- Coordonnées barycentriques
-
En géométrie affine, les coordonnées barycentriques d'un point par rapport à un repère barycentrique sont une famille de poids permettant de définir ce point comme un barycentre.
Sommaire
Définition
Soit (P0,...,Pn) une famille de points dans un espace affine telle que chaque point ne puisse s'écrire comme le barycentre des autres points et qui ne soient pas tous contenus dans un sous-espace affine strict[1]. Une telle famille est appelée repère barycentrique et dans ce cas, n'importe quel point M de l'espace affine peut s'écrire comme un barycentre des points du repère :

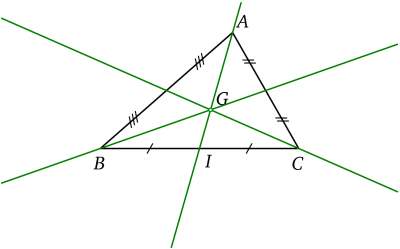
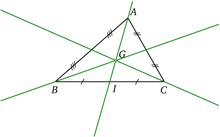 Coordonnées barycentriques dans le triangle.
Coordonnées barycentriques dans le triangle.
Les coordonnées barycentriques de n'importe quel point de l'espace sont alors les « poids » (λ0,...,λn) associés à chaque point du repère. Elles peuvent être définies de manière unique en supposant que la somme des poids soit fixée à 1.
Exemple : coordonnées dans un triangle
Étant donné un triangle ABC de centre de gravité G, le point G est de coordonnées barycentriques (1;1;1) par rapport au repère (A,B,C).
En notant I le milieu de [BC], G a pour coordonnées barycentriques (1;2) par rapport au repère (A,I) de la droite (AI).
Dans ce triangle, le point I est de coordonnées (0;1;1) par rapport au repère (A,B,C).
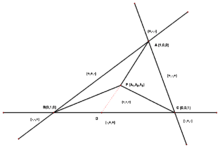 Interprétation des coordonnées barycentriques en termes de rapports de surfaces.
Interprétation des coordonnées barycentriques en termes de rapports de surfaces.Coordonnées et aire. - P désignant un point du plan du triangle ABC (fig. ci-contre) extérieur aux trois droites (AB), (BC), (AC), de coordonnées barycentriques α1,α2,α3 (
 avec α1 + α2 + α3 = 1), ces coordonnées normalisées s'interprètent comme des rapports d'aires de la façon suivante :
avec α1 + α2 + α3 = 1), ces coordonnées normalisées s'interprètent comme des rapports d'aires de la façon suivante :
Convexité
L'enveloppe convexe d'un ensemble de points E rassemble tous les points admettant des coordonnées barycentriques à coefficients tous positifs par rapport à une famille de points de E[2].
Lien avec les coordonnées cartésiennes
Dans un espace vectoriel muni d'une base (e1,...,en), la famille (0,e1,...,en) constitue un repère barycentrique pour la structure d'espace affine canonique et tout vecteur de composantes (λ1,...,λn) pour la base (e1,...,en), correspond au point de coordonnées barycentriques (1 − s,λ1,...,λn), où s est la somme des coefficients λi.
Notes et références
- Autrement dit, il faut qu'ils n'appartiennent pas tous à un même hyperplan.
- Marcel Berger, Géométrie [détail des éditions], Prop. 11.1.8.4, tome 3, p. 26 dans l'édition de 1978.
Lien externe

Wikimedia Foundation. 2010.