- Radar à balayage conique
-
Radar monopulse
Le radar monopulse est une adaptation du radar à balayage conique qui envoie des informations supplémentaires dans le signal pour éviter les problèmes posés par les changements rapides de la force du signal. Le système permet également d'être moins sensible au brouillage. La plupart des radars conçus depuis les années 1960 sont des systèmes monopulse.
Sommaire
Description
Balayage conique
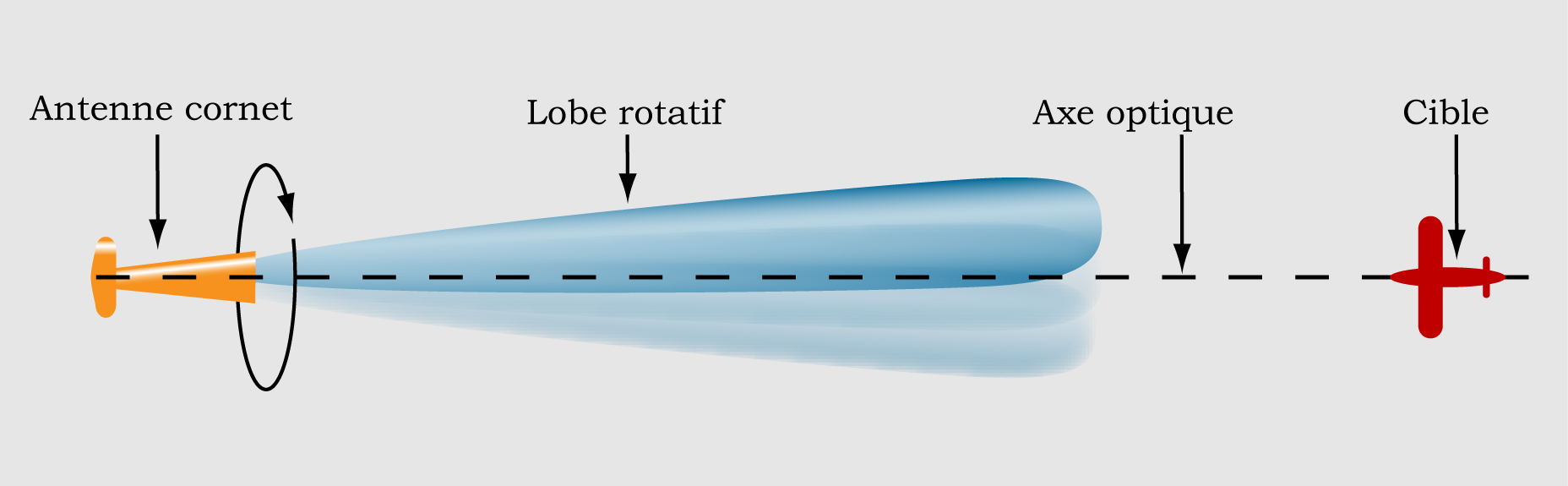
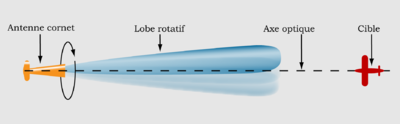 Lobe rotatif d'un système à balayage conique.
Lobe rotatif d'un système à balayage conique.
Les systèmes à balayage conique envoient un signal légèrement décalé sur l'un des côtés de l'axe optique de l'antenne, puis, en faisant tourner l'antenne sur elle-même, font que le lobe de rayonnement tourne autour de cet axe optique. Une cible centrée sur l'axe optique sera en permanence placée dans le lobe et renverra donc un signal puissant. Si la cible est sur le côté, elle ne renverra d'écho que lorsque le lobe — au cours de sa rotation — sera pointé vers elle, il en résultera un signal moyen plus faible, ou intermittent si la vitesse de rotation est suffisamment lente. La force du signal atteindra son maximum lorsque l'antenne sera exactement pointée dans la direction de la cible ; en maintenant l'antenne dirigée pour un retour maximum on pourra faire une poursuite automatique de la cible.
Le problème de cette technique est que la force du signal reçu varie souvent pour des raisons autres que la rotation du lobe. Par exemple, sur une période de quelques dizaines de secondes, le signal peut être considérablement affecté par des changements de direction de la cible, par la pluie, par des nuages, etc. Étant donné que le principe même des radars à balayage conique est basé sur les variations d'amplitude du signal reçu, de telles sources d'erreur obèrent considérablement la précision du système.
Les radars à balayage conique sont également assez faciles à brouiller. Il suffit pour cela d'envoyer vers le radar un signal calé sur sa fréquence et suffisamment puissant pour qu'il soit analysé comme étant le « pic » de l'écho reçu. C'est ainsi qu'une série de courtes rafales de signal, émises au hasard, feront apparaître une série de fausses cibles avec des positions différentes. On peut rendre le brouillage encore plus efficace en synchronisant les signaux parasites avec la vitesse de rotation de l'antenne, mais avec un petit retard, ce qui génère un deuxième « spot[1] » tout à fait semblable au premier si bien que rien ne permet de les distinguer. Ce type de brouillage a été mis au point assez rapidement et pendant la Seconde Guerre mondiale les Britanniques l'ont utilisé contre le Würzburg radar[2] (radar à balayage conique allemand).
Radar monopulse
Les radars monopulse ressemblent aux radars à balayage conique mais intègrent une sophistication supplémentaire. Au lieu d'émettre le signal tel quel à la sortie de l'antenne, le faisceau est divisé en plusieurs lobes (deux le plus souvent) chacun dirigé dans une direction légèrement différente tout en gardant un certain recouvrement. Ensuite, les signaux réfléchis sont reçus, amplifiés et traités séparément puis comparés les uns aux autres. On détermine ainsi le signal reçu le plus puissant et, partant, la direction de la cible. Étant donné que la comparaison se fait sur des signaux émis pendant le même train, généralement quelques microsecondes, on s'affranchit des changements de position ou de direction de la cible.
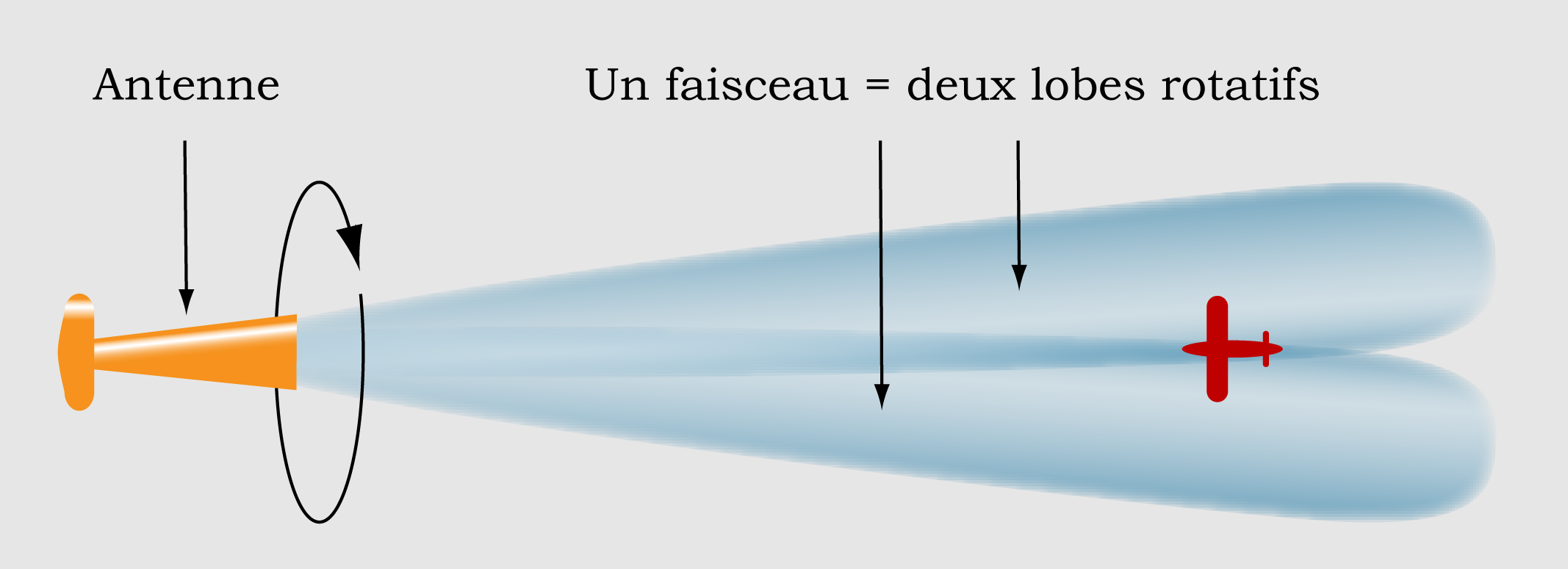
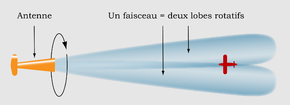 Faisceau d'un radar monopulse divisé en deux lobes rotatifs.
Faisceau d'un radar monopulse divisé en deux lobes rotatifs.Mais pour pouvoir comparer les lobes efficacement, il faut que chacun soit bien repéré. Pour cela, à l'émission, on divise le faisceau généralement en deux et chaque lobe est polarisé de façon différente. Ces lobes sont mis en rotation, comme pour un radar à balayage conique classique. À la réception, les signaux sont à nouveau séparés grâce à la polarisation et un des signaux est inversé en puissance, ensuite les deux sont additionnés. Si la cible est située d'un côté de l'axe optique de l'antenne, la somme résultante sera positive, et de l'autre côté, elle sera négative.
Si les lobes sont suffisamment proches, ce système peut donner un très bon niveau de précision concernant la direction, en plus de la précision normale du système à balayage conique. Là où les radars classiques affichent une erreur de l'ordre de 0,1 degré, les radars monopulse sont dix fois plus pointus, et les modèles les plus sophistiqués comme le AN/FPS-16[3] permettent des précisions de 0,006 degré ; ceci représente une approximation de 10 m pour une portée de 100 km.
La résistance au brouillage est bien meilleure qu'avec les systèmes à balayage conique. On insère des filtres qui suppriment les signaux qui ne sont pas polarisés ou qui ne sont polarisés que dans une seule direction. Un bon système de brouillage devrait donc reproduire à la fois la polarisation et la fréquence de rotation. Comme un avion ne se trouve à un temps t que dans un seul lobe, il est très difficile de déterminer la polarisation du signal. Pour brouiller ces radars, les stations de contre-mesure — plutôt que d'essayer de produire de faux échos — se contentent d'émettre un signal puissant à large spectre pour simplement « aveugler » le radar.
Historique
Au moment de leur apparition en 1943 au Laboratoire de recherche de la marine américaine (NRL ou Naval Research Laboratory), les radars monopulse étaient très innovants et, du coup, étaient à la fois très onéreux et très difficiles à entretenir. On les réservait donc aux usages nécessitant une grande précision justifiant le coût. Parmi les premières applications on compte le missile Nike Ajax[4] qui réclame une extrême précision, ou les radars de surveillance de lancement de différents missiles. Dans les années 1970 on vit apparaître une des installations les plus importantes, l'AN/SPY–1[5] de l'US Navy utilisé par le système de combat Aegis. Avec le temps, le coût des systèmes de poursuite monopulse a baissé et cette technologie est utilisée aujourd'hui dans tous les radars modernes, y compris dans les applications « jetables » telles que les radars embarqués dans les missiles.
Notes et références
- (en) Cet article est partiellement ou en totalité issu d’une traduction de l’article de Wikipédia en anglais intitulé « Monopulse radar ».
- ↑ Spot : anglicisme utilisé pour désigner la marque que laisse une cible sur un écran radar.
- ↑ Le Würzburg radar était le principal système de guidage de tirs d'artillerie pour la Luftwaffe et l'armée allemande pendant la Seconde Guerre mondiale.
 (en) On peut consulter sur la Wikipedia anglophone l'article : Würzburg radar.
(en) On peut consulter sur la Wikipedia anglophone l'article : Würzburg radar. - ↑ Le AN/FPS-16 est un radar terrestre américain fixe à très haute précision utilisant la technologie monopulse qui a été largement utilisé par la NASA et l'US Air Force. (en) On peut consulter sur la Wikipedia anglophone l'article : AN/FPS-16.
- ↑ Les missiles Nike Ajax (MIM–3) furent déployés à partir de 1953. C'est le premier missile opérationnel construit dans le cadre du « Projet Nike » démarré en 1945 pour développer des systèmes de missiles sol–air « à vue ». (en) À ce sujet, on peut consulter sur la Wikipedia anglophone l'article : Nike (rocket).
- ↑ Le AN/SPY-1 est un système de radar de l'US Navy construit par Lockheed Martin. (en) On peut consulter sur la Wikipedia anglophone l'article : AN/SPY–1.
 Portail de la physique
Portail de la physique Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique Portail de l’aéronautique
Portail de l’aéronautique Portail du monde maritime
Portail du monde maritime
Catégorie : Type de radar
Wikimedia Foundation. 2010.