- Méthode de la fausse position
-
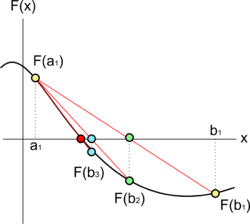 Étapes successives de la méthode regula falsi avec l'intervalle [a1;b1] comme point de départ. La racine de la fonction est le point en rouge.
Étapes successives de la méthode regula falsi avec l'intervalle [a1;b1] comme point de départ. La racine de la fonction est le point en rouge.
La méthode de la fausse position ou méthode regula falsi, en analyse numérique, est un algorithme de recherche d'un zéro d'une fonction qui combine les possibilités de la méthode de dichotomie et de la méthode de la sécante.
Sommaire
La méthode
Comme la méthode de dichotomie, la méthode de la fausse position commence par deux points a1 et b1 tels que f(a1) et f(b1) soient de signes opposés, ce qui implique d’après le théorème des valeurs intermédiaires que la fonction f possède au moins un zéro dans l’intervalle [a1, b1]. La méthode consiste à produire une suite décroissante d’intervalles [ak, bk] qui contiennent tous un zéro de f.
À l’étape k, le nombre
est calculé. Comme expliqué ci-dessous, ck est l’abscisse de l’intersection de la droite passant par (ak, f(ak)) et (bk, f(bk)) avec l'axe des abscisses, que nous appellerons pour simplifier zéro de la sécante. Si f(ak) et f(ck) sont de mêmes signes, alors nous posons ak+1 = ck et bk+1 = bk, sinon nous posons ak+1 = ak et bk+1 = ck. Ce procédé est répété jusqu’à ce que le zéro soit suffisamment approché.
La formule ci-dessus est également employée dans la méthode de la sécante, mais la méthode de la sécante retient systématiquement les deux derniers points calculés, alors que la méthode de la fausse position retient deux points qui encadrent certainement un zéro. D'autre part, la seule différence entre la méthode de la fausse position et la méthode de dichotomie est l’utilisation la relation ck = (ak + bk) / 2.
Recherche du zéro de la sécante
Étant donnés a et b, nous construisons la droite passant par les points (a, f(a)) et (b, f(b)), comme dans la figure ci-contre. Remarquons que cette droite est une sécante ou une corde du graphe de la fonction f. En utilisant la pente et un point, l’équation de la droite peut s’écrire
Nous déterminons maintenant c, l’abscisse du point d’intersection de cette droite avec l’axe des abscisses (zéro de la sécante) donnée par
La résolution de l’équation précédente donne ck.
Analyse
Si les valeurs initiales a0 et b0 sont prises telles que f(a0) et f(b0) soient de signes opposés, alors la méthode de fausse position convergera vers un zéro de f. La vitesse de convergence sera typiquement superlinéaire, ainsi plus rapide que la méthode de dichotomie, mais plus lente que la méthode de la sécante.
Histoire
Les documents les plus anciens ayant résisté au temps et témoignant de la connaissance et de la compréhension de la méthode de la fausse position remontent à une date estimée entre 200 av. J.-C. et 100. La méthode a été trouvée dans un texte chinois antique intitulé les neuf chapitres sur l'art mathématique (九章算術). Dans ce texte, cependant, les exemples de problèmes posés appliquent la méthode de la fausse position aux équations linéaires uniquement, et les solutions sont atteintes en seulement une étape.
En Occident, cette méthode a été beaucoup utilisée par les mathématiciens Fibonacci, Luca Pacioli Robert Recorde, et Galois[réf. nécessaire].
Références
- (en) Steven C. Chapra, Raymond P. Canale, Numerical methods for Engineers (fifth edition), 2006
- (en) Richard L. Burden, J. Douglas Faires (2000), Numerical Analysis, (7th Ed), 2000, Brooks/Cole. ISBN 0-534-38216-9
Lien externe




Wikimedia Foundation. 2010.