- Mécanique cinématique
-
Cinématique
En physique, la cinématique est la discipline de la mécanique qui étudie le mouvement des corps, en faisant abstraction des causes du mouvement (celles-ci sont généralement modélisées par des forces et des moments). Elle utilise la géométrie analytique.
On peut dater la naissance de la cinématique moderne à l'allocution de Pierre Varignon le 20 janvier 1700 devant l'académie royale des sciences de Paris[1]. À cette occasion il définit la notion d'accélération et montre comment il est possible de la déduire de la vitesse instantanée à l'aide d'une simple procédure de calcul différentiel.
Sommaire
Définitions de base
Il faut d'abord définir un référentiel, c'est-à-dire un repère de l’espace et une référence pour le temps, une horloge[2] ; on utilise en général le référentiel lié au laboratoire, par exemple dont les axes suivent les arêtes des murs de la pièce, ou bien celle de la table, ou encore les directions géographiques Nord-Sud, Est-Ouest et haut-bas (si le laboratoire est immobile par rapport au sol). L'objet de base est le point, dont les dimensions nulles, et qui est défini par ses coordonnées
 .
.Concrètement, cet objet physique défini par quatre paramètres représente soit un objet de petite taille (particule, petite bille), soit un objet de grande taille dont on néglige les effets de rotation sur lui-même ; nous appellerons cet objet le mobile. On ne s’intéresse alors qu'au mouvement dans l'espace du centre d’inertie de ce mobile. Le centre d’inertie d'un objet est encore appelé centre de masse ou centre de gravité.
Les coordonnées définissent le vecteur-position, qui dépend ainsi de la position et du temps[3].
Le vecteur obtenu en dérivant les coordonnées par rapport au temps définit le vecteur-vitesse. Le vecteur vitesse est indépendant du choix du point origine[3].
Le vecteur obtenu en dérivant les composantes du vecteur vitesse par rapport au temps définit le vecteur-accélération
La mécanique du point permet de prévoir la position en fonction du temps, à partir de la vitesse initiale et des forces.
L'équation horaire du mouvement
correspond à l’équation paramétrique d'une courbe ; on peut souvent réduire ceci à un système d’équations cartésiennes
qui, dans le cas le plus simple, sont du type linéaire
Cette courbe est l’ensemble des points par où passe le centre d'inertie du mobile. On définit alors l’abscisse curviligne, notée
 , la distance parcourue sur la courbe par rapport à un point de référence (la position du centre d'inertie du mobile à
, la distance parcourue sur la courbe par rapport à un point de référence (la position du centre d'inertie du mobile à  . Pour un petit déplacement de M(x, y, z) à M'(x + dx, y + dy, z + dz), l'abscisse curviligne est assimilable à un segment, d'où:
. Pour un petit déplacement de M(x, y, z) à M'(x + dx, y + dy, z + dz), l'abscisse curviligne est assimilable à un segment, d'où:
- On a donc
 .
.
La notion commune de vitesse est en fait la dérivée de l'abscisse curviligne. On parle souvent de vitesse scalaire[4] :
On a en fait
 Définition de l'abscisse curviligne
Définition de l'abscisse curviligne
On ne considère en général, pour simplifier l'étude, que des mouvements plans (que le plan soit horizontal, vertical ou incliné). On définit donc un repère
 dans ce plan, ce qui permet de ne travailler qu'avec deux coordonnées.
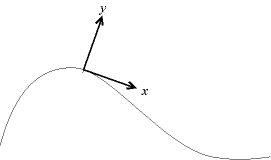
dans ce plan, ce qui permet de ne travailler qu'avec deux coordonnées.Pour simplifier les calculs, on définit souvent un repère local dit « de Frenet » pour chaque instant ; en un point de la courbe, l'axe des
 est la tangente à la courbe et orienté dans le sens du mouvement, et l'axe des
est la tangente à la courbe et orienté dans le sens du mouvement, et l'axe des  est la normale à la courbe orienté de sorte que le repère soit direct[5]. Ce n'est pas un référentiel mobile par rapport au référentiel de l'étude, c'est un repère « jetable », défini juste à un instant
est la normale à la courbe orienté de sorte que le repère soit direct[5]. Ce n'est pas un référentiel mobile par rapport au référentiel de l'étude, c'est un repère « jetable », défini juste à un instant  pour simplifier l'écriture des grandeurs à cet instant donné. Le référentiel reste celui du laboratoire, seule change la manière dont on exprime les composantes des vecteurs.
pour simplifier l'écriture des grandeurs à cet instant donné. Le référentiel reste celui du laboratoire, seule change la manière dont on exprime les composantes des vecteurs. Définition du repère de Frenet
Définition du repère de FrenetMouvement simple
Le problème est donc ramené à trouver la fonction donnant la position sur la courbe en fonction du temps, soit
 . On appelle diagramme horaire le graphe de
. On appelle diagramme horaire le graphe de ![[t,s(t)]\,](/pictures/frwiki/54/69b491c3c012e9cfbf8e71bd931e153d.png) : de tels diagrammes sont très utilisés pour les trains (par exemple en France, le CHAIX donne pour l'ensemble du réseau les diagrammes horaires, ce qui permet de calculer les tableaux de correspondance de transport de gare en gare).
: de tels diagrammes sont très utilisés pour les trains (par exemple en France, le CHAIX donne pour l'ensemble du réseau les diagrammes horaires, ce qui permet de calculer les tableaux de correspondance de transport de gare en gare).Mouvement rectiligne
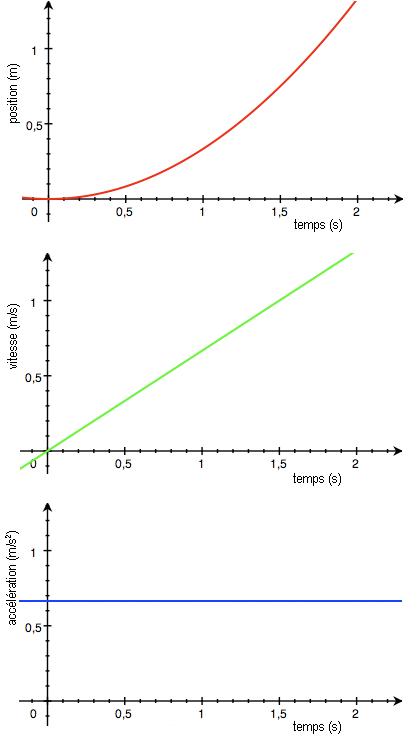
 Evolution de la position, de la vitesse et de l'accélération d'un corps dans un mouvement rectiligne uniforme.
Evolution de la position, de la vitesse et de l'accélération d'un corps dans un mouvement rectiligne uniforme.Le cas le plus simple est celui du mouvement rectiligne : la trajectoire décrite est une droite!
Mouvement rectiligne uniforme
Le mouvement est dit rectiligne uniforme si la vitesse
 est constante ; cela correspond au mouvement d'un objet lancé dans l'espace hors de toute interaction, ou encore au mouvement d'un objet glissant sans frottement. On a :
est constante ; cela correspond au mouvement d'un objet lancé dans l'espace hors de toute interaction, ou encore au mouvement d'un objet glissant sans frottement. On a : 
L'abscisse curviligne est alors une fonction linéaire du temps.
Mouvement dans lequel tout segment reliant 2 points du solide reste parallèle à lui-même au cours du temps est aussi une définition classique du mouvement rectiligne uniforme.
En étude des vitesses, ce type de mouvement a une propriété fondamentale. Tous les points d'un solide en translation rectiligne uniforme ont le même vecteur vitesse.
On considère de plus qu'un solide immobile est en translation rectiligne uniforme : L'immobilité est un cas particulier du mouvement rectiligne uniforme.
Mouvement rectiligne uniformément accéléré
 Evolution de la position, de la vitesse et de l'accélération d'un corps dans un mouvement rectiligne uniformément accéléré.
Evolution de la position, de la vitesse et de l'accélération d'un corps dans un mouvement rectiligne uniformément accéléré.Le mouvement peut être rectiligne uniformément accéléré - MRUA - (on dit aussi rectiligne uniformément varié) ; le vecteur accélération
 est constant. Ceci correspond à la chute libre (sans frottement) d'un objet lâché avec une vitesse initiale nulle ou dirigée verticalement ; ou bien un mouvement sans frottement sur un plan incliné d'un mobile lâché avec une vitesse initiale nulle ou dirigée par la pente du plan incliné. On a l'accélération
est constant. Ceci correspond à la chute libre (sans frottement) d'un objet lâché avec une vitesse initiale nulle ou dirigée verticalement ; ou bien un mouvement sans frottement sur un plan incliné d'un mobile lâché avec une vitesse initiale nulle ou dirigée par la pente du plan incliné. On a l'accélérationqui est constante, soit :
où
 est la vitesse à
est la vitesse à  (elle est nulle si l'objet est lâché sans vitesse initiale), et
(elle est nulle si l'objet est lâché sans vitesse initiale), et(on prend
 à ). La vitesse est une fonction linéaire du temps, et l'abscisse curviligne est une fonction parabolique du temps.
à ). La vitesse est une fonction linéaire du temps, et l'abscisse curviligne est une fonction parabolique du temps.Dans le cas de la chute d'un corps, a = -g, où g est l'accélération de la pesanteur au lieu considéré.
le temps nécessaire au solide pour atteindre une position, se calcule en fonction de l'accélération et en fonction des conditions initiales.
Exemple
Prenons une fusée dont la position x varie à chaque instant t ; elle suit une trajectoire rectiligne A–B. Elle subit une accélération a de 6 m·s-2, et on prend x = 0 et v = 0 à t = 0.
Si sa vitesse était constante, on aurait
- x= v·t.
Mais comme la fusée a une accélération continue, il faut utiliser
- x = 1/2·a·t 2.
((6x0.5)x(5²))=75
Donc, après 5 secondes de vol depuis A, la fusée est à 75 mètres de A. Maintenant pour connaître sa vitesse, on calcule
- v = a·t.
Donc si la fusée est en vol depuis 5 secondes, sa vitesse est de 30 m·s-1.
Mouvement circulaire
Le centre d'inertie du mobile décrit un cercle. Cela peut être un mobile contraint à suivre cette trajectoire comme par exemple une bille dans une gouttière circulaire, un pendule à fil dont le fil reste tendu, ou un train sur un rail circulaire.
Le mouvement est dit circulaire uniforme si la norme
de la vitesse est constante. L'équation horaire est alors du typeoù (
 ,
,  ) sont les coordonnées du centre du cercle,
) sont les coordonnées du centre du cercle,  est le rayon du cercle et
est le rayon du cercle et  est la vitesse angulaire du centre d'inertie du mobile, exprimée en radian par seconde. On a :
est la vitesse angulaire du centre d'inertie du mobile, exprimée en radian par seconde. On a :Le vecteur vitesse est tangent au cercle ; on a :
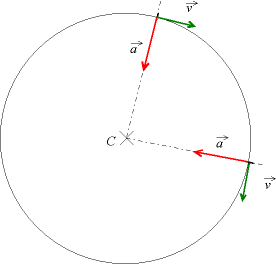
On voit aussi que l'accélération est toujours dirigée vers le centre du cercle (on parle d’accélération centrale centripète), et sa norme vaut
Ceci explique que lorsque l'on tourne en voiture, plus le virage est serré (
est faible), plus l'accélération est importante. mouvement circulaire uniforme : la vitesse est tangentielle et l'accélération est centripète - l'accélération et la vitesse n'étant pas homogènes, on utilise une échelle différente pour ces deux types de vecteur
mouvement circulaire uniforme : la vitesse est tangentielle et l'accélération est centripète - l'accélération et la vitesse n'étant pas homogènes, on utilise une échelle différente pour ces deux types de vecteurDans le repère de Frenet, on a :
Le mouvement du pendule à fil ou d'une bille dans une gouttière est circulaire mais pas uniforme.
Mouvement elliptique
Le centre d'inertie du mobile décrit une ellipse (le mouvement circulaire est un cas particulier du mouvement elliptique). Cela peut être le mouvement d'une voiture sur une courbe suivant un arc d'ellipse, ou bien celui d'un satellite autour d'une planète dans un référentiel galiléen dans lequel la planète est fixe, ou encore le mouvement d'une planète ou d'une comète autour d'une étoile ; l'objet le plus massif est alors à un des foyers de l'ellipse.
On définit la vitesse aréolaire comme étant l'aire balayée par un rayon joignant le foyer au centre d'inertie du mobile.
Dans le cas des mouvement orbitaux, le moment cinétique
 par rapport à un foyer ƒ est constant (ceci peut se déduire du principe de conservation du moment cinétique d'un système isolé) :
par rapport à un foyer ƒ est constant (ceci peut se déduire du principe de conservation du moment cinétique d'un système isolé) :où
 est le vecteur reliant le foyer au mobile ;
est le vecteur reliant le foyer au mobile ; est la quantité de mouvement du mobile (m est la masse,
est la quantité de mouvement du mobile (m est la masse,  le vecteur vitesse)
le vecteur vitesse) désigne le produit vectoriel.
désigne le produit vectoriel.
Voir les articles détaillés Orbite, Mécanique céleste, Problème à deux corps, Mouvement à force centrale et Lois de Kepler.
Mouvement quelconque
Pour considérer les mouvement quelconques, on peut travailler de deux manières :
- considérer localement la tangente au mouvement, et utiliser les notions développées avec les trajectoires rectilignes uniformes
- considérer localement que l'on a un mouvement circulaire uniforme.
Ces deux approximations sont valables si l'on considère des temps courts.
Approximation tangentielle
En général, le mouvement du centre d'inertie d'un mobile est enregistré de manière échantillonnée, c'est-à-dire que l'on a des points discrets correspondant à des position à des instants séparés d'une durée
 . Si l'on considère trois points consécutifs
. Si l'on considère trois points consécutifs  ,
,  et
et  , correspondant à des instants
, correspondant à des instants  et
et  .
.La première approximation consiste à dire que la tangente en
est parallèle à la corde ![[M_1 M_3]\,](/pictures/frwiki/99/cd3873f75def7274ec97bfaa3e286ec0.png) . Ceci est légitimé par un théorème mathématique disant que pour une fonction continue et dérivable sur un intervalle, il existe un point de cet intervalle dont la dérivée vaut la pente entre les points extrêmes de la courbe sur cet intervalle (voir Théorème des accroissements finis). On peut aussi rapprocher cela du fait que sur un cercle, la médiatrice d'une corde passe par le milieu de la corde et est perpendiculaire à la tangente au milieu de la corde (puisque c'est un rayon).
. Ceci est légitimé par un théorème mathématique disant que pour une fonction continue et dérivable sur un intervalle, il existe un point de cet intervalle dont la dérivée vaut la pente entre les points extrêmes de la courbe sur cet intervalle (voir Théorème des accroissements finis). On peut aussi rapprocher cela du fait que sur un cercle, la médiatrice d'une corde passe par le milieu de la corde et est perpendiculaire à la tangente au milieu de la corde (puisque c'est un rayon).La deuxième approximation consiste à estimer la norme de la vitesse constante entre
et , ce qui est acceptable si la durée est petite par rapport à l'accélération tangentielle. On estime donc que l'on aLa variation de ce vecteur vitesse donne le vecteur accélération. La composante tangentielle vaut :
ou par approximation
en effet, dans le repère de Frenet, on a
 , et on fait l'approximation
, et on fait l'approximation  (approximation d'ordre 0). La composante normale est donnée par la variation de direction du vecteur vitesse ; on a
(approximation d'ordre 0). La composante normale est donnée par la variation de direction du vecteur vitesse ; on a  par définition du repère de Frenet, soit
par définition du repère de Frenet, soit(approximation d'ordre 1, puisque l'ordre 0 est nul).
 détermination de la vitesse et de l'accélération à partir d'un relevé des positions à des instants séparés de delta t
détermination de la vitesse et de l'accélération à partir d'un relevé des positions à des instants séparés de delta tDans le cas où le mouvement est lent par rapport à la précision de la mesure, la position enregistrée va avoir des variations dues aux incertitudes de mesure ; ainsi, au lieu d'avoir une courbe lisse, on va avoir une courbe présentant des oscillations (du bruit). Si l'on prend les points tels quels, on va calculer des vitesses instantanées incohérentes qui vont se répercuter sur les calculs des accélérations. Si les données sont traitées de manière informatique, on effectue donc un lissage des données.
Rayon de courbure
choisissons sur une courbe (C) un point M0 comme origine, et désignons par M(t) la position du mobile à l'instant t et par s = M0M l'abscisse curviligne du point M.

On définit en tout point le rayon de courbure ρ de la trajectoire, par :
où dθ est l'angle formé entre les deux vecteurs vitesse aux point M(t) et M'(t+dt).
Exemple
Dans le repère
 , considérons le mouvement d'équation horaire :
, considérons le mouvement d'équation horaire :- x = 1 + cos 2t et y = sin 2t
le vecteur position s'écrit
le vecteur vitesse s'écrit
le module du vecteur vitesse est
- ||v|| = 2, c'est une constante.
L'accélération tangentielle est
 .
.
Le vecteur accélération totale est :
son module est
- | | a | | = 4, c'est une constante.
Les accélérations totale, tangentielle et normale forment un triangle rectangle ayant l'accélération totale pour hypoténuse ; alors d'après le théorème de Pythagore on a : a2 = at2 + an2 ce qui donne que
- an = 4
Or on a :
donc
- ρ = 1, c'est une constante
donc cette courbe n'est autre qu'un cercle.
Enregistrement du mouvement
L'enregistrement du mouvement, c'est-à-dire le relevé de la position et de la vitesse, est le fondement de l'étude cinématique.
Enseignement et travaux pratiques
Le pré-requis pour faire une étude cinématique consiste à enregistrer le mouvement. Dans le cadre de l'enseignement, on étudie en général le mouvement de palets autoporteurs. Ce sont des appareils cylindriques sur coussin d'air (un jet d'air les maintient quelques millimètres au-dessus de la table), ce qui leur permet de glisser sans frottement (on néglige les frottements de l'air). On utilise une table conductrice d'électricité avec un papier spécial ; reliés à une base de temps (une horloge qui délivre des impulsions électriques à des instants espacés de
), les palets autoporteurs provoquent des étincelles qui marquent le papier spécial. Ainsi, chaque point sur le papier correspond à la position du centre d'inertie à un instant donné. Ceci permet d'étudier le mouvement sur un plan horizontal et incliné, éventuellement avec deux palets (indépendants, reliés par un élastique ou s'entrechoquant).Pour étudier la chute libre verticale, on utilise un objet lourd et profilé, une sorte d'obus métallique, que l'on fait tomber verticalement dans une cage (afin qu'il ne bascule pas après l'impact sur la zone de réception). On colle une feuille de papier dessus, et la cage est munie d'une « lance rotative », projetant un fin jet d'encre. La lance tournant selon une fréquence constante, chaque trait sur le papier marque le point présent au niveau de la lance à un moment donné.
Grâce à la réduction du coût du matériel informatique, on peut maintenant disposer d'un caméscope numérique. On peut donc filmer le mouvement (le caméscope étant fixe, posé sur un pied), puis en affichant les images une par une, relever la position de l'objet pour chaque image (en France, la vidéo enregistre 25 images par seconde).
Sur la route
Les forces de police s'intéressent en général uniquement à la vitesse et disposent de cinémomètres à effet Doppler-Fizeau, improprement appelés « radars ». Ceux-ci permettent de mesurer directement la vitesse instantanée. Lorsque s'est produit un accident, les traces de freinage, et les éventuelles traces d'impact sur le mobilier urbain ou les rails de sécurité, permettent de recomposer la trajectoire des véhicules. Notamment, la longueur des traces de freinage permet d'estimer la vitesse avant le début du freinage (la force de freinage étant constante).
Le conducteur, quant à lui, dispose d'un tachymètre (indicateur de vitesse) sur son tableau de bord, qui lui permet de connaître également sa vitesse instantanée. Il se base en général sur la fréquence de rotation des roues ; par exemple, une pastille réfléchissante est collée sur l'arbre de transmission, et une cellule photo-détectrice permet de connaître le temps qui s'écoule entre deux passage de la pastille, donc la fréquence de rotation, donc la vitesse.
Les cyclistes mettent un aimant sur un rayon de la roue avant et un détecteur magnétique sur la fourche, ce qui leur permet, de la même manière, de mesurer la vitesse et le chemin parcouru. D'anciens systèmes étaient basés sur une petite roue tournant, entraînée par la roue du vélo.
Les marcheurs disposent de podomètres qui détectent les vibrations caractéristiques du pas. Le marcheur ayant rentré la longueur moyenne de son pas, l'appareil peut déterminer la distance parcourue ainsi que la vitesse (produit de la longueur du pas par la fréquence de pas).
La vidéo couplée à l'analyse informatisée des images permet également de déterminer la position et la vitesse des véhicules. Ceci est utilisé pour estimer le trafic et détecter les embouteillages, et pourrait faire son apparition dans les véhicules dans un avenir proche, afin de fournir une aide à la conduite (par exemple évaluation des distances de sécurité en fonction de la vitesse, détection de trajectoires anormales et de freinage d'urgence).
Aux débuts de la navigation maritime côtière, les marins se repéraient grâce aux reliefs de la côte. Les éléments caractéristiques (villes, phares, églises...), appelés amers, sont toujours utilisés et permettent une localisation rapide et simple, facilement exploitable en cas de demande de secours (voir Navigation par relèvements).
La navigation au long cours fut rendue possible grâce au développement des horloges ; en effet, elle utilisait la position des astres, or celle-ci varie avec l'heure. Connaissant la date et l'heure, et muni d'un éphéméride (relevé des positions des étoiles selon la date et l'heure), les astres jouaient alors le même rôle que les repères côtiers (voir Navigation astronomique).
La boussole permet de déterminer le cap que l'on suit, et pour un navire, la vitesse peut être estimée par la vitesse du vent et les courants. Ceci permet d'anticiper la trajectoire.
Pour se repérer, les aviateurs et marins naviguant aux instruments disposent des signaux émis par des satellites (système GPS et futur système Galileo) ou des balises radio au sol. Des satellites émettent des signaux synchronisés, et le décalage entre la réception des signaux permet de déterminer la position sur le globe terrestre (voir Système de positionnement) ; ces systèmes sont également accessibles aux véhicules terrestres et aux piétons. Pour le décollage et l'atterrissage, les avions disposent de balises radio posées au sol leur donnant un repérage précis par rapport à la piste, permettant des manœuvres sans visibilité (de nuit ou par mauvais temps).
Les systèmes de surveillance aérienne (tour de contrôle, aviation civile, armée) ou nautique (CROSS, centre régional opérationnel de surveillance et de sauvetage), ainsi que certains avions et navires, sont munis de radars. Ces dispositifs émettent une impulsion radio dans toutes les directions (en général avec une antenne tournante). Une impulsion revient si elle rencontre un obstacle ; le temps qu'elle met à revenir permet de déterminer la distance de l'obstacle, et le décalage en fréquence permet de déterminer la vitesse de l'obstacle (effet Doppler-Fizeau).
Voir aussi l'article Triangulation.
Références
- ↑ Pierre Varignon, Du mouvement en générale par toutes sortes de courbes, & des forces centrales, tant centrifuges que centripètes, nécessaires aux corps qui les décrivent, Mémoires de l'Académie Royale des Sciences (MARS), 1700, Pag 83-101, Consulter l'article
- ↑ (fr) Université en ligne, Mécanique
- ↑ a et b (fr) Vecteur position, Vitesse, Accélération
- ↑ (fr) Mécanique du point matériel, PDF sur les bases
- ↑ (fr) Repère de Frenet
Voir aussi
 Portail de la physique
Portail de la physique Portail du génie mécanique
Portail du génie mécanique
Catégories : Mécanique | Cinématique

























Wikimedia Foundation. 2010.