- Perspective axonometrique
-
Perspective axonométrique
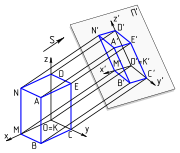
 commode en perspective axonométrique
commode en perspective axonométrique
Dans un certain nombre de situations, et notamment en dessin technique, le dessin est la représentation d'objets réels. Le lecteur du dessin doit pouvoir se représenter la pièce en volume à partir de sa représentation sur papier, en deux dimensions. Se pose alors le problème du passage trois dimensions → deux dimensions, qui est notamment le domaine de la perspective.
Dans l'espace, on peut choisir un point de référence et trois règles graduées ayant des directions distinctes (on les choisit en général perpendiculaires) et non coplanaires (c'est-à-dire que les trois règles ne sont pas dans le même plan). On peut alors repérer un point de l'objet à dessiner (par exemple un sommet) par trois nombres, appelés « coordonnées », qui sont la distance à parcourir selon les trois directions pour aller du point de référence au point visé.
Voir l'article Repérage dans le plan et dans l'espace.
Une perspective axonométrique est un dessin sur lequel :
- les trois axes de référence sont représentés par trois droites ;
- les longueurs mesurées sur les règles graduées (les coordonnées) sont reportées avec un facteur constant pour chacune des droites (mais ce facteur peut être différent d'une droite à l'autre).
Ainsi, le dessin est particulièrement simple à réaliser, que ce soit à la main ou par calcul informatique (infographie, dessin assisté par ordinateur, synthèse d'image 3D).
Sommaire
Perspective axonométrique et vision réelle
 Projection axonométrique
Projection axonométriqueLa vision réelle est mieux rendue avec une perspective conique. Avec les perspectives axonométriques, l'éloignement par rapport à l'observateur se traduit uniquement par un déplacement dans le plan. Il n'y a en particulier pas de diminution de taille des objets avec l'éloignement. Par contre, si l'objet représenté est peu profond, l'effet de rapetissement est peu important, une perspective axonométrique peut donc donner une bonne illusion de ce que verrait l'œil.
Tout le problème consiste à choisir des directions et des rapports qui rendent un dessin facilement interprétable par le lecteur — on s'imagine bien qu'en prenant des axes et des rapports au hasard, on obtiendrait un dessin peu « réaliste ».
Perspective axonométrique et arts plastiques
La peinture chinoise a beaucoup utilisé le dessin sans rapetissement avec l'éloignement. S'il ne s'agit pas de « construction à la règle », la notion est similaire.
Défauts des perspectives axonométriques
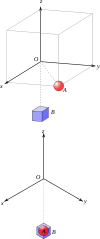 Illustration de l'erreur induite par la perspective
Illustration de l'erreur induite par la perspectiveComme toutes les projections et toutes les perspectives, la perte de la troisième dimension induit des erreurs possibles d'interprétation. Ceci a été abondamment utilisé par l'artiste M. C. Escher pour créer des situations impossibles.
Formalisme
Considérons un repère orthonormé direct
 , les vecteurs définissant respectivement l'axes des x, des y et des z. Les trois axes sont représentés par trois droites sur le plan (dessin), de vecteurs directeurs unitaires
, les vecteurs définissant respectivement l'axes des x, des y et des z. Les trois axes sont représentés par trois droites sur le plan (dessin), de vecteurs directeurs unitaires  ,
,  et
et  tels que :
tels que :- la représentation de
 est
est  ;
; - la représentation de
 est
est  ;
; - la représentation de
 est
est  .
.
Si l'on connaît les coordonnées (x, y, z) d'un point dans l'espace, alors le placement de ce point sur le plan de projection est particulièrement simple : il suffit de reporter ces coordonnées sur les axes projetés en appliquant les coefficients k1, k2 et k3.
Projections orthogonales
 Exemple de projection orthogonale
Exemple de projection orthogonaleLa projection orthogonale est une opération mathématique. Dans le cas qui nous intéresse, il s'agit de projeter un point de l'espace sur un plan, perpendiculairement à ce plan.
Par exemple, l'ombre créée par le Soleil, lorsque celui-ci est à la verticale de l'endroit où l'on se trouve, est une projection orthogonale de l'objet.
Les projections orthogonales sont des applications linéaires, ce qui signifie entre autres que deux vecteurs proportionnels restent proportionnels une fois projetés ; ce sont donc bien des perspectives axonométriques.
Si la projection peut se gérer simplement en infographie, la détermination des directions des axes projetés et des coefficients de proportionnalité pour le tracé manuel n'est pas très simple dans le cas général. On utilise de fait fréquemment des perspectives dimétriques pour lesquelles deux des coefficients sont égaux.
Détermination des directions des axes et des rapports
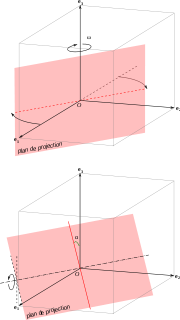 Rotations du plan de projection
Rotations du plan de projection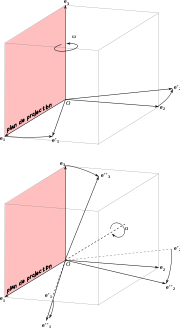 Rotations du repère ayant le même effet
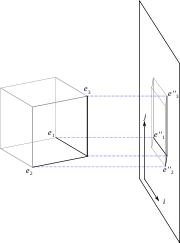
Rotations du repère ayant le même effetOn peut décrire le plan de projection par des rotations transformant un plan donné, par exemple le plan (Oxz). Si l'on s'impose que la projection de
reste verticale, alors on voit que le plan de projection peut s'obtenir par deux rotations, par exemple :- une rotation autour de l'axe (Ox) ;
- puis une rotation autour de la projection de (Oz) sur le plan.
On peut aussi procéder dans « l'ordre inverse » :
- une rotation autour de (Oz) ;
- puis une rotation autour de la trace du plan (Oxy) sur le plan de projection.
Voir aussi l'article Angles d'Euler.
C'est cette deuxième manière de faire que nous allons retenir. Remarquons que l'on obtient le même résultat en considérant que le plan de projection reste fixe, mais que c'est le repère qui tourne (avec des angles opposés). Considérons que le plan de projection est (Oxz). Si l'on opère une rotation autour de (Oz) d'un angle ω, les vecteurs de la base se transforment en :
Si l'on applique ensuite une rotation d'angle α autour de l'axe Ox initial (qui est bien la trace de (Oxy) sur le plan de projection) puis que l'on fait la projection sur le plan, on voit que,
 étant le repère orthonormé direct du plan de projection (transformé de
étant le repère orthonormé direct du plan de projection (transformé de  par les rotations si c'est le plan qui tourne, ou bien originel si c'est le repère qui tourne) :
par les rotations si c'est le plan qui tourne, ou bien originel si c'est le repère qui tourne) :- le vecteur se projette selon
 ;
; - le vecteur se projette comme lui-même ;
- la projection du vecteur est
 .
.
Les projections axes sont donc données par les vecteurs suivants, dont la norme est le coefficient de report :
- Ox :
 ;
; 
- Oy :
 ;
; 
- Oz :
 ; k3 = | cosα |
; k3 = | cosα |
Les angles des axes projetés
 et
et  par rapport à l'horizontale
par rapport à l'horizontale  peuvent se calculer à l'aide de la trigonométrie, par exemple :
peuvent se calculer à l'aide de la trigonométrie, par exemple :les angles étant ici non orientés.
Si x, y et z sont les coordonnées d'un point de l'espace dans le repère
, et x" et y" les coordonnées de son projeté dans le repère  , on peut définir la matrice P de la projection telle que
, on peut définir la matrice P de la projection telle que(voir l'article Produit matriciel), avec
et
Par exemple, pour ω = 30° et α = 20°, on a :
- k1 ≈ 0,88 ;
- k2 ≈ 0,58 ;
- k3 ≈ 0,94 ;
- (i, e"1 ) ≈ 11,17°
- (i, e"2 ) ≈ 30,64°
- x" ≈ 0,87·x - 0,50·y ;
- y" ≈ -0,17·x - 0,30·y + 0,94·z.
Perspectives dimétriques
Une perspective dimétrique est une perspective pour laquelle deux des rapports sont égaux.
Géométrie descriptive
Les vues en géométrie descriptive sont un cas particulier dans lequel deux des coefficients sont égaux à 1, et le troisième coefficient est égal à 0.
Ce sont également des projections orthogonales.
Perspective cavalière
Il s'agit d'une projection oblique et non d'une véritable axonométrie.
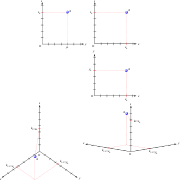
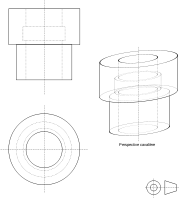 Les figures de gauche sont les vues en géométrie descriptive ; la figure de droite est une perspective cavalière avec un angle de 30° et un rapport de 0,5
Les figures de gauche sont les vues en géométrie descriptive ; la figure de droite est une perspective cavalière avec un angle de 30° et un rapport de 0,5Dans la perspective cavalière, deux des axes sont orthogonaux et ont un facteur de report de 1. Le troisième axe est incliné, en général de 30 ou 45° par rapport à l'horizontale, appelé « angle de fuite », et a un facteur de report inférieur à 1, en général 0,7 ou 0,5.
Voir l'article détaillé Perspective cavalière.
Projections orthogonales dimétriques
 Report des coordonnées pour placer un point sur une perspective dimétrique
Report des coordonnées pour placer un point sur une perspective dimétrique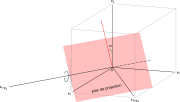 Plan de projection tournant autour de la deuxième bissectrice du plan xy
Plan de projection tournant autour de la deuxième bissectrice du plan xyChoisissons k1 = k2 ; les projections des axes x et y sont symétriques par rapport à la verticale. Cette situation est un cas particulier de la projection orthogonale avec ω = 45 ° ; on a cos ω = sin ω = √2/2, soit
- Ox :
 ;
;  ; (i, e"1 ) = arctan(sin α) ;
; (i, e"1 ) = arctan(sin α) ; - Oy :
 ; k2 = k1 ; (i, e"2 ) = (i, e"1 ) ;
; k2 = k1 ; (i, e"2 ) = (i, e"1 ) ; - Oz : ; k3 = | cosα | .
Le plan de projection tourne autour de la deuxième bissectrice du plan (Oxy), c'est-à-dire autour du vecteur
 .
.On a
et
Par exemple, pour α = 45 °, on a
- k3 ≈ 0,71 ;
- k1 = k2 ≈ 0,87 ;
- (i, e"1 ) ≈ 35,26 ° (vecteur e"1 dirigé vers le bas) ;
et pour α = -10 °, on a
- k3 ≈ 0,98 ;
- k1 = k2 ≈ 0,72 ;
- (i, e"1 ) ≈ 9,85 (vecteur e"1 dirigé vers le haut).
Perspective isométrique
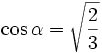
 les figures de gauche représentent les vues en géométrie descriptive ; la figure de droite représente une perspective isométrique avec une coupe
les figures de gauche représentent les vues en géométrie descriptive ; la figure de droite représente une perspective isométrique avec une coupeLa perspective isométrique est le cas particulier où les trois rapports sont égaux. Il s'agit d'une projection orthogonale.
On a :
- k1 = k3
soit
en utilisant le fait que cos²α + sin²α = 1, on obtient
et donc également
 soit
soit- Ox :
 ;
;  ; (i, e"1 ) = arctan(1/√3) = 30 ° ;
; (i, e"1 ) = arctan(1/√3) = 30 ° ; - Oy :
 ; k2 = k1 ; (i, e"2 ) = (i, e"1 ) ;
; k2 = k1 ; (i, e"2 ) = (i, e"1 ) ; - Oz :
 ; k3 = k1.
; k3 = k1.
Il s'agit donc d'un projection orthogonale dimétrique (ω = 45 °), pour laquelle on a α ≈ 35,26 ° et k1 = k2 = k3 ≈ 0,82.
et
soit
- x" ≈ 0,71·(x - y )
- y" ≈ -0,41·(x + y ) + 0,82·z
Voir l'article détaillé Perspective isométrique.
En synthèse d'image 3D
Projection orthogonale en synthèse d'image
On voit que si l'on connaît les coordonnées
X_3D,Y_3DetZ_3Ddu point dans l'espace, ses coordonnées sur l'écranX_2DetY_2D, en considérant une projection orthogonale, seront de la forme :X_2D = X_2D_0 + facteur*( A1*X_3D + A2*Y_3D )Y_2D = Y_2D_0 + facteur*( B2*(A2*X_3D - A1*Y_3D) + B1*Z_3D )
où
X_2D_0etY_2D_0sont des constantes permettant de « centrer » l'image, etfacteurest une constante d'échelle. Les constantesA1,A2,B1etB2caractérisent la direction des axes et les proportion des reports sur ces axes ; ils peuvent être définis par :A1 = cos(omega)A2 = sin(omega)B1 = cos(alpha)B2 = sin(alpha)
omegaetalphaétant des constantes (par rapport à l'étude précédente, le signe pour sin ω a changé, ce qui correspond à un changement du signe des angles, donc à la référence pour le sens de rotation). On peut aussi les définir sans relation avec les angles, de manière « empirique » (par exemple ajustés par essais-erreur pour obtenir un résultat « agréable »), comme étant compris entre -1 et 1 et vérifiant :A1^2 + A2^2 = 1B1^2 + B2^2 = 1
on peut ainsi ne définir que deux paramètres,
A1etB1, et calculer :A2 = sqrt(1 - A1^2)ouA2 = - sqrt(1 - A1^2)B2 = sqrt(1 - B1^2)ouB2 = - sqrt(1 - B1^2)
 Portail de la géométrie
Portail de la géométrie
Catégories : Géométrie | Dessin technique | Imagerie numérique



















Wikimedia Foundation. 2010.