- Transformée rapide de Fourier
-
Transformée de Fourier rapide
La transformée de Fourier rapide (sigle anglais : FFT ou Fast Fourier Transform) est un algorithme de calcul de la transformée de Fourier discrète (TFD).
Sa complexité varie en
 avec le nombre de points n, alors que la complexité du calcul de base s'exprime en
avec le nombre de points n, alors que la complexité du calcul de base s'exprime en  . Ainsi, pour n=1024, le temps de calcul de l'algorithme rapide peut être 100 fois plus petit que le calcul utilisant la formule de définition de la TFD.
. Ainsi, pour n=1024, le temps de calcul de l'algorithme rapide peut être 100 fois plus petit que le calcul utilisant la formule de définition de la TFD.Cet algorithme est couramment utilisé en traitement numérique du signal pour transformer des données discrètes du domaine temporel dans le domaine fréquentiel, en particulier dans les analyseurs de spectre. Son efficacité permet de réaliser des filtrages en passant dans le domaine transformé.
Sommaire
Formulation mathématique
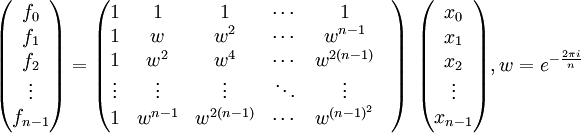
Soient x0, ...., xn-1 des nombres complexes. La transformée de Fourier discrète est définie par la formule suivante :
ou en notation matricielle:
Évaluer ces sommes directement coute (n − 1)2 produits complexes et n(n − 1) sommes complexes alors que seules (n / 2)(log2(n) − 2) produits et nlog2(n) sommes sont nécessaires avec la version rapide. En général, de tels algorithmes dépendent de la factorisation de n mais contrairement à une idée répandue, il y a des transformées de Fourier rapides de complexité
 pour tous les n, même les n qui sont des nombres premiers.
pour tous les n, même les n qui sont des nombres premiers.Comme la transformée de Fourier inverse discrète est équivalente à la transformée de Fourier discrète, à un signe et facteur 1/n près, il est possible de générer la transformation inverse de la même manière pour la version rapide.
Remarque : on peut reconnaître ici une matrice de Vandermonde en la matrice n*n.L'algorithme de Cooley-Tukey
Il s'agit d'un algorithme fréquemment utilisé pour calculer la transformation de Fourier rapide. Il se base sur une approche de type « diviser pour régner » par le biais d'une récursion. Celle-ci subdivise une transformation de Fourier discrète d'une taille composite n = n1n2 en plusieurs transformées de Fourier discrètes de tailles inférieures n1 et n2. Cet algorithme nécessite
 multiplications par des racines d'unité, plus communément appelés facteurs de rotation.
multiplications par des racines d'unité, plus communément appelés facteurs de rotation.C'est en 1965 que James Cooley et John Tukey publient cette méthode mais il a été découvert par la suite que l'algorithme avait déjà été inventé par Carl Friedrich Gauss en 1805 et adapté à plusieurs reprises sous des formes différentes.
L'utilisation la plus classique de l'algorithme de Cooley-Tukey est une division de la transformation en deux parties de taille identique n / 2 et ceci à chaque étape. Cette contrainte limite les tailles possibles, puisque celles-ci doivent être des puissances de deux. Toutefois, une factorisation reste possible (principe déjà connu de Gauss). En général, les implémentations essaient d'éviter une récursion pour des questions de performance. Il est aussi possible de mélanger plusieurs types d'algorithme lors des subdivisions.
Autres algorithmes
Il existe d'autres algorithmes qui permettent de calculer la transformée de Fourier rapide. Pour une taille n = n1n2, avec des nombres premiers entre eux n1 et n2, il est possible d'utiliser l'algorithme PFA (Good-Thomas) basé sur le théorème des restes chinois. Le PFA est similaire à celui de Cooley-Tukey.
L'algorithme de Rader-Brenner est aussi une variante de Cooley-Tukey avec des facteurs de rotation purement imaginaires qui améliorent les performances en réduisant le nombre de multiplications mais au détriment de la stabilité numérique et une augmentation du nombres d'additions. Les algorithmes qui procèdent aussi par des factorisations successives sont ceux de Bruun et l'algorithme QFT. Les versions originales travaillent sur des fenêtres dont la taille est une puissance de deux mais il est possible de les adapter pour une taille quelconque. L'algorithme de Bruun considère la transformée de Fourier rapide comme une factorisation récursive du polynôme zn − 1 en des polynômes avec des coefficients réels de la forme zm − 1 et z2m + azm + 1.
L'algorithme de Winograd factorise zn − 1 en un polynôme cyclotomique, dont les coefficients sont souvent -1,0 ou 1 ce qui réduit le nombre de multiplications. On peut voir cet algorithme comme la version optimale en termes de multiplications. Winograd a montré que la transformée de Fourier discrète peut être calculée avec seulement
multplications, ce qui représente une borne inférieure atteignable pour les tailles qui sont des puissances de deux. Toutefois, des additions supplémentaires sont nécessaires ce qui peut être pénalisant sur les processeurs modernes comportant des unités arithmétiques performantes.L'algorithme de Rader est quant à lui destiné aux fenêtres dont la taille est un nombre premier. Il profite de l'existence d'une génératrice pour le groupe multiplicatif modulo n. La transformation discrète dont la taille est un nombre premier s'exprime ainsi comme une convolution cyclique d'une taille n − 1. On peut ensuite la calculer par une paire de transformation de Fourier rapide.
Finalement, un autre algorithme destiné aux transformations avec des tailles qui sont des nombres premiers est due à Bluestein. On l'appelle plus souvent l'algorithme chirp-z. Ici encore, la transformation est vue comme une convolution dont la taille est identique à la fenêtre originale. On utilise à cet effet l'identité jk = − (j − k)2 / 2 + j2 / 2 + k2 / 2.
Algorithmes spécialisés dans le traitement de données réelles ou/et symétriques
Dans beaucoup d'applications, les données en entrée de la transformation discrète de Fourier sont uniquement des nombres réels. Dans ce cas, les sorties satisfont la symétrie suivante :

Des algorithmes efficaces ont été conçus pour cette situation, par exemple celui de Sorensen en 1987. Une approche possible consiste à prendre un algorithme classique comme celui de Cooley-Tukey et à enlever les parties inutiles dans le calcul. Cela se traduit par un gain de 50% en mémoire et en vitesse de calcul. Alternativement, il est possible d'exprimer une transformation discrète sur des nombres réels (avec une taille paire) en une transformation avec des nombres complexes mais dont la taille a été divisée par deux (les parties imaginaires sont les éléments impairs et les parties réelles sont les éléments pairs) suivie d'un décodage dont la complexité est de l'ordre de
opérations.On pensait que les transformations avec des nombres réels pouvaient être plus efficacement calculées via une transformation discrète de Hartley mais il a été prouvé par la suite qu'une transformation de Fourier discrète modifiée pouvait être plus efficace que la même transformation de Hartley. L'algorithme de Bruun était un candidat pour ces transformations mais il n'a pas eu la popularité escomptée.
Il existe encore d'autres variantes pour les cas où les données sont symétriques (c’est-à-dire des fonctions paires ou impaires) avec un gain supplémentaire de 50%. Dans ce cas, on utilise une transformée en cosinus discret.
Problèmes numériques et approximations
Tous les algorithmes proposés ci-dessus calculent la transformée sans aucune erreur, de par leur nature analytique. Toutefois, il existe des algorithmes qui peuvent s'accommoder d'une marge d'erreur pour accélérer les calculs. En 1999, Edelman et al. proposent une approximation à la transformée de Fourier rapide. Cette version est destinée à une implémentation en parallèle. Une approximation basée sur les ondelettes est proposée en 1996 par H. Guo et Burrus et tient compte de la répartition dans les entrées/sorties. Un autre algorithme a encore été proposé par Shentov et al. en 1995. Seul l'algorithme de Edelman fonctionne bien avec n'importe quel type de données, il profite de la redondance dans la matrice de Fourier plutôt que de la redondance dans les données initiales.
Toutefois, même les algorithmes décrits de manière analytique présentent des erreurs lorsqu'ils sont implémentés avec des virgules flottantes dont la précision est limitée. L'erreur est cependant limitée. Une borne supérieure d'erreur relative pour Cooley-Tukey est donnée par O(εlog(n)) alors qu'elle est de O(εn3 / 2) pour la formulation triviale de la transformée de Fourier discrète (Gentleman et Sande, 1966). Le terme ε représente ici la précision relative en virgule flottante. En fait, l'erreur quadratique moyenne est encore plus limitée avec seulement
 pour Cooley-Tukey et
pour Cooley-Tukey et  pour la version triviale. Il ne faut malgré tout pas oublier que la stabilité peut être perturbée par les différents facteurs de rotation qui interviennent dans les calculs. Un manque de précision sur les fonctions trigonométriques peut fortement augmenter l'erreur. L'algorithme de Rader est par exemple nettement moins stable que celui de Cooley-Tukey en cas d'erreurs prononcées.
pour la version triviale. Il ne faut malgré tout pas oublier que la stabilité peut être perturbée par les différents facteurs de rotation qui interviennent dans les calculs. Un manque de précision sur les fonctions trigonométriques peut fortement augmenter l'erreur. L'algorithme de Rader est par exemple nettement moins stable que celui de Cooley-Tukey en cas d'erreurs prononcées.Avec une arithmétique en virgule fixe, les erreurs s'accumulent encore plus vite. Avec Cooley-Tukey, l'augmentation de l'erreur quadratique moyenne est de l'ordre de
. De plus, il faut tenir compte de la magnitude des variables lors des différentes étapes de l'algorithme.Il est possible de vérifier la validité de l'algorithme grâce à une procédure qui vise à déterminer la linéarité et d'autres caractéristiques de la transformation sur des entrées aléatoires (Ergün, 1995).
Références
- James W. Cooley and John W. Tukey, « An algorithm for the machine calculation of complex Fourier series, » Math. Comput. 19, 297–301 (1965).
- Carl Friedrich Gauss, « Nachlass: Theoria interpolationis methodo nova tractata, » Werke band 3, 265–327 (Königliche Gesellschaft der Wissenschaften, Göttingen, 1866). Voir aussi M. T. Heideman, D. H. Johnson, and C. S. Burrus, « Gauss and the history of the fast Fourier transform, » IEEE ASSP Magazine 1 (4), 14–21 (1984).
- P. Duhamel and M. Vetterli, « Fast Fourier transforms: a tutorial review and a state of the art, » Signal Processing 19, 259–299 (1990).
- W. M. Gentleman and G. Sande, « Fast Fourier transforms—for fun and profit, » Proc. AFIPS 29, 563–578 (1966).
- H. Guo, G. A. Sitton, and C. S. Burrus, « The Quick Discrete Fourier Transform, » Proc. IEEE Conf. Acoust. Speech and Sig. Processing (ICASSP) 3, 445–448 (1994).
- H. V. Sorensen, D. L. Jones, M. T. Heideman, and C. S. Burrus, « Real-valued fast Fourier transform algorithms, » IEEE Trans. Acoust. Speech Sig. Processing ASSP-35, 849–863 (1987).
- A. Edelman, P. McCorquodale, and S. Toledo, « The future fast Fourier transform? » SIAM J. Sci. Computing 20, 1094–1114 (1999).
- H. Guo and C. S. Burrus, « Fast approximate Fourier transform via wavelets transform, » Proc. SPIE Intl. Soc. Opt. Eng. 2825, 250–259 (1996).
- O. V. Shentov, S. K. Mitra, U. Heute, and A. N. Hossen, « Subband DFT. I. Definition, interpretations and extensions, » Signal Processing 41 (3), 261–277 (1995).
- James C. Schatzman, « Accuracy of the discrete Fourier transform and the fast Fourier transform, » SIAM J. Sci. Comput. 17 (5), 1150–1166 (1996).
- A. V. Oppenheim and R. Schafer, Digital Signal Processing (Englewood Cliffs, NJ: Prentice-Hall, 1975).
- Funda Ergün, « Testing multivariate linear functions: Overcoming the generator bottleneck, » Proc. 27th ACM Symposium on the Theory of Computing, 407–416 (1995).
- Matteo Frigo and Steven G. Johnson: FFTW, http://www.fftw.org/ : Une implémentation libre (GPL) de la transformée de fourier rapide (bibliothèque C) pour des données de taille et de dimensions arbitraires. "The Design and Implementation of FFTW3," Proceedings of the IEEE 93 (2), 216–231 (2005).
 Portail des mathématiques
Portail des mathématiques
Catégories : Transformée | Théorie de Fourier | Algorithme numérique | Transformée du signal

Wikimedia Foundation. 2010.