- Decouplage (automatique)
-
Découplage (automatique)
Le but du découplage est de transformer les fonctions de transfert ou les représentations d'états multivariables pour pouvoir commander chaque sortie indépendamment des autres.
Soit le système :
 et
et  avec dim x = m; dim u = p; dim y = p
avec dim x = m; dim u = p; dim y = pd'où :
 avec F(s) = C(sI − A) − 1B
avec F(s) = C(sI − A) − 1BF est appelé matrice de transfert carré.
Approche Fonction de transfert
En boucle fermé: Y(s) = [I.p + F(s).C(s)] − 1F(s)C(s)Yd(s) avec Yd la consigne
Le découplage consiste à diagonaliser le fonction de transfert en boucle fermé (FTBF).
FTBF = [I.p + F(s).C(s)] − 1F(s)C(s)
Donc le correcteur C(s) doit vérifier: [Ip + F(s)C(s)] − 1F(s)C(s) = Ω(s) avec Ω(s) = matrice diagonale de λ1(s)...λn(s)
On a donc : C(s) = F(s) − 1Ω(s)[I − Ω(s)] − 1
Approche représentation d'état
Soit le système :
et on a
Pour y1 :


Si alors
alors 
d'ou :

Si alors
alors 
...
soit j le plus petit entier tel que
alors

De meme pour les autres sorties :
On obtient
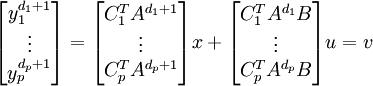
Y = Fx + Lu = v
on trouve donc u = L − 1[v − Fx]Le système est découplale ssi L est inversible.
Le système découplé est donc transformé en sous-systèmes :
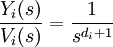 On aboutit à des intégrateurs.
On aboutit à des intégrateurs. Portail des mathématiques
Portail des mathématiques
Catégorie : Automatique
Wikimedia Foundation. 2010.