- Captation de mouvements
-
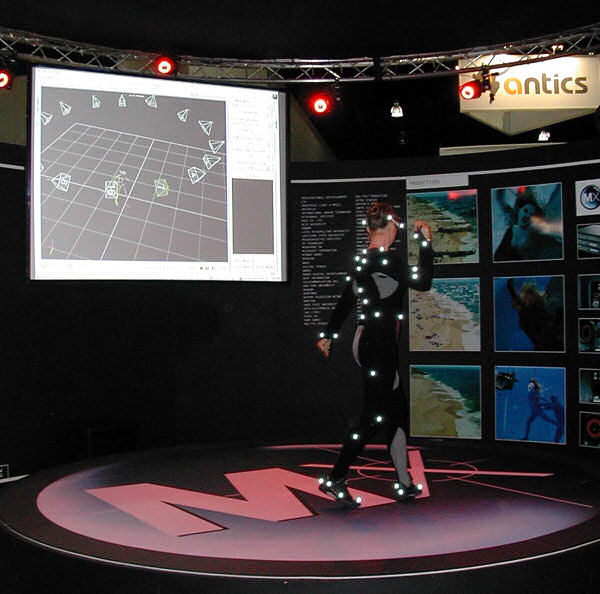
 Un danseur portant une combinaison avec des marqueurs passifs réfléchissant, lors d'une capture optique de mouvements.
Un danseur portant une combinaison avec des marqueurs passifs réfléchissant, lors d'une capture optique de mouvements.
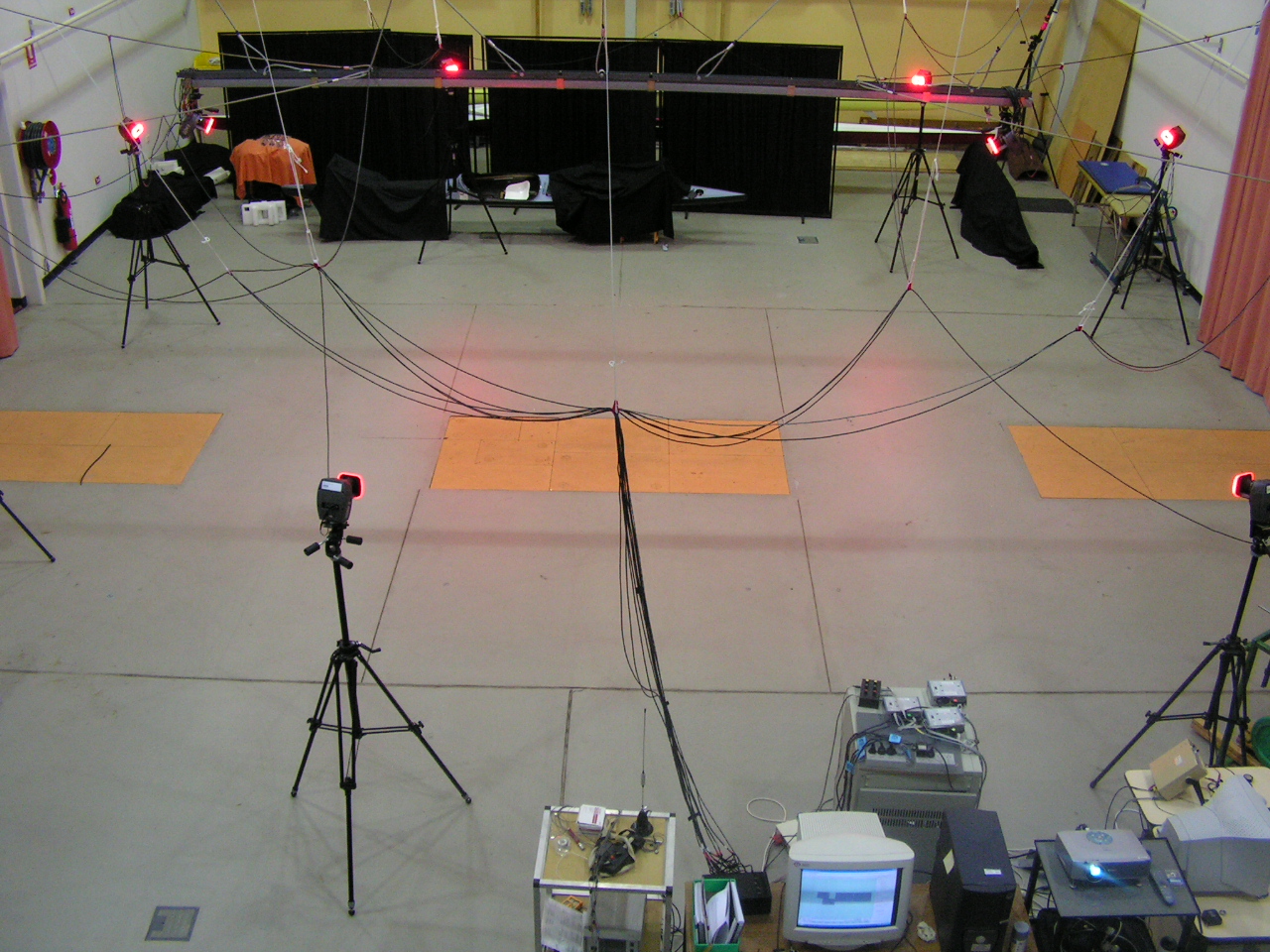
 Une salle d'enregistrement dédiée à la captation de mouvements, équipée de plateformes sensibles aux pressions et de caméras infrarouge.
Une salle d'enregistrement dédiée à la captation de mouvements, équipée de plateformes sensibles aux pressions et de caméras infrarouge.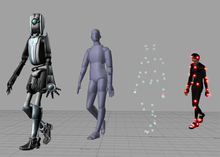 Un système de marqueurs actifs de haute résolution fournit en temps réel des positions infra-millimétriques.
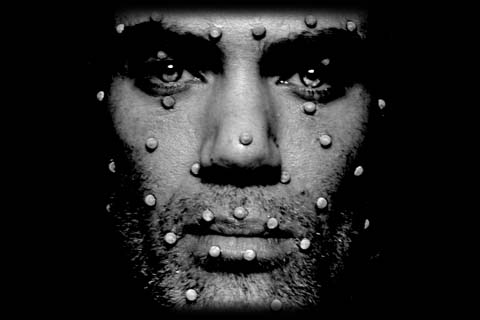
Un système de marqueurs actifs de haute résolution fournit en temps réel des positions infra-millimétriques.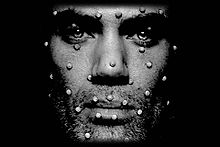 Plusieurs marqueurs positionnés sur le visage d'un acteur durant une séance de captation optique de mouvements faciaux.
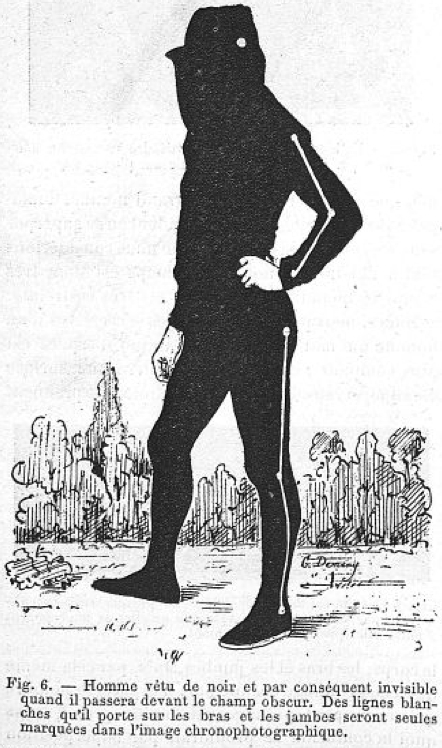
Plusieurs marqueurs positionnés sur le visage d'un acteur durant une séance de captation optique de mouvements faciaux.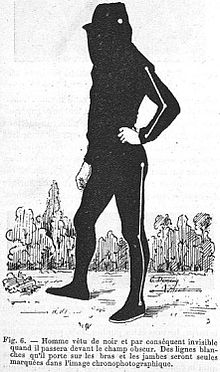 Une combinaison de chronophographie inventée par Étienne-Jules Marey en 1891. On peut voir les marqueurs sur la jambe, le bras et la tête.
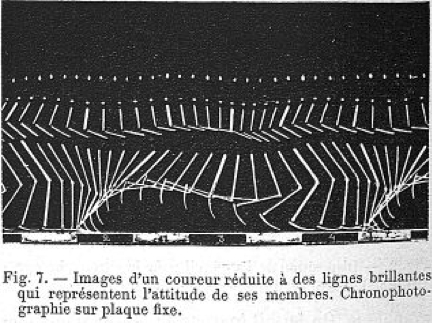
Une combinaison de chronophographie inventée par Étienne-Jules Marey en 1891. On peut voir les marqueurs sur la jambe, le bras et la tête. Le résultat de la chronophotographie avec la combinaison ci-dessus.
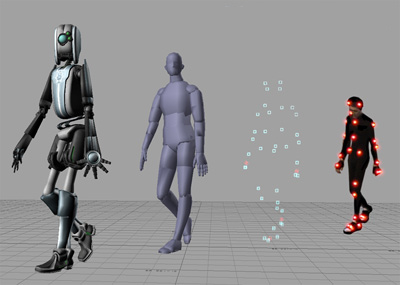
Le résultat de la chronophotographie avec la combinaison ci-dessus.La capture de mouvements, ou captation de mouvements, ou motion capture (parfois abrégé en mocap), est une technique permettant de capter les mouvements d'un élément réel afin de les renvoyer dans un univers virtuel : les mouvements sont enregistrés ou restitués en temps réel vers d'autres systèmes.
Cette technique, créée par Étienne-Jules Marey sous le nom de chronophotographie[1] pour analyser le mouvement, s'est initialement développée dans un cadre médical (orthopédie, traumatologie, rééducation, et, plus généralement, biomécanique). Elle est maintenant employée pour faire correspondre des mouvements du vivant à ceux d'un avatar ou d'une représentation conceptuelle, et est donc utilisée pour les films en trois dimensions, les décors virtuels de quelques émissions de télé, certains jeux vidéo et pour l'élaboration d'études scientifiques, ainsi que dans le domaine sportif (haut niveau, cependant cette pratique reste rare et n'est qu'à un stade peu avancé) et artistique (là aussi cette pratique reste rare).
C'est aussi la captation des mouvements de l'une des mains, ainsi que de certains des doigts qui permet d'utiliser un ordinateur : le clavier et la souris sont les premiers périphériques de « mocap ».
On distingue ainsi trois grands systèmes de captation des mouvements : les systèmes optiques, mécaniques et magnétiques.
Sommaire
Terminologie
Le terme de « capture » de mouvement vient d'une mauvaise traduction de l'anglais, car il s'agit de capter le mouvement, et non de le capturer.
Capture optique
Basée sur des caméras et marqueurs passifs réfléchissants
La capture optique est basée sur la prise de vue synchronisée de plusieurs caméras, la synthèse des coordonnées (x,y) d'un même objet vu sous différents angles permettant de déduire les coordonnées (x,y,z) de cet objet.
Cette méthode implique la prise en compte de problèmes optiques complexes comme la parallaxe, la distorsion des lentilles utilisées, etc. Le signal capté subit donc de nombreuses interpolations. En revanche, une calibration correcte de tous ces paramètres permet une grande précision des données récoltées.
Le principe de fonctionnement est analogue à celui des radars : les caméras émettent un rayonnement (en général rouge et/ou infrarouge), réfléchi par les marqueurs (dont la surface est composée d'une matière ultra réfléchissante) puis renvoyé à ces mêmes caméras. Celles-ci ne sont sensibles qu'à un type de longueur d'onde et visualisent les marqueurs sous forme des taches vidéos blanches (ou en niveau de gris pour les caméras les plus récentes). Le recoupement des informations de chaque caméra (2 caméras minimum donc) permet de déterminer la position du marqueur dans l'espace virtuel.
Article détaillé : Match moving.Basée sur des cellules photosensibles et marqueurs actifs
Avec ce type de technologie, la capture optique est basée sur la prise de vue synchronisée de 3 cellules photosensibles sur une même unité de mesure. La synthèse des coordonnées (x,y,z) se fait donc immédiatement en temps réel par une seule et même unité dont chaque cellule voit l'objet sous différents angles permettant d'en déduire ses coordonnées (x,y,z).
Cette méthode bien que moins sensible, prend en compte les problèmes optiques complexes comme la parallaxe, mais n'utilise pas de lentilles contrairement aux cameras. Le signal émis par des marqueurs actifs (micro-LED) est filtré à travers une paroi traitée à cet effet et plate (pas de problème de distorsion d'image) et capté directement par les cellules photosensibles en même temps. Aucune calibration n'est nécessaire, puisque les 3 cellules du système sont fixées d'origine dans une structure rigide puis pré-calibré à l'aide d'une batterie de tests dynamiques d'une redoutable précision après assemblage. Cette technique et les précautions qui entourent la mise en service de ces unités de mesure permettent le calcul des coordonnées 3D de chaque émetteur actif ou marqueur actif dans le volume de capture avec une très grande précision.
Le principe de fonctionnement est donc celui "d'émetteur-récepteur": Les marqueurs actifs émettent directement un signal infrarouge captés par les cellules photosensibles. Celles-ci ne sont sensibles qu'à un type de longueur d'onde et identifient les marqueurs actifs en temps-réel grâce à une séquence d'émission multicomplexe. Ces marqueurs sont donc identifiés automatiquement et immédiatement en temps réel comme étant des points dynamiques avec des coordonnées 3D dans l'espace virtuel.
Capture mécanique
La capture mécanique fonctionne grâce à un exosquelette construit autour de l'élément à capter, et dont chaque articulation est couplée à un codeur angulaire. La valeur de rotation du codeur est enregistré par un calculateur. En connaissant la position relative de chaque codeur, un logiciel est capable de reconstituer le mouvement complexe d'un squelette constitué en général de plusieurs articulations. On applique également un décalage pour chaque codeur, car il n'est souvent pas possible de faire coïncider exactement la position du codeur avec celle l'articulation réelle (surtout dans le cadre d'une capture d'un mouvement d'humain).
Si cette technique offre une grande précision et une grande rapidité, elle est cependant limitée par les contraintes mécaniques inhérentes à la mise en place des codeurs et de l'exosquelette. En effet, la liberté de mouvement n'est pas aussi importante qu'avec des systèmes de capture optique à boules réfléchissantes. De plus, ces exosquelettes utilisent souvent des connexions filaires qui relient les codeurs au calculateur. La précision de la reproduction d'un mouvement est de plus conditionnée par celle de la modélistation du squelette, qui résulte directement de la mesure des positions relatives entre chaque codeur.
Il faut d'autre part adapter la taille de l'exosquelette à chaque morphologie. Enfin un exosquelette pèse en général plus lourd que des boules réfléchissantes. La capture mécanique ne permet de reproduire que des mouvements relatifs entre codeurs, mais ne permet pas de positionner le squelette dans un univers de manière absolue. Il faut utiliser des méthodes de triangulation optique pour placer précisément l'animation dans un univers.
Il faut autant d'exosquelette de captation que d'objet (personnages) à animer, et il est peu aisé de mesurer les interactions entre plusieurs exosquelettes, ou si on veut par exemple faire interagir le personnage avec des objets, ou d'autre personnage.
Les avantages de la capture mécanique sont la précision de la mesure (un codeur optique peut comporter plusieurs centaines de milliers de traits par tour), la rapidité du fait de la connexion filaire, et l'insensibilité aux facteurs extérieurs. Elle est cependant peu adaptée pour la capture de mouvements humains.
Par contre elle convient bien à des systèmes robotiques où les éléments mobiles sont rigides, comme des bras ou têtes robotisées à plusieurs axes, ou à des systèmes immobiles dans l'espace (à cause de la contrainte de la connexion filaire)
Capture par centrales inertielles
La capture par centrales inertielles permet l'acquisition de l'attitude du corps humain en temps réel en supprimant les contraintes imposées par les technologies utilisant des caméras. Le système portatif peut être basé sur un ensemble de centrales inertielles MTx de la marque XSENS et du système Xbus, ou bien être constitué d'un réseaux de capteur MotionPod de la marque MOVEA, par exemple.
Capture magnétique
La capture magnétique repose sur la création d'un champ électro-magnétique en un point réel, qui aura pour coordonnées (0,0,0) en x, y et z dans sa représentation virtuelle, et que l'on nomme « antenne », ainsi que sur l'introduction de « capteurs » dans ce champ électro-magnétique.
Ces capteurs sont en fait des bobines de fils électriques perturbant le champ magnétique, et dont le calcul des différences de potentiel avec l'antenne traduit à la fois leurs positions et leurs orientations.
Le principal avantage de cette méthode est que les signaux captés sont très peu interprétés, aucune interpolation n'est effectuée hors du calcul même de la position et de l'orientation des capteurs. Cependant, tout objet métallique constituant une boucle (loop) inclus dans le champ, et plus généralement toute distorsion électro-magnétique, conduira à un « tremblement » des données captées, les rendant ainsi pratiquement inutilisables. Par contre, ces tremblements peuvent être éliminés assez facilement par l'utilisation de logiciels tels que "MotionBuilder".
Dans tous les cas
Dans tous les cas, on pose des marqueurs sur l'acteur à des endroits du corps caractéristiques, par exemple aux articulations, et ce sont les mouvements de ces marqueurs qui sont captés.
Il faut ensuite faire correspondre les deux univers, réel et virtuel, pour renvoyer ces données dans un squelette cohérent, le réalisme du mouvement étant aussi dépendant de la véracité de l'information captée que de la qualité du squelette sur lequel on l'applique.
Notes et références
- Étienne-Jules Marey, « La chronophotographie : nouvelle méthode pour analyser le mouvement dans les sciences physiques et naturelles », dans Revue générale des sciences pures et appliquées, no 2, 1891, p. 689-719 [texte intégral [PDF]]
Annexes
Articles connexes
- Biovision Hierarchy, un format de fichier de capture de mouvements,
- Bill l'extraterrestre, co-présentateur virtuel de télévision animé par captation de mouvements.
Catégories :- Effets spéciaux
- Technique de prise de vue
- Imagerie numérique
- Lexique et notions du jeu vidéo
- Animation 3D
Wikimedia Foundation. 2010.