- Courbure D'un Arc
-
Courbure d'un arc
Sommaire
Courbure d'un arc plan
Considérons un arc paramétré de classe
 dans le plan euclidien orienté
dans le plan euclidien orienté  , supposé régulier (de vecteur dérivé jamais nul). On peut choisir une origine et prendre pour paramètre l'abscisse curviligne s correspondante. Il s'agit d'un paramétrage normal
, supposé régulier (de vecteur dérivé jamais nul). On peut choisir une origine et prendre pour paramètre l'abscisse curviligne s correspondante. Il s'agit d'un paramétrage normal  (la vitesse est de norme constante égale à 1), ce qui permet de définir facilement le repère de Frenet :
(la vitesse est de norme constante égale à 1), ce qui permet de définir facilement le repère de Frenet :- origine : le point
- premier vecteur : le vecteur tangent unitaire
 ,
, - deuxième vecteur
 vecteur normal unitaire, complétant le premier en une base orthonormale directe
vecteur normal unitaire, complétant le premier en une base orthonormale directe
La courbure introduite à partir de l'accélération
Le vecteur tangent unitaire possédant une norme constante, on démontre que sa dérivée lui est toujours orthogonale :
Il existe donc une fonction γ, appelée courbure algébrique, telle que
En paramétrage normal, le vecteur accélération est donc normal (colinéaire au vecteur normal unitaire) et la courbure est sa coordonnée selon le vecteur normal unitaire.
Dans un paramétrage quelconque, la courbure peut aussi être obtenue à partir de la vitesse et de l'accélération par la formule
La courbure vue comme vitesse de rotation du repère de Frenet
Pour déterminer complètement les vecteurs de la base de Frenet, il suffit d'un paramètre angulaire α, donnant l'angle entre T et le premier vecteur de la base fixe (vecteur des abscisses)
Ce paramètre α s'interprète donc comme l'angle que forme la base de Frenet avec une direction fixe.
Il est alors judicieux de prendre l'angle α pour paramètre et de dériver les éléments du repère de Frénet par rapport à α. En mathématiques du moins, il est nécessaire de valider cette opération. On montre que si l'arc est birégulier (c'est-à-dire que les vecteurs dérivée première et seconde ne sont jamais colinéaires), il est possible de faire de l'angle α une fonction régulière reparamétrant l'arc, et ainsi de dériver par rapport à α. On trouvera la discussion correspondante dans l'article sur le théorème de relèvement.
Dans ce paramétrage, le vecteur N s'obtient soit en effectuant une rotation de
 (quart de tour dans le sens direct), soit en ajoutant à α, soit encore en dérivant par rapport à α
(quart de tour dans le sens direct), soit en ajoutant à α, soit encore en dérivant par rapport à αLes formules de dérivation des vecteurs T et N par rapport à α sont rigoureusement identiques aux formules de dérivation de la base mobile en coordonnées polaires, puisqu'il s'agit exactement de la même situation.
La courbure γ vaut alors
C'est donc la vitesse de rotation de la base de Frenet par rapport à une direction fixe (encore une fois, en paramétrage normal).
Introduction géométrique
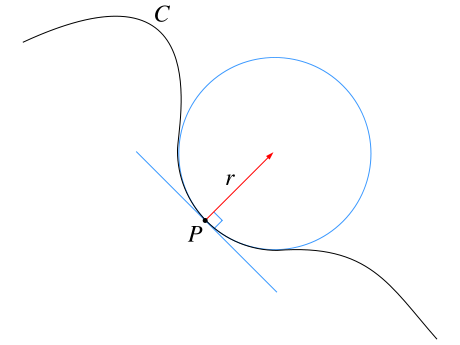 Tangente et cercle osculateur en un point P de la courbe C
Tangente et cercle osculateur en un point P de la courbe CL'analyse dimensionnelle montre que pour un problème de cinématique, γ est homogène à l'inverse d'une longueur. On introduit donc fréquemment le rayon de courbure (algébrique)
Pour comprendre la signification de cette grandeur, il est intéressant d'examiner le cas particulier d'un cercle
L'application de la formule de calcul de la courbure donne R=r.
Plus généralement, pour tout arc
birégulier au point P d'abscisse curviligne s, on montre qu'il existe un unique cercle tangent à la courbe en P et qui « épouse cette courbe le mieux possible » dans un voisinage de P. Ce cercle est appelé cercle osculateur à la courbe en P. Le rayon de ce cercle osculateur, est égal à la valeur absolue du rayon de courbure.Convention alternative : courbure positive
La convention choisie précédemment fait de la courbure et du rayon de courbure des quantités algébriques. Il arrive qu'on prenne les convention suivantes :
- le rayon de courbure est le rayon du cercle osculateur, il est toujours positif
- la courbure est son inverse, elle est toujours positive
- le vecteur est un vecteur unitaire normal à la courbe au point M, orienté vers le centre du cercle osculateur.
Si la courbure algébrique est positive, on retombe exactement sur les conventions précédentes. Sinon, la courbure et le rayon de courbure sont les valeurs absolues des conventions algébriques, et le vecteur normal unitaire est l'opposé de la convention algébrique. La base de Frenet n'est plus forcément une base directe. On retrouve cependant la formule
Avec cette convention le vecteur normal unitaire indique le sens vers lequel est tourné la concavité de la courbe. Un défaut de la convention est que si la courbure est nulle, le vecteur normal unitaire n'est pas défini.
Formulaire
Mode de définition Variables et fonctions Courbure Graphe 

Paramétrique 

Polaire paramétré 

Polaire 

Implicite 
 (divergence du gradient normalisé)
(divergence du gradient normalisé)Courbure d'un arc gauche
Considérons un arc paramétré de classe
dans l'espace euclidien orienté  , supposé régulier ; on peut de nouveau prendre pour paramètre l'abscisse curviligne et définir le repère de Frenet et la courbure. Cependant les questions d'orientation demandent à être examinées de plus près et on ne peut pas définir une coubure algébrique.
, supposé régulier ; on peut de nouveau prendre pour paramètre l'abscisse curviligne et définir le repère de Frenet et la courbure. Cependant les questions d'orientation demandent à être examinées de plus près et on ne peut pas définir une coubure algébrique.Le vecteur tangent unitaire est toujours défini comme le vecteur vitesse en paramétrage normal. Sa dérivée est non nulle et lui est orthogonale. On peut donc poser
Ce qui définit parfaitement la courbure γ et le vecteur normal unitaire à condition d'imposer la positivité de γ.
Courbe tracée sur une surface
Article détaillé : repère de Darboux.Catégorie : Géométrie différentielle classique - origine : le point











Wikimedia Foundation. 2010.