- Degré De Liberté (Mécanique)
-
Degré de liberté (mécanique)
 Pour les articles homonymes, voir Degré de liberté.
Pour les articles homonymes, voir Degré de liberté.Un solide rigide isolé dans l'espace peut se déplacer librement dans un mouvement qu'on peut décomposer suivant 6 transformations géométriques indépendantes (translations et rotations autour d'axes fixes dans les trois directions d'une base liée à notre espace à 3 dimensions). Il en est de même d'un solide isolé par rapport à un autre référent.
Si ces solides sont liés mécaniquement, certains de ces mouvements élémentaires sont supprimés. On appelle degrés de liberté dans une liaison, les mouvements indépendants qui restent possibles.
Pour chaque type de liaison considérée, il résulte une combinaison différente des degrés de liberté, dépendant complétement de la géométrie des contacts de liaison.
Cette notion est largement employée pour l'étude des dispositfs de mise en position de pièces sur les machines outils, l'objectif étant de solidariser complètement la pièce avec la machine avec une dispersion la plus faible possible.
Sommaire
Les degrés de liberté
 6 degrés de liberté
6 degrés de liberté
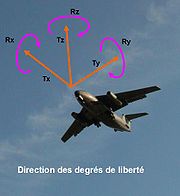
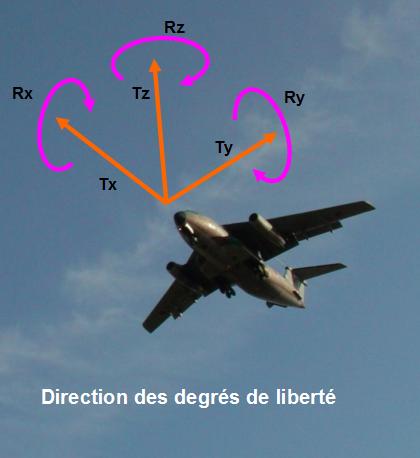
Les 6 mouvements considérés sont trois translation et trois rotations de directions indépendantes (constituant une base vectorielle).
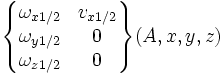
Si on s'oriente dans l'espace à l'aide d'un repère orthonormé (O,x,y,z) les six degrés de liberté s'expriment ainsi :
Degré axe sur machine outil mouvement pour un véhicule Tx Longitudinal avance Ty transversal dérive Tz vertical ascension Rx - roulis Ry - tangage Rz - lacet Dans le cas des machines outils, l'orientation des axes est définie par convention. Les noms des déplacements d'un avion ou d'un bateau correspondent si on considère un repère orienté comme sur l'image, c'est à dire X dans la direction de progression, et Z à la verticale.
Matrice des degrés de liberté
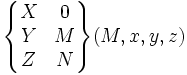
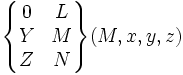
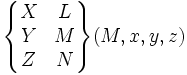
La présentation des degrés de liberté prend souvent la forme d'un tableau (ou matrice) donnant par colonne un type de mouvement (translation ou rotation) et par ligne la direction considérée (x, y ou z). Cette notation autorise des comparaisons rapides avec les torseurs d'action mécanique transmissible dans une liaison, ou le torseur cinématique de la même liaison. Cependant, l'absence de point de référence ne permet pas d'interchanger l'un et l'autre.
Cette matrice est plus souvent associée à une liaison mécanique qu'à un solide, c'est-à-dire à un solide vu par un autre solide référant. Et ce n'est que dans ce contexte que le rapprochement avec les torseurs pourra être fait sans trop d'erreurs.
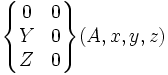
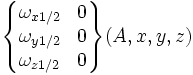
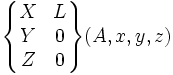
Matrice des degrés de liberté :
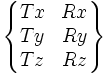
Lorsqu'un degré de liberté est supprimé, on remplace son mnémonique par O (zéro).
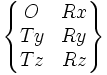
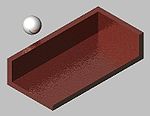
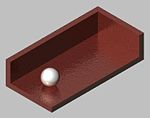
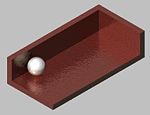
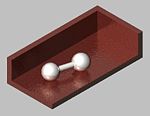
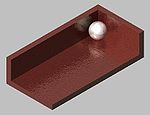
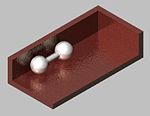
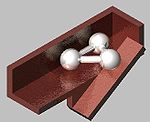
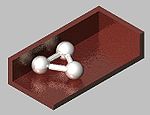
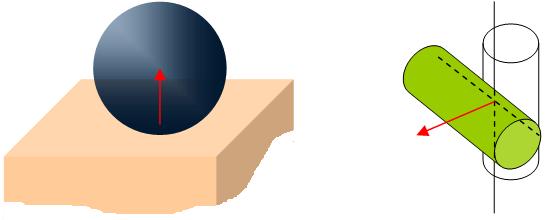
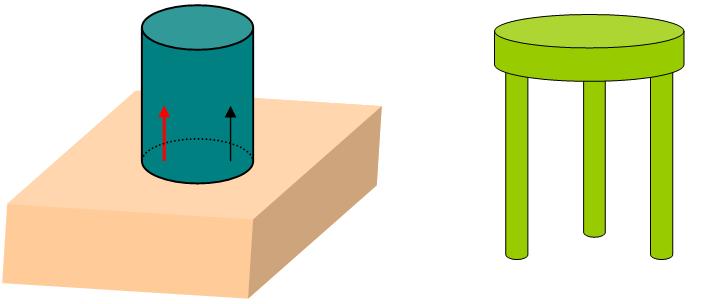
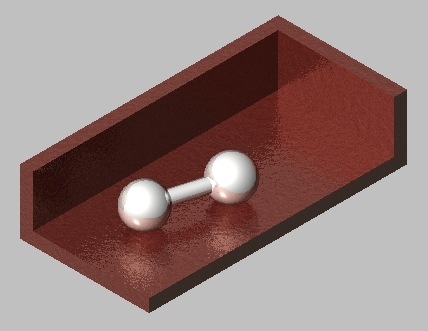
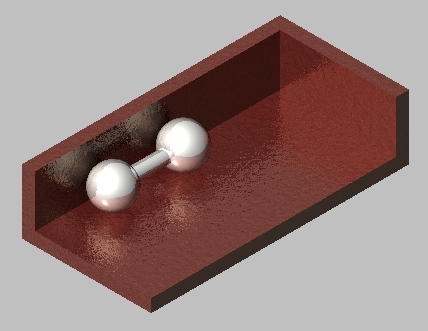
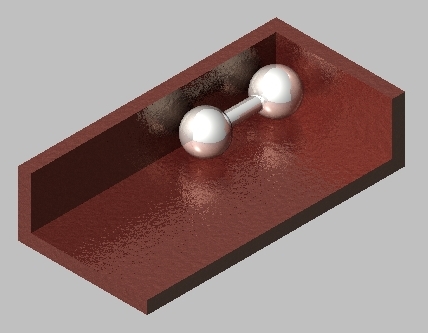
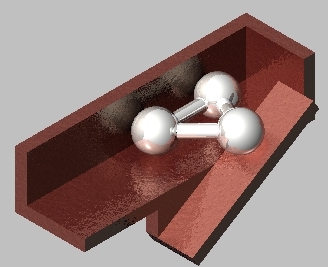
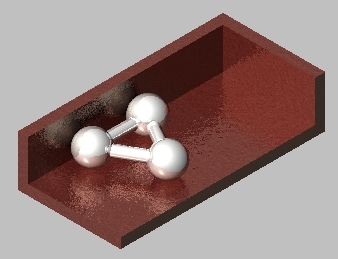
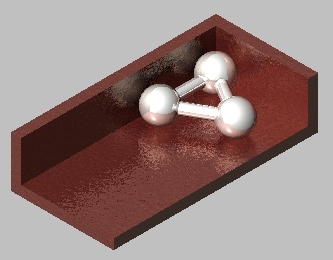
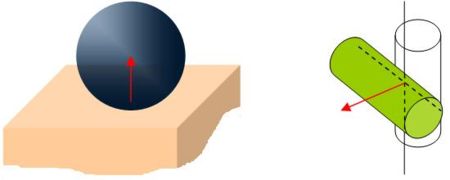 Cas de liaison ponctuelle. La flèche rouge donne la direction principale de la liaison.
Cas de liaison ponctuelle. La flèche rouge donne la direction principale de la liaison.Dans l'exemple d'une liaison ponctuelle, on définit le repère local associé à la liaison: le point de contact A est centre du repère; le vecteur
 étant normal au plan tangent, les deux autres directions
étant normal au plan tangent, les deux autres directions  et
et  peuvent être prises quelconques dans le plan normal à .
peuvent être prises quelconques dans le plan normal à .- Liaison ponctuelle en A suivant X
Degrés de liberté et degrés de liaison
En réalité, il est plus intéressant de considérer les degrés de liberté supprimés plutôt que ceux autorisés. On appelle degré de liaison tout degré de liberté supprimé. Il correspond à une direction d'effort transmissible. Ainsi une liaison complète, qui solidarise deux pièces, est celle interdisant tout mouvement, alors que la liaison nulle n'a aucun effet.
Le nombre de degrés de liaison est donc le complément (à 6) du nombre de degrés de liberté. La liaison ponctuelle, génératrice de toutes les autres possède donc 1 degré de liaison.
Lors de la conception d'un mécanisme, le choix d'une liaison peut se faire sur les degrés de liaison (aspect transmission), sur les degrés de liberté (aspect guidage) ou sur les deux à la fois. Le choix sera en plus motivé par des conditions d'hyperstatisme et donc de coût lié à la précision requise.
Par exemple le piston d'un moteur à explosion, doit pouvoir translater librement le long de son axe: une liaison glissière, pivot glissant ou linéaire annulaire avec le bloc moteur sera satisfaisante (cinématiquement). De même une porte à 2 deux gonds est plus facile à remettre en place qu'une disposant de trois gonds. Cela provient du fait que les axes des (3) gonds ne peuvent pas être parfaitement alignés.
Torseurs associés à la liaison
En mécanique du solide, le comportement statique et cinématique d'une liaison peut être modélisé par l'outil mathématique torseur.
En général, pour les mouvements cinématiquement admissibles, la puissance des efforts de liaison sont non nuls (d'où l'apparition d'échauffements). La liaison est dite parfaite si la puissance des efforts de liaison est nulle pour tous les mouvements cinématiquement admissibles. Il s'agit d'une modélisation idéale qui dans la réalité est plus ou moins réalisée.
Dans tout ce qui suit, les liaisons sont supposées parfaites.
- Le torseur d'action transmissible.
Lorsque deux pièces sont liées, certains mouvements relatifs sont interdits. Il en résulte l'existence d'efforts dans ces directions. Ces efforts sont dits transmissibles dans la liaison. Leur valeur ne dépend en fait que des autres actions extérieures aux deux pièces considérées.
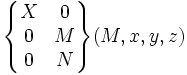
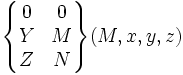
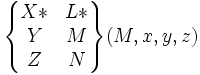
Dans le cas de la liaison ponctuelle, par exemple en A de normale de contact suivant X, le contact maintenu permet l'application d'une force dont la direction est normale au contact. Le torseur d'action mécanique du solide 1 sur le solide 2, exprimé en A et dans la même base (
,,) prend la forme :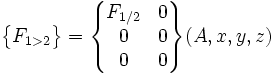 à comparer avec
à comparer avec Ce qui signifie que seule une force dans la direction du degré de liberté supprimé peut être transmise. Lorsque le point est bien choisi, la matrice des degrés de liberté est complémentaire de la forme du torseur d'effort transmissible dans la liaison parfaite. Si on change de point de réduction du torseur, cela n'est peut-être plus vrai.
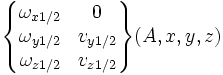
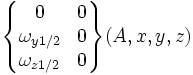
- Le torseur cinématiquement admissible.
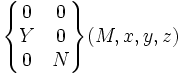
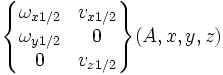
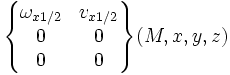
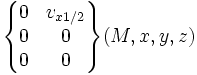
Les deux pièces en liaison peuvent bouger suivant les degrés de liberté (seules directions admissibles). Le champ admissible des vitesses du solide 1 par rapport au solide 2, s'exprime alors par un torseur cinématique de la forme:
 =
= 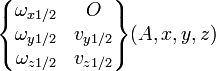 à comparer avec
à comparer avec Les ωi représentent les taux de rotation autour des axes x, y et z, ou les composantes du vecteur taux de rotation de 1 par rapport à 2. Les vi sont les composantes de la vitesse (vecteur) du point A considéré appartenant à 1 mobile par rapport à 2. Ce torseur inverse les colonnes (translation et rotation); les vecteurs vitesse constituent en effet les moments (situés alors à droite) du torseur cinématique alors que le taux de rotation en est la résultante. Il faut donc le comparer à la matrice des degrés de liberté après avoir opéré une symétrie verticale. Là aussi, le choix du point de réduction est important.
- Dualité entre les torseurs statique et cinématique
La dualité entre le torseur d'effort transmissible dans une liaison et le torseur cinématique admissible de la liaison provient du fait que si elle est parfaite, la puissance des inter-efforts est nulle. Cette puissance se calcule par le co-moment des torseurs, qui n'est autre que la somme des produits des termes des deux torseurs relatif à un même degré.

soit en développant:

Les degrés de liberté étant indépendants (sauf dans le cas de la liaison hélicoïdale où 2 sont liés par une relation géométrique) cette somme ne s'annule que si chaque terme est nul. Donc lorsque le degré de liberté existe (V non nulle) la force est nulle et réciproquement. Ce qui explique qu'on peut s'appuyer sur la matrice des degrés de liberté pour vérifier la forme préalable de ces torseurs.
Enfin un calcul d'équilibre ou de déplacement conduira certainement à l'annulation de certains termes (effort effectivement transmis ou mouvement réellement suivi). Ce qui ne remet pas en cause la forme initiale des torseurs ou de la matrice des degrés de liberté.
Les liaisons cinématiques
Lorsque deux solides (deux pièces en mécanique) sont en contact, il en résulte la disparition de certains degrés de liberté pour les deux pièces. La combinaison des degrés de liberté éliminés constitue une carte d'identité de la liaison mécanique ainsi créée.
Si on considère, en plus la liaison nulle, il existe 12 liaisons mécaniques différentes réalisables en deux solides par contact direct.
Degré de liaison et liaison par ponctuelles associées
Une liaison mécanique est la mise en relation de deux pièces par contact, c'est à dire qu'elles disposent, à un instant donné, d'un ensemble de points de tangence. Chaque point de contact est associé à une liaison ponctuelle élémentaire, caractérisée par le point de contact et sa normale.
Une liaison réelle est l'association d'une infinité de ponctuelles, et dont les caractéristiques dépendent de la répartitions des normales de contact. A partir d'un ensemble discrèt de points, on peut reconstituer l'ensemble des liaisons mécaniques. On constate alors que dans chaque cas, la solution minimale requiert un nombre de ponctuelles égal au nombre de degrés de liaison (voir aussi le tableau ci-dessous).
Isostatisme et Hyperstatisme dans une liaison.
Une liaison mécanique réelle résulte souvent de l'association de plusieurs liaisons théoriques (jeu de surfaces de contact). Chaque liaison élémentaire apporte donc des degrés de liaison. Il est possible qu'un même degré de liaison soit plusieurs fois amené. Dans ce cas le système est dit hyperstatique.
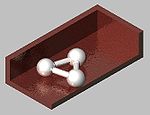
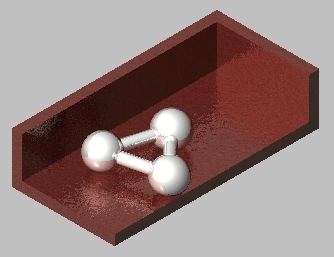
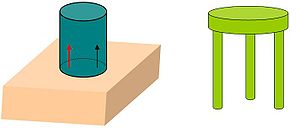 Appui plan isostatique
Appui plan isostatiquePar exemple, un tabouret à trois pied peut toujours trouver son assise au sol, contrairement à une chaise à 4 pattes qui se retrouve souvent bancale ; parce qu'un des pieds est superflu, il y a nécessité de "réglage" pour assurer les 4 points de contact.
- 4 pieds = 4 degrés de liaison
- 4 > 3 (degrés de liaison pour un appui plan)
Dans une liaison mécanique réelle le degré d'hyperstaticité s'exprimera donc comme la différence entre la somme des degrés de liaison des liaisons élémentaires et celui de la liaison finalement obtenue.
L'appui plan (3 degrés de liaison théoriques) de la chaise sur le sol obtenu avec 4 ponctuelles présente 1 degré d'hyperstaticité.
En considérant les associations minimales de ponctuelles, on peut établir les solutions isostatiques de réalisation de liaison. Ainsi une glissière isostatique (5 points) sera obtenue, par exemple:
- par association d'un appui plan (3 points) et d'une linéaire rectiligne (2 points)
- par association d'un pivot glissant (4 points) et d'une ponctuelle (1 points)
- etc.
Article détaillé : Isostatisme, hypostatisme et hyperstatisme.Mise en position
La notion de liaison par ponctuelles est très utilisée en industrie pour la mise en position (ou mise en référence) des pièces à fabriquer sur les machines outils; on recherche alors 6 zones de contact (réduites et donc assimillables à des points) pour que chaque pièce d'une même série soit mise en place de manière univoque et avec une grande répétabilité. Enfin un dispositif de maintien en position assure que la pièce reste à cette place.
Considération du jeu dans une liaison
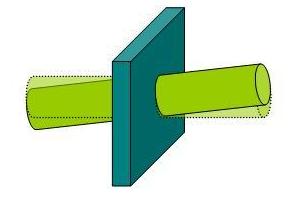 Centrage court avec jeu.
Centrage court avec jeu.La définition théorique d'une liaison s'appuie sur l'analyse des surfaces de liaison supposées de géométrie parfaite (forme et dimensions). La réalité est plus complexe. La considération de jeu dans l'assemblage des pièces peut aboutir à la suppression de degrés de liaison, donc à une modélisation différente de la liaison. Ainsi, l'emboîtement de deux cylindres parfaits complémentaires, qui constitue une liaison pivot glissant, peut devenir une liaison linéaire annulaire, si la longueur de guidage devient très courte et qu'un jeu radial est adopté (appelée alors aussi centrage court).
Dans ce cas, on ajoute au torseur d'action transmissible autant de 0 que de dégrés de liaison supprimés. Cette considération, complètement justifée, aboutit à une simplification des systèmes d'équations en statique par l'élimination arbitraire d'inconnues de liaison.
Tableau récapitulatif
Présentation
Le tableau ci-dessous récapitule, pour l'ensemble des liaisons mécaniques, le propos tenu ci-dessus. Toutes les liaisons sont supposées parfaites, sinon ce qui suit peut être inexact. Il faut encore une fois prendre des précautions pour passer de la simple matrice des degrés de liberté à la détermination des termes nuls d'un torseur. Le choix du point de réduction n'est pas toujours trivial; il faut une bonne connaissance des propriétés géométriques des liaisons pour en saisir la subtilité.
Les torseurs sont exprimés la plupart du temps au point A centre de la liaison. Le repère est le même que celui proposé dans l'article liaison mécanique. L'ensemble des autres points où la forme du torseur est semblable est indiqué en bas de chaque case.
La dernière colonne donne une illustration de la réalisation d'une liaison par association de ponctuelles.
Nom liaison Nb degré de liberté (de liaison)
Matrice des degrés de liberté Torseur des efforts transmissibles 
torseur cinématiquement admissible Association de ponctuelles liaison nulle 6 (0) 
pour tout M
pour tout M
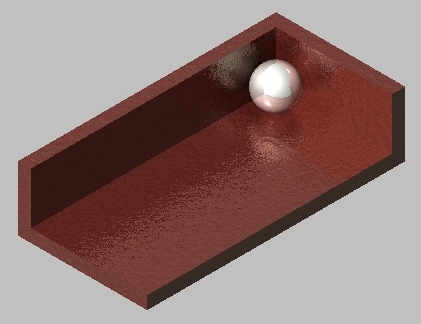
Liaison ponctuelle en A de normale(A,x)
5 (1) 
pour tout M∈(A,x)
pour tout M∈(A,x)
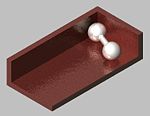
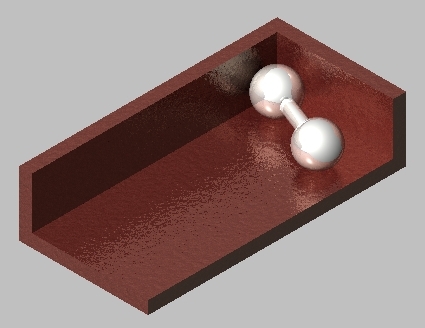
Linéaire annulaire (A,x)
4 (2) 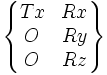
Linéaire rectiligne Ligne (A,x) et normale de contact Y
4 (2) 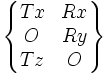
pour tout M∈Plan(A,x,y)
pour tout M∈Plan(A,x,y)
Appui plan (⊥x)
3 (3) 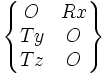
pour tout M
pour tout M
Rotule de centre A
3 (3) 
Rotule à doigt de centre A
(-Rx)
2 (4) 
Pivot glissant (A,x)
2 (4) 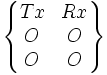
pour tout M∈(A,x)
pour tout M∈(A,x)
Pivot (A,x)
1 (5) 
pour tout M∈(A,x)
pour tout M∈(A,x)
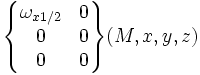
Glissière hélicoïdale (A,x)
1 (5)
Avec Tx= k. Rx
pour tout M∈(A,x)
(*) voir ci-dessous
pour tout M∈(A,x)
Glissière (X)
1 (5) 
pour tout M
pour tout M
Complète 0 (6) 
pour tout M
pour tout M
Cas particulier de la liaison hélicoïdale
Dans cette liaison deux degrés de liberté semblent subsister. Cela provient du fait que les 6 mouvements élémentaires ne permettent pas de l'écrire autrement. Cependant à travers cette liaison, un seul mouvement est possible, puisqu'on ne peut pas effectuer la translation seule ou la rotation seule.
Ce cas illustre bien le danger qu'il y a à considérer les degrés de liberté pour la détermination des torseurs cinématiques ou statique dans une liaison.
La relation cinématique entre les deux mouvements, induit donc (par dualité des torseurs) une relation entre la poussée axiale (Force) et le moment autour de l'axe (ou couple).
Il suffit de comparer dans le tableau ci-dessus les modèles par ponctuelles des pivot, glissière et glissière hélicoïdale pour constater qu'il s'agit d'une seule et même solution. Seule diffère l'inclinaison de la 5e ponctuelle par rapport à l'axe du pivot glissant constitué par les 4 autres.
Liaison nulle et liaison complète
La base du repère de liaison et le point de réduction des torseurs n'ont aucune importance pour ces deux cas.
La liaison nulle est sans intérêt sur le plan mécanique mais son étude mathématique est semblable à celle des autres liaisons.
La liaison compète peut sembler sans intérêt, du moins cinématiquement, puisqu'aucun mouvement n'est permis. Toutefois en statique, son torseur d'action mécanique fait l'objet d'attention particulière, en construction mécanique puisqu'il renseigne sur la direction des efforts transmis par la liaison.
En résistance des matériaux le torseur de cohésion représente les efforts subit dans une section de poutre. Il s'agit d'une liaison complète entre deux parties d'une même pièce. Cette étude aboutit au dimensionnement de la pièce au regard des charges appliquées.
Pour un système rigide, aucun mouvement n'étant possible, les efforts de liaison ont évidemment une puissance nulle !
Degré de mobilité dans un mécanisme
Dans un mécanisme assemblé on constate aisément que plusieurs pièces peuvent avoir des positions respectives liées (non indépendantes). On définit ainsi les mobilités d'un mécanisme, par le fait qu'il est possible d'animer celui-ci suivant une ou plusieurs chaînes cinématiques indépendantes; de ce fait, on peut choisir autant de paramètres pilotes (souvent la position de chaque moteur) que de mobilités à contrôler.
Sur les machines industrielles, ces mobilités contrôlées sont appelés « axes (de commande) », chaque axe étant associé à un actionneur (moteur, vérin...). On désigne ainsi un robot 4 axes, 5 axes, une machines-outils 3 axes etc. Par exemple, une fraiseuse 3 axes permet le contrôle des translations des trois chariots animant la table (longitudinal, transversal et vertical).
Voir aussi
Liens externes
- lien supprimé ! Liaisons cinématiques normalisées
 Portail de la physique
Portail de la physique
Catégorie : Théorie des mécanismes - Liaison ponctuelle en A suivant X
Wikimedia Foundation. 2010.