- Mecanique spatiale
-
Mécanique spatiale
La mécanique spatiale, aussi dénommée astrodynamique, est, dans le domaine de l'astronautique, la science qui a trait à l'étude des mouvements. C'est une branche particulière de la mécanique céleste qui a notamment pour but de prévoir les trajectoires des objets spatiaux tels que les fusées ou les engins spatiaux y compris les manœuvres orbitales, les changements de plan d'orbite et les transferts interplanétaires.
Sommaire
Lois fondamentales
Les lois de Kepler
Les premières lois de mécanique spatiale furent découvertes expérimentalement par l'observation du mouvement des planètes par Kepler au début du 17e siècle. Elles constituent les lois du mouvement keplerien. Rappelons ici les principaux résultats :
- Première loi (1609) : Les orbites des planètes sont des ellipses planes dont le Soleil occupe l'un des foyers.
- Seconde loi (1609) : Loi des aires : Des aires égales sont balayées par le rayon vecteur joignant le Soleil à la planète en des intervalles de temps égaux.
- Troisième loi (1619) : Le rapport entre le cube du demi-grand axe a et le carré de la période T de révolution de la planète autour du Soleil est indépendant de la planète :

Elle peut aussi s'écrire mathématiquement :
où T est la période de l'orbite, a son demi-grand axe et μ = GMS, avec G constante de gravitation universelle et MS la masse du Soleil.
Ces lois sont encore utilisées avec une bonne approximation dans la plupart des calculs simples de mouvement orbitaux. Il s'agit du type de mouvement orbital de référence, et on calcule notamment des mouvements réalistes comme perturbations faibles d'un mouvement keplerien.
Mouvement à force centrale
Le mouvement keplerien est un mouvement à force centrale. Ceci implique notamment une loi de conservation de l'énergie qui s'écrit dans le cas de l'ellipse :
V est la vitesse du corps sur son orbite, r la distance entre le corps et le centre attracteur. Les autres notations sont identiques.
Paramètres orbitaux
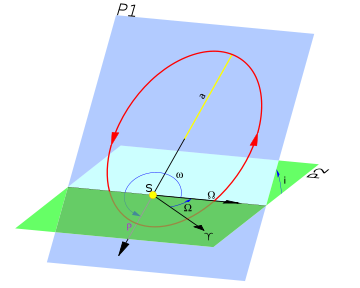 Paramètres orbitaux : le corps central S occupe un des deux foyers de l'ellipse de périastre P tracée sur le plan orbital P1. Le plan P2 est un plan de référence lié au système de coordonnées choisi (écliptique ou équatorial), tandis que γ représente le point vernal.
Paramètres orbitaux : le corps central S occupe un des deux foyers de l'ellipse de périastre P tracée sur le plan orbital P1. Le plan P2 est un plan de référence lié au système de coordonnées choisi (écliptique ou équatorial), tandis que γ représente le point vernal.
Plutôt que de décrire le mouvement d'un objet spatial par des coordonnées newtoniennes classiques, on va utiliser le fait que le mouvement se déroule sur une ellipse dans l'espace. On peut ainsi remplacer le jeu de 6 coordonnées newtoniennes classique
 par un jeu de 6 nombres appelées paramètres orbitaux :
par un jeu de 6 nombres appelées paramètres orbitaux :- a le demi-grand axe de l'orbite
- e l'excentricité de l'orbite
- i l'inclinaison de l'orbite
- Ω la longitude du nœud ascendant
- ω l'argument du périastre
(périhélie dans le cas du Soleil, périgée dans le cas de la Terre) - Un nombre permettant de repérer la position sur l'orbite, au choix :
- ν anomalie vraie, ou
- E anomalie excentrique, ou
- M anomalie moyenne.
Il existe des formules explicites permettant de passer entre ces 2 jeux de coordonnées (référence à venir).
Les paramètres orbitaux des objets (satellites et débris spatiaux) en orbite terrestre sont suivis en permanence et publiés dans un format standard (voir TLE, Two-Line Elements).
Les repères en mécanique spatiale
Pour décrire une orbite à l'aide des paramètres orbitaux, le référentiel galiléen choisi sera géocentrique ; ses axes sont l’axe Nord-Sud de la Terre, fixe en première approximation, l’axe vernal (l’intersection entre le plan équatorial et le plan de l’écliptique à un instant donné) et le dernier tel que les trois forment un repère orthonormé direct.
Le mouvement keplérien perturbé
Les calculs standards en mécanique spatiale se réalisent dans un cadre keplérien, où en particulier, on suppose que la seule force agissant sur le véhicule est l'attraction terrestre, et que la Terre est sphérique et homogène. Ces deux hypothèses sont fausses en réalité ; l'expérience montre néanmoins que les accélérations causées par les forces autres que l'attraction centrale sont faibles devant l'accélération keplérienne. C'est pourquoi on considère que les autres forces sont des perturbations du mouvement.
Les forces de perturbations
Forces gravitationnelles
Ces forces ne dépendent que la répartition des masses autour du satellite, et dérivent d'un potentiel de position. Notons U ce potentiel.
Potentiel terrestre
Dans le cas keplérien, la Terre est sphérique, et le potentiel terrestre se calcule simplement, et vaut
 . Dans le cas réel, le volume d'intégration est beaucoup plus complexe. Pour avoir une forme exploitable, on écrit ce potentiel sous la forme d'harmoniques sphériques, et on obtient :
. Dans le cas réel, le volume d'intégration est beaucoup plus complexe. Pour avoir une forme exploitable, on écrit ce potentiel sous la forme d'harmoniques sphériques, et on obtient :Dans cette expression, req est la rayon équatorial terrestre, Jn est une constante inertielle de la Terre appelée harmonique zonal d'ordre n, Cnm et Snm sont également des constantes d'inertie appelées harmoniques tesseraux, Pn est le polynôme de Legendre d'ordre n, Pnm la fonction de Legendre propre associée. r, λ et φ sont le rayon-vecteur, la latitude et la longitude du point où l'on calcule le potentiel.
Le premier terme de ce développement, J2, traduit l'aplatissement aux pôles. Ce terme a une intensité relative de 10 − 3 par rapport au potentiel keplérien, tandis que les termes suivants sont en 10 − 6.
Attraction due à la Lune ou au Soleil
En prenant un repère dans lequel le véhicule a pour coordonnées (x,y,z) et le nouveau corps attracteur, Lune ou Soleil, (x',y',z'), alors le potentiel supplémentaire dû à ce corps s'écrit :
avec :
L'ordre de grandeur rapporté au potentiel keplérien est de 10 − 8 dans le cas du Soleil et de 10 − 7 pour la Lune.
Forces non-gravitationnelles
Ces forces, contrairement aux précédentes, ne dérivent pas d'un potentiel. On va donc cette fois calculer les accélérations induites par ces forces.
Le frottement atmosphérique
Cette force est due à l'interaction entre l'atmosphère et le véhicule. Vu les hautes vitesses des engins satellisés, malgré la faible densité de l'atmosphère à ces altitudes, on ne peut négliger cette force qu'à partie de 1500 km d'altitude.
La force créée le long de l'axe de la vitesse de l'engin, qui sera donc opposée à cette vitesse, s'écrit :
Dans cette relation, ρ est la densité de l'atmosphère, S une surface de référence, Vr la vitesse du véhicule par rapport à l'atmosphère, Cx le coefficient de traînée du véhicule et m sa masse.
Il existe également des forces de nature similaire selon les autres axes de coordonnées (forces de portance par exemple) mais leurs effets sont en général plus faibles. Selon l'altitude, cette force de frottement a des intensités rapportées à celle du potentiel keplérien de 10 − 4 à 10 − 9.
Pression de radiation solaire
Cette force est due à l'interaction des photons avec le véhicule. L'accélération due à la pression de radiation directe venant du Soleil peut s'écrire :
ε est un coefficient valant 1 si le satellite est éclairé et 0 sinon, S est une surface de référence, P0 la pression de radiation solaire directe par unité de surface, valant en moyenne 4,63.10 − 6N.m − 2, Cp le coefficient de réflexivité, de l'ordre de 1,5,et
 le vecteur unitaire de la direction Soleil-véhicule.
le vecteur unitaire de la direction Soleil-véhicule.Les équations du mouvement perturbé
Équations de Lagrange
Équations de Gauss
Les manœuvres orbitales
Le principe général des manœuvres est de modifier un ou plusieurs paramètres orbitaux à l'aide des moyens de propulsion de l'objet spatial considéré.
Force de poussée et variation de masse de l'engin
Dans le cas d'une propulsion avec moteur à ergol, la force de poussée peut s'écrire :
 est le débit de matière entrant, g0 la constante de gravitation, et Isp l'impulsion spécifique.
est le débit de matière entrant, g0 la constante de gravitation, et Isp l'impulsion spécifique.Fréquemment, lors des manœuvres, cette poussée s'effectue pendant un temps négligeable devant la période de l'orbite. On peut alors faire l'hypothèse de poussée impulsionnelle : on considère alors que cette poussée se produit de façon instantanée. Cette hypothèse permet d'utiliser l'équation de Tsiolkowski pour approximer la variation de masse d'ergol pendant la manœuvre :
Dans ce cas ΔV est la variation du module de la vitesse pendant la manœuvre et m0 la masse initiale d'ergol.
Modification de la forme de l'orbite
On cherche à modifier les paramètres de forme a et e, de façon à minimiser l'ergol consommé. On montre que pour un Δa donné, ΔV est minimum si la poussée est colinéaire à la vitesse et la vitesse est maximale.
On réalise donc les manœuvres au périastre, qui remplit les 2 conditions. Les manœuvres optimales de modification de la forme de l'orbite consistent alors à modifier l'aopastre.
Un exemple d'orbite de transfert utilisant cette manœuvre optimale est l'orbite de Hohmann.
Modification du plan de l'orbite
On cherche cette fois à modifier les paramètres i et Ω. Si l'on souhaite modifier i uniquement, il s'agit d'effectuer la manœuvre au niveau du nœud ascendant ou descendant, pour faire tourner l'orbite autour de cette ligne. Si on veut passer de l'inclinaison i1 à l'inclinaison i2, on montre que la variation de vitesse nécessaire s'écrit :
V0 est alors la vitesse au nœud de manœuvre.
Les modifications de Ω sont quant à elles complexes et coûteuses.
Références
- Droit français : arrêté du 20 février 1995 relatif à la terminologie des sciences et techniques spatiales.
- B.Escudier, J-Y Pouillard, Mécanique spatiale, ENSAE Toulouse, Toulouse, 1997 (réimpr. 1996, 1997), 111 p. (ISBN 2-84088-028-8).
- O.Zarrouati, Trajectoires spatiales, CNES - Cépadues Editions, Toulouse
- M-N.Sanz, A-E.Badel, F.Clausset, Physique - Tout-en-un 1ere année, Dunod - J'intègre, Paris, 2002-2003, 725 p. (ISBN 2-10-007950-6)
Voir aussi
 Portail de l’astronautique
Portail de l’astronautique Portail de la physique
Portail de la physique
Catégorie : Mécanique spatiale







Wikimedia Foundation. 2010.