- Methode de Cholesky
-
Factorisation de Cholesky
La factorisation de Cholesky, nommée d'après André-Louis Cholesky, consiste, pour une matrice symétrique semi définie positive A, à déterminer une matrice triangulaire inférieure L tel que : A=LLT.
La matrice L est en quelque sorte une « racine carrée » de A. Cette décomposition permet notamment de calculer la matrice inverse A-1, de calculer le déterminant de A (égal au carré du produit des éléments diagonaux de L) ou encore de simuler une loi multinormale. Elle est aussi, utilisée en chimie quantique pour accélérer les calculs (voir Décomposition de Cholesky (chimie quantique)).
Sommaire
Exemple
La matrice symétrique A :
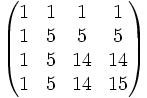
est égale au produit à droite de la matrice triangulaire L :
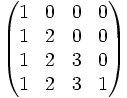
et de sa transposée LT.
Théorème
Factorisation de Cholesky d'une matrice :
Si A est une matrice symétrique définie positive, il existe au moins une matrice réelle triangulaire inférieure L telle que :
- A=LLT
On peut également imposer que les éléments diagonaux de la matrice L soient tous positifs, et la factorisation correspondante est alors unique.
Algorithme
On cherche la matrice :
De l'égalité A=LLT on déduit :
puisque lpq=0 si 1≤p<q≤n.
La matrice A étant symétrique, il suffit que les relations ci-dessus soient vérifiées pour i≤j, c'est-à-dire que les éléments lij de la matrice L doivent satisfaire :
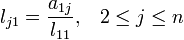
Pour i=1, on détermine la première colonne de L :
- a11 = l11l11 d'où

- a1j = l11lj1 d'où
On détermine la ième colonne de L
 , après avoir calculé les (i-1) premières colonnes :
, après avoir calculé les (i-1) premières colonnes : d'où
d'où 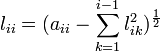
 d'où
d'où 
Il résulte du théorème précédent qu'il est possible de choisir tous les éléments lii>0 en assurant que toutes les quantités
sont positives.
Voir aussi
 Portail des mathématiques
Portail des mathématiques
Catégorie : Analyse numérique matricielle

Wikimedia Foundation. 2010.