milieu continu Ω de frontière
 soumis aux efforts volumiques f(M) et aux efforts surfaciques F(M) dans le champ v(M):
soumis aux efforts volumiques f(M) et aux efforts surfaciques F(M) dans le champ v(M):
Puissance des efforts intérieurs
La puissance des efforts intérieurs est la puissance développée par les efforts intérieurs (ou internes) au système considéré. Ce sont le plus souvent des efforts de contact (systèmes de points matériels ou de solides, milieux granulaires) ou des efforts de cohésion (milieux continus).
Pour un point matériel ou un solide indéformable, cette puissance est toujours nulle. Pour un système de points matériels ou de solides, elle peut s'exprimer de manière similaire à la puissance extérieure (en considérant les actions sur chacun des points/solides par les autres).
Pour un milieu continu, son expression dépend de la modélisation adoptée et peut être déduite du PPV et de quelques hypothèses de modélisation.
Énoncé
Soit
un référentiel galiléen. Les vitesses, accélérations et puissances sont prises par rapport à ce repère.- Soit Ω un système, soit
 un espace, dit espace des mouvements virtuels, qui contient l'ensemble des mouvements admissibles par Ω et
un espace, dit espace des mouvements virtuels, qui contient l'ensemble des mouvements admissibles par Ω et  l'espace des mouvements virtuels rigidifiants. On note respectivement
l'espace des mouvements virtuels rigidifiants. On note respectivement  et
et  la puissance accélératrice, la puissance des efforts extérieurs à Ω et la puissance des efforts intérieurs.
la puissance accélératrice, la puissance des efforts extérieurs à Ω et la puissance des efforts intérieurs.
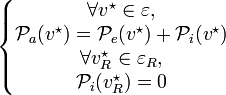
- Pour un système de points matériels quelconque, la puissance virtuelle d’accélération est égal à la somme des puissances virtuelles des efforts extérieurs et des efforts intérieurs, et la puissance virtuelle des efforts intérieurs dans un mouvement virtuel rigidifiant est nulle.
Principe des puissances virtuelles et théorèmes fondamentaux de la mécanique
Le Principe des puissances virtuelles (PPV) permet de retrouver entre autres le principe fondamental de la dynamique et le théorème de l'énergie cinétique.
Principe fondamental de la dynamique
Si l'on applique le a PPV à un solide soumis aux efforts volumiques f et surfaciques F en choisissant un champ rigidifiant
 on obtient :
on obtient :![\int_\Omega (f\cdot v_0^\star) + (OM\wedge f)\cdot\Omega_0^\star d\Omega \;+ \int_{\partial\Omega} F\cdot v_0^\star + \Omega_0^\star\cdot(OM\wedge F)dS = \int_\Omega \rho\left[\gamma\cdot(v_0^\star + OM\wedge \Omega_0^\star)\right]d\Omega](/pictures/frwiki/50/2e523cb972b85290f96689eebe7f5b15.png)
Ce qui traduit le fait que la réduction du torseur des actions extérieures en O – point fixe – est égale à la dérivée de la réduction du torseur cinétique au même point :

Où
 est le torseur des efforts extérieurs,
est le torseur des efforts extérieurs, est le torseur dynamique
est le torseur dynamiqueet
 est le torseur cinématique d'un champ rigidifiant.
est le torseur cinématique d'un champ rigidifiant.Théorème de l'énergie cinétique
Pour retrouver le théorème de l'énergie cinétique (notée T ici), il suffit de choisir comme mouvement virtuel le mouvement réel, on obtient alors immédiatement :
Utilisation du PPV
Calculs avec des réducteurs
Le PPV : une démarche de modélisation
Le PPV constitue une démarche de modélisation : en effet, nous avons vu qu'il comporte deux « volets », l'un traduisant un équilibre de puissance, l'autre une nullité dans un type de mouvement. Parmi les trois types de puissances, il en existe deux dont les expressions sont relativement simples (même si elles font en réalité déjà intervenir des hypothèses et font donc déjà partie d'une modélisation) et une, celle des efforts intérieurs, qui pose un réel problème dès que l'on sort du cadre des systèmes de points matériels ou des solides indéformables.
Pour pouvoir appliquer le PPV, nous devons donc proposer une écriture pour la puissance des efforts intérieurs. Pour ce faire, il existe principalement deux démarches. La première consiste à changer d'échelle, à considérer un volume élémentaire de matière et à en déduire une expression des efforts intérieurs et donc de leur puissance. Nous allons présenter ici une autre démarche, qui permet d'aboutir à la théorie du premier gradient et aux théories de gradients d'ordres plus élevés.
Exemples de modélisation des milieux continus
Théorie du gradient d'ordre zéro
- On suppose qu'il existe une densité volumique (ou massique) de puissance des efforts intérieurs, pi telle que
- On suppose que cette densité volumique peut s'écrire
 où A est un champ de vecteur.
où A est un champ de vecteur.
L'hypothèse 2. revient à représenter les efforts intérieurs par un champ de vecteur.
Soit le champ rigidifiant
 , d'après le PPV on a donc :
, d'après le PPV on a donc :
Ce qui conduit à A = 0
On vient de montrer que si l'on représente les efforts intérieurs par un champ de vecteur, ce champ est nécessairement nul.
Théorie des gradients
On peut remplacer l'hypothèse 2. par l'hypothèse suivante :
2'. la densité volumique de puissance des efforts intérieurs et une forme linéaire de
faisant intervenir et ses gradients successifs.Si l'on choisit de s'arrêter au premier gradient, on obtient la théorie du premier gradient, qui est la modélisation la plus courante pour un milieu continu, on peut alors montrer que les efforts intérieurs sont représentés par un tenseur d'ordre 2,
 , qui est symétrique et vérifie
, qui est symétrique et vérifie  où n est le vecteur normal sortant à la frontière de Ω et F l'effort surfacique appliqué sur cette frontière.
où n est le vecteur normal sortant à la frontière de Ω et F l'effort surfacique appliqué sur cette frontière.On peut prendre des gradients d'ordres plus élevés, ce qui conduit à des modèles plus complexes mais permettant de rendre compte d'effets plus subtils. Ainsi, avec le premier gradient, on ne peut pas couper une motte de beurre, et il faut monter au troisième gradient pour pouvoir la perforer.
Notes et références
- Jean Salençon, Mécanique du continu, tome 1 : Concepts généraux, Ellipses Marketing, coll. « Universités francophones », 5 mai 1998, 352 p. (ISBN 978-2729845513)
- Patrick Letallec, Mécanique des milieux continus, notes de cours de MEC431, Bibliothèque de l'École Polytechnique, 2008, 458 p.
- Adolphe Pierre-Marie Guibert, Propriétés générales de l'équilibre d'un système de corps. Propriétés générales du mouvement d'un système de corps. Suivi de Solution, par les séries, du problème de Képler, et détermination des coordonnées d'une planète, en supposant très petites son excentricité et l'inclinaison de son orbite, A. Belin, coll. « Thèses présentées à la faculté des sciences de Paris. », Paris, 1831, viii-46 p.
- Jean Bernoulli, Nouvelle mécanique de Varignon, tome II, Paris, 1725
 Portail de la physique
Portail de la physique
Catégorie : Mécanique



Wikimedia Foundation. 2010.