- Equilibre du navire
-
Équilibre du navire
Sommaire
Équilibre statique
Pour expliquer l'équilibre d'un navire sur l'eau il est nécessaire de définir deux notions importantes : le centre de carène et le centre de gravité.
La carène étant la partie immergée de la coque d'un navire, le centre de carène est le centre géométrique du volume immergé (volume du fluide déplacé), la position du centre de carène varie avec les tirants d'eau (l'enfoncement), l'assiette et la gîte.
L'équilibre du navire est conditionné par les positions respectives de ces deux points. De celles-ci en découleront la gîte, l'assiette et la stabilité initiale.
 Stabilité transversale
Stabilité transversale
Les conditions nécessaires pour que le navire soit en équilibre sont:
- Le déplacement (son poids) du navire doit être égal à la poussée d'Archimède.
- les deux forces (poids et poussée d'Archimède) sont sur la même verticale.
- Le centre de gravité doit se trouver au dessous du métacentre de carène.
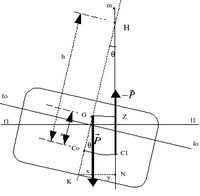
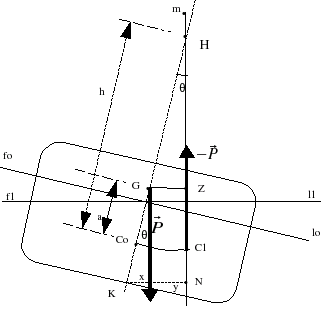
Lorsque le navire s'incline sous l'effet d'une force extérieure, le centre de carène se déplace de Co en C1,( on considère que pour de petites inclinaisons, le centre de carène décrit une portion d'arc de cercle de centre m, point que l'on appelle métacentre de carène. On peut l'assimiler à un centre de rotation instantané relatif à une inclinaison donnée. On nomme le point H point métacentrique. On notera que H est à une distance finie lorsque l'inclinaison est nulle.)
Le rayon de ce cercle peut être calculé par la formule de Bouguer :

IΔ est le moment quadratique de la surface de flottaison par rapport à son axe d'inclinaison (exprimé en m⁴) et V le volume de carène (exprimé en m³).
Il se forme un couple de redressement de moment M = P * GZ tendant à faire retrouver au navire sa position initiale droite. P est le déplacement et GZ le bras de levier.
On peut remarquer que plus G sera haut et se rapprochera de m, plus le bras de levier de redressement GZ sera faible. Lorsque GZ sera nul il n'existera pas de bras de levier de redressement, le navire continuera à s'incliner, ou du moins sera en équilibre instable. Lorsque G est au dessus de m , le bras de levier sera inclinant et augmentera l'inclinaison, jusqu'à atteindre une position d'équilibre qui peut être à 180° (à l'envers). La position du centre de gravité du navire (G) doit être surveillée. Un chargement dans les hauts fera monter G, un chargement dans les bas fera descendre G. Un navire commencera donc, de manière générale, par charger dans les fonds avant de charger dans les compartiments supérieurs. La valeur de GM est sujette à des règlementations (Solas), entre autres: un minimum de l'ordre de 0,30 m voire 0,45 m pour certains navires.
Dans le triangle GZH rectangle en Z: GZ = GH * sinθ, et aussi GZ = (h − a) * sinθ
Le moment du couple de redressement peut donc s'écrire:M = P * (h − a) * sinθ.
On définit le module de stabilité initial transversal MSIT = P * (r − a) ou r représente le h pris dans le domaine de la stabilité transversale uniquement.
On définira le module de stabilité initial longitudinal MSIL = P * (R − a) ou R représente le h pris dans le domaine de la stabilité longitudinale uniquement.
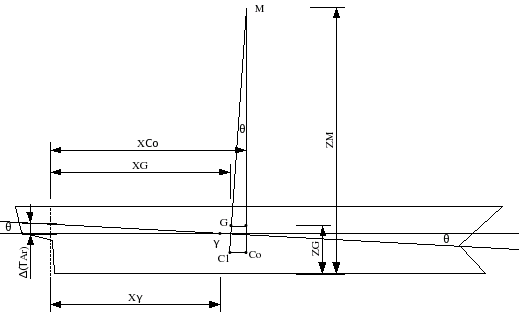
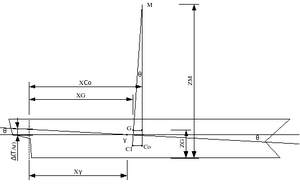 Stabilité longitudinale
Stabilité longitudinaleÉquilibre dynamique
Voir aussi
Liens internes
Liens externes
 Portail du monde maritime
Portail du monde maritime
Catégorie : Architecture navale
Wikimedia Foundation. 2010.