- Transformation de Cayley
-
En mathématiques, la transformation de Cayley, nommée d'après Arthur Cayley, possède différentes significations voisines. La définition originale est celle d'une application entre les matrices antisymétriques et les matrices de rotation. En analyse complexe, la transformation de Cayley est une application conforme envoyant le demi-plan complexe supérieur sur le disque unité. Enfin, dans la théorie des espaces de Hilbert, c'est une application entre opérateurs linéaires.
Sommaire
Transformation matricielle
Soit A une matrice antisymétrique n×n à coefficients réels (donc telle que AT = −A), I la matrice identité (d'ordre n). Alors I + A est une matrice inversible, et la transformation de Cayley :
 fabrique une matrice orthogonale, Q (c'est-à-dire que QTQ = I). En fait, Q a pour déterminant 1, et est donc une matrice de rotation. Réciproquement, soit Q une matrice orthogonale n'ayant pas −1 pour valeur propre ; alors :
fabrique une matrice orthogonale, Q (c'est-à-dire que QTQ = I). En fait, Q a pour déterminant 1, et est donc une matrice de rotation. Réciproquement, soit Q une matrice orthogonale n'ayant pas −1 pour valeur propre ; alors : est une matrice antisymétrique. Cette condition sur Q exclut toutes les matrices orthogonales de déterminant −1, mais aussi certaines matrices de rotation. Certains auteurs utilisent "c" en exposant pour noter cette transformation, écrivant Q = Ac et A = Qc. Cette version de la transformation de Cayley est son propre inverse fonctionnel (une involution de l'ensemble des matrices A telles que I+A soit inversible), et donc A = (Ac)c et Q = (Qc)c. On rencontre parfois une forme légèrement différente, demandant deux application distinctes, et n'utilisant pas la notation en exposant : :
est une matrice antisymétrique. Cette condition sur Q exclut toutes les matrices orthogonales de déterminant −1, mais aussi certaines matrices de rotation. Certains auteurs utilisent "c" en exposant pour noter cette transformation, écrivant Q = Ac et A = Qc. Cette version de la transformation de Cayley est son propre inverse fonctionnel (une involution de l'ensemble des matrices A telles que I+A soit inversible), et donc A = (Ac)c et Q = (Qc)c. On rencontre parfois une forme légèrement différente, demandant deux application distinctes, et n'utilisant pas la notation en exposant : : Comme A commute avec (μI ± A)−1, l'ordre des facteurs ne change en revanche pas la transformation.
Comme A commute avec (μI ± A)−1, l'ordre des facteurs ne change en revanche pas la transformation.Exemples
Dans le cas 2×2, nous avons :
 La matrice de rotation d'un demi-tour, −I, est exclue, même si elle est obtenue comme limite lorsque tan θ⁄2 tend vers l'infini. Dans le cas 3×3, nous avons :
La matrice de rotation d'un demi-tour, −I, est exclue, même si elle est obtenue comme limite lorsque tan θ⁄2 tend vers l'infini. Dans le cas 3×3, nous avons :
 où K = w2 + x2 + y2 + z2, et où w = 1. On reconnaît la matrice de rotation correspondant au quaternion :
où K = w2 + x2 + y2 + z2, et où w = 1. On reconnaît la matrice de rotation correspondant au quaternion : (formule que Cayley avait publié l'année précédente), si ce n'est qu'elle est normalisée pour que w = 1 au lieu de la condition usuelle w2 + x2 + y2 + z2 = 1. Ainsi, le vecteur (x,y,z) est le vecteur unitaire de l'axe de rotation multiplié par tan θ⁄2. Les rotations d'un demi-tour sont à nouveau exclues ; dans ce cas, il s'agit des matrices Q qui sont symétriques.
(formule que Cayley avait publié l'année précédente), si ce n'est qu'elle est normalisée pour que w = 1 au lieu de la condition usuelle w2 + x2 + y2 + z2 = 1. Ainsi, le vecteur (x,y,z) est le vecteur unitaire de l'axe de rotation multiplié par tan θ⁄2. Les rotations d'un demi-tour sont à nouveau exclues ; dans ce cas, il s'agit des matrices Q qui sont symétriques.Autres matrices
La transformation s'étend aux matrices à coefficients complexes en remplaçant "orthogonale" par "unitaire" et "antisymétrique" par "antihermitienne", la transposition étant donc remplacée par la transposition conjuguée (·H). Cela revient à remplacer le produit scalaire réel standard par le produit scalaire complexe. En fait, nous pouvons généraliser davantage en prenant d'autres choix de matrice adjointe ; la définition ne demande en effet que l'inversibilité de I+Q, et donc il suffit que Q n'ait pas -1 pour valeur propre. Par exemple, on a
 On remarque que A est antisymétrique (respectivement antihermitienne) si et seulement si Q est orthogonale (respectivement unitaire) avec -1 non valeur propre.
On remarque que A est antisymétrique (respectivement antihermitienne) si et seulement si Q est orthogonale (respectivement unitaire) avec -1 non valeur propre.Application conforme
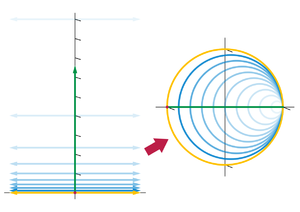 La transformation de Cayley du demi-plan supérieur vers le disque unité
La transformation de Cayley du demi-plan supérieur vers le disque unité
En analyse complexe, la transformation de Cayley est une fonction du plan complexe sur lui-même, donnée par :
 C'est une fonction homographique, qui peut être prolongée en un automorphisme de la sphère de Riemann (le plan complexe augmenté d'un point à l'infini). On remarquera en particulier que
C'est une fonction homographique, qui peut être prolongée en un automorphisme de la sphère de Riemann (le plan complexe augmenté d'un point à l'infini). On remarquera en particulier que- W est une application conforme du demi-plan supérieur de C sur le disque unité de C.
- W est une injection de la droite réelle dans le cercle unité T (les nombres complexes de module 1) ; l'image de R est T privé de 1.
- W est une bijection de la demi-droite des imaginaires i [0, ∞) sur l'intervalle semi-ouvert [−1, +1).
- W envoie 0 sur −1, −1 vers i, le point à l'infini vers 1 et i vers le point à l'infini (W possède un pôle simple en i)
- W laisse invariant 1⁄2(−1 + √3)(−1 + i) et 1⁄2(1 + √3)(1 − i).
Application entre opérateurs
En dimension infinie, les espaces euclidiens sont remplacés par des espaces de Hilbert, et on ne peut plus parler de matrices. Cependant, il reste possible de généraliser la transformation de Cayley aux opérateurs linéaires :
 , où le domaine de U, dom U, est (A+iI) dom A. Voir endomorphisme autoadjoint pour plus de détails[1].
, où le domaine de U, dom U, est (A+iI) dom A. Voir endomorphisme autoadjoint pour plus de détails[1].
Notes et références
- Pour la construction de tels endomorphismes utilisant la transformation de Cayley, se référer à l'article correspondant de la wikipédia anglophone(en).
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Cayley transform » (voir la liste des auteurs)
Wikimedia Foundation. 2010.