- Commande vectorielle
-
La commande vectorielle est un terme générique désignant l'ensemble des commandes tenant compte en temps réel des équations du système qu'elle commande. Le nom de ces commandes vient du fait que les relations finales sont vectorielles à la différence des commandes scalaires. Les relations ainsi obtenues sont bien plus complexes que celles des commandes scalaires, mais en contrepartie elles permettent d'obtenir de meilleures performances lors des régimes transitoires. Il existe des commandes vectorielles pour tous les moteurs à courant alternatif.
Sommaire
But de cet article
Le but de cet article est de présenter de la façon la plus simple possible les commandes vectorielles en général. Aucun calcul ne sera développé en totalité. Les lecteurs qui désirent plus de détails se référeront à la littérature qui regorge de livres et de publications sur le sujet.
Philosophie de la commande vectorielle
À chaque période de fonctionnement de l’onduleur, la commande doit ouvrir ou fermer les interrupteurs de puissance (IGBT ou autre) de manière à créer dans la machine électrique un champ magnétique résultant dont le module et la direction sont optimaux pour répondre aux consignes de vitesse et de couple.
Par construction, la machine à courant continu produit un champ magnétique statorique toujours perpendiculaire au rotor, la position de ce dernier agissant sur la manière dont le stator est alimenté. C’est ce comportement que l’on va chercher à obtenir pour les machines alternatives. Le calculateur qui va agir sur la commande des interrupteurs se doit d’avoir quelques informations pour effectuer les calculs et particulièrement :
- la position du rotor pour les machines synchrones ;
- la vitesse du rotor pour les machines asynchrones.
Ces informations sont obtenues à l’aide d’un capteur de position ou de vitesse. Néanmoins, il est possible de reconstituer cette information avec plus ou moins de précision à l’aide d’informations électriques telles que la connaissance des courants. On parle alors de commande vectorielle sans capteur.
Commande vectorielle des machines tournantes
Comme expliqué ci-dessus, la grande différence entre une commande scalaire et une commande vectorielle vient du modèle représentant la machine que l'on veut commander.
Un modèle scalaire n'utilisant qu'une seule phase, il ne permet pas de connaître le module et l'orientation du champ magnétique. Afin de les déterminer, on va construire un nouveau modèle en se basant sur les relations de bases de la machine électrique utilisée. Soit, pour une machine synchrone :



Théorie
Principe
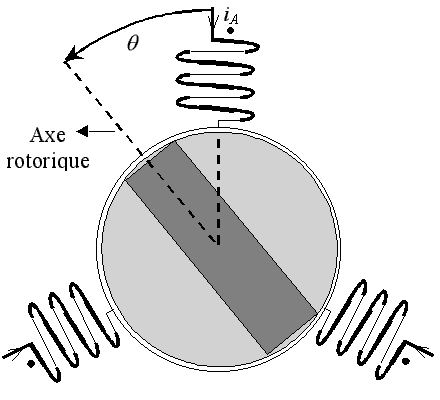
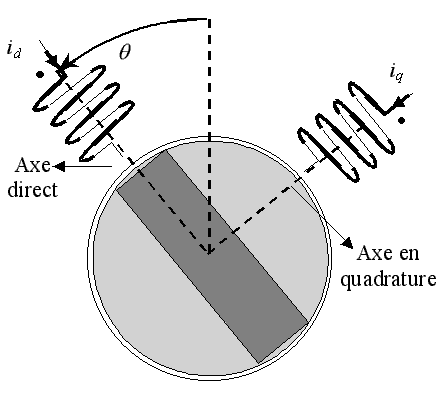
Afin de simplifier pour limiter le temps de calcul, on utilise une transformation mathématique qui permet de remplacer 3 enroulements (a, b et c) décalés de 120° par deux enroulements (d et q) en quadrature et solidaires du rotor de la machine.
Pour que cette transformation soit valable, il est nécessaire d'admettre quelques hypothèses :
- le circuit magnétique de la machine n'est pas saturé ;
- ce circuit magnétique et la répartition des forces magnétomotrices sont homogènes (indépendance vis-à-vis d'une rotation) ;
- la machine doit être alimentée, comme on le fait dans la pratique, par un système de tensions triphasées sans neutre. Dans ce cas, la somme des 3 courants est forcément nulle et la composante homopolaire est nulle.
Simplification des équations vectorielles
La construction du modèle diphasé dans un plan lié au rotor se fait grâce à deux transformations. La première transformation permet de ramener le modèle triphasé à un modèle diphasé ; la seconde nous ramène à une représentation de type Fresnel en modélisant la machine dans un repère tournant lié au rotor.
-

phases statoriques d'une machine synchrone
-

enroulements en quadrature (α ; β ) équivalents et liés au stator
-

enroulements en quadrature ( d ; q ) équivalents et liés au rotor.
La première transformation permet de réduire le nombre d'équations, tandis que la seconde permet de les découpler.
Première transformation
C'est la transformée de Concordia. Elle consiste à remplacer les 3 enroulements parcourus par les courants d'intensité
 par deux enroulements en quadrature et traversés par deux courants d'intensité
par deux enroulements en quadrature et traversés par deux courants d'intensité  . Ces deux enroulements correspondent aux enroulements d et q lorsque l'angle
. Ces deux enroulements correspondent aux enroulements d et q lorsque l'angle  est nul.
est nul.
Seconde transformation
C'est la transformée de Park. Elle consiste à opérer une rotation du repère précédent d'un angle
afin de passer du couple de courants au couple de courants  :
:
Mise en œuvre
Un exemple de mise en œuvre est la structure de la commande vectorielle indirecte.
La méthode du flux orienté indirecte est caractérisée par le fait qu'aucune estimation du flux n'est nécessaire. En revanche, il est nécessaire de connaître de façon précise la position du rotor pour pouvoir déterminer de la même façon la position du flux rotorique. L’estimation du flux rotorique par rapport au rotor se fait en boucle ouverte. Elle sera donc d’autant plus précise que les paramètres utilisés pour son calcul correspondront aux paramètres réels de la machine.
Cette méthode indirecte d’orientation de flux évite la mesure ou l’estimation de la position du flux qui demanderait des méthodes de calcul plus complexes. Cependant, elle est très sensible aux variations des paramètres et elle nécessite un onduleur qui soit capable d’imposer les courants désirés dans la machine [1], car l’angle de changement de repère est lié aux courants de référence imposés. Ainsi, si la position de flux estimé correspond à la position réelle, les lois de commande interne vont générer des vecteurs de courant de référence appropriés au découplage de contrôle de couple et de flux de la machine [2].
Application
Voir aussi
Bibliographie
Liens internes
Liens externes
- (fr) Introduction à la commande vectorielle des machines asynchrones
- (fr) LES MACHINES SYNCHRONES AUTOPILOTÉES - Préparation à l’agrégation de Génie Électrique
 Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique

Wikimedia Foundation. 2010.