- Linéarisation Équivalente
-
Linéarisation équivalente
De nombreux problèmes de dynamique basés sur la deuxième loi de Newton aboutissent à une équation du deuxième ordre que l'on peut mettre sous la forme

On la supposera symétrique : l'excitation f(t) est centrée tandis que la fonction g est impaire par rapport à ses deux paramètres position et vitesse.
Ce type d'équation ne possède, sauf exception, de solution explicite que lorsqu'elle est linéaire (voir Équation différentielle linéaire d'ordre deux) :

Dans le cadre de l'hypothèse des petits mouvements il est possible d'obtenir une telle équation en négligeant simplement tous les termes d'ordre supérieur au premier. Si cette hypothèse est trop grossière, la linéarisation équivalente ou linéarisation optimale donne une meilleure approximation.
Sommaire
Principe
La raideur K et le coefficient d'amortissement linéaire B étant a priori inconnus, l'idée consiste à exprimer l'erreur comme la différence entre les termes des deux équations
 ,
,On minimise alors le carré de sa moyenne quadratique
 en annulant ses dérivées par rapport à B et K, ce qui fournit deux équations en B et K.
en annulant ses dérivées par rapport à B et K, ce qui fournit deux équations en B et K.Ces équations permettent d'exprimer les deux inconnues en fonction des caractéristiques de la réponse. Par ailleurs, en utilisant l'équation linéarisée, le calcul de cette réponse en fonction de B et K permet d'obtenir finalement une équation algébrique qui donne une valeur généralement approchée de la solution.
Cette méthode s'utilise dans deux cas particuliers, celui de l'excitation sinusoïdale et celui de l'excitation par un processus aléatoire gaussien. Le calcul des moyennes est évidemment différent mais le principe de la méthode peut s'exposer dans les deux cas en représentant une moyenne par la grandeur surlignée, indépendamment du calcul exact de cette moyenne.
Équations en B et K
C'est une méthode des moindres carrés tout à fait classique : on annule par rapport à B et K les dérivées de l'expression de l'erreur pour obtenir les deux équations :


 représente la moitié de la dérivée par rapport au temps de
représente la moitié de la dérivée par rapport au temps de  qui est nulle du fait de la symétrie supposée au début.
qui est nulle du fait de la symétrie supposée au début.Les équations qui donnent les valeurs des coefficients en fonction de la réponse se réduisent donc à

Pour finir de résoudre le problème il faut calculer la réponse de l'équation linéarisée en fonction des coefficients mais auparavant il est bon d'expliciter les forces couramment rencontrées.
Cas des forces de rappel et d'amortissement les plus courantes
Une force de rappel s'exprime plus souvent par un développement limité que par une fonction mathématique plus élaborée. La fonction étant impaire, elle s'écrit donc :
d'où
En ce qui concerne l'amortissement, il existe trois sortes d'amortissements classiques (voir Systèmes oscillants à un degré de liberté), le frottement sec, l'amortissement linéaire et l'amortissement quadratique. Pour la description de la méthode il est commode de les regrouper dans un seul terme bien qu'il soit peu vraisemblable qu'ils agissent simultanément. On obtient ainsi :

Le coefficient d'amortissement équivalent s'écrit
On peut remarquer que la raideur équivalente ne faisait également intervenir que les valeurs absolues.
Excitation sinusoïdale
À l'équation

on substitue l'équation linéaire

dont la solution est de la forme

Calcul de B et K en fonction de la réponse
En reportant ces dernières expressions dans les formules qui définissent B et K et en tenant compte des symétries, le calcul de toutes les quantités se ramène à celui d'intégrales de la forme
c'est-à-dire de fonctions Beta.
Tous calculs faits, on obtient la raideur
et le coefficient d'amortissement

Solution du problème
L'amplitude X de la réponse est donnée en fonction de F et de ω par l'équation

Excitation gaussienne
Dans ce cas, le second membre est un processus aléatoire F(t) représentant une infinité de signaux. La solution de l'équation est elle-même un processus X(t) constitué par une infinité de signaux :

Si le processus F(t) est gaussien, l'équation linéarisée

a pour solution un processus également gaussien de densité de probabilité

Des calculs effectués en utilisant l'ergodicité pour remplacer les moyennes temporelles par les moyennes statistiques conduisent à des coefficients de raideur et d'amortissement équivalents que l'on peut calculer comme précédemment. La fin du calcul ressemble à celle du cas sinusoïdal mais nécessite en général une série d'itérations.
Si la non linéarité ne porte que sur la force de rappel et si l'excitation peut être assimilée à un bruit blanc, l'équation de Fokker-Planck donne une solution exacte, ce qui est généralement impossible avec l'excitation sinusoïdale. Dans le cas d'un amortissement non linéaire il n'est plus possible de trouver une solution exacte mais seulement une approximation meilleure que celle de la linéarisation.
Exemple
L'équation différentielle

a été résolue en utilisant
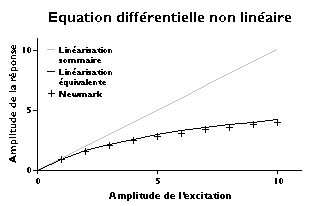
- une linéarisation sommaire négligeant le terme cubique,
- la linéarisation équivalente,
- la technique numérique de Newmark.
Dans ce cas (une plus forte non-linéarité donnerait évidemment des résultats plus discutables), les résultats de la linéarisation se comparent très raisonnablement avec ceux de la simulation.
 Portail des mathématiques
Portail des mathématiques Portail de la physique
Portail de la physique
Catégorie : Équation différentielle
Wikimedia Foundation. 2010.