- Robot parallèle
-
Un robot parallèle est un mécanisme dont l'architecture lui confère des propriétés remarquables.
 Structure de principe
Structure de principe
 Deux robots parallèles
Deux robots parallèlesLa définition scientifique est : « Mécanisme en chaîne cinématique fermée dont l'organe terminal est relié à la base par plusieurs chaînes cinématiques indépendantes »[1].
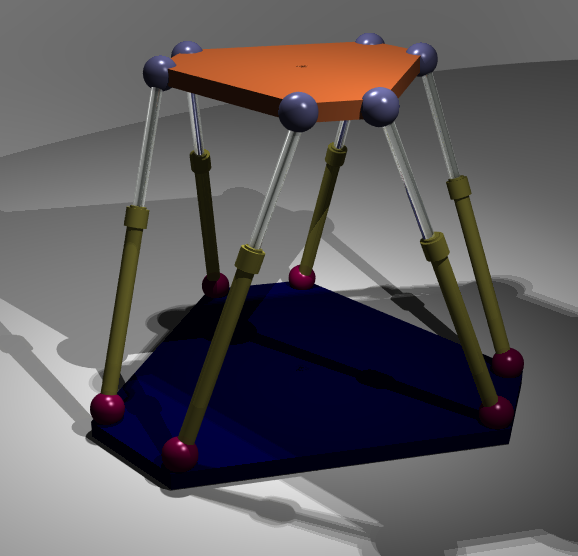
Le plus répandu parmi les mécanismes parallèles est connu sous des dénominations comme «hexapode», «plate-forme de Gough-Stewart», «plateforme synergistique». Il peut se présenter sous différentes formes mais comporte en général 6 actionneurs identiques dont le couplage assure les qualités du système : 6 degrés de liberté dans les déplacements c’est-à-dire x, y, z, tangage, lacet et roulis.
Il existe toutefois des robots de ce type avec de 2 à 5 degrés de liberté.
Ce type de robot présente les avantages suivants par rapport à leur homologue de type série :
- possibilité d'embarquer des charges très lourdes (par exemple pour les simulateurs de vol)
- haute précision (la géométrie de la mécanique rend moins sensibles les mouvements de la plate-forme aux erreurs de mesure des capteurs qui en permettent le contrôle)
- plus grande rigidité (des travaux sont en cours pour présenter des machines d'usinage utilisant ce concept)
- possibilité de déplacements à très haute vitesse (les robots les plus rapides du monde[2],[3] sont des robots parallèles)
- fonctionnement à des échelles de taille allant du très grand (les simulateurs de vol, certaines machines de parc d'attractions) au très petit (des micro-robots utilisable en microchirurgie)
Leurs inconvénients majeurs sont un espace de travail relativement réduit et une plus grande complexité de conception et de commande en raison de leur comportement hautement non linéaire.
À noter aussi des possibilités d'actionnement très variées : au lieu de jambes rigides, on peut parfaitement utiliser des câbles qui ont permis de réaliser des grues comme la RoboCrane avec une bonne précision de positionnement et 6 degrés de liberté ou bien des supports de maquettes pour les souffleries, comme le projet SACSO (Suspension ACtive pour essais en SOufflerie) de l'Onera.
 plate-forme en mouvement
plate-forme en mouvementLes applications de ce mécanisme, qui peut prendre des tailles extrêmes, sont très nombreuses :
- robots manipulateurs pour processus industriels,
- manipulateurs en microchirurgie,
- plate-forme de mouvement pour simulateurs, cinéma dynamique,
- support d'orientation pour télescope,
Selon l'application, la géométrie du mécanisme peut varier.
Notes et références
- Jean-Pierre Merlet, Les Robots Parallèles, Paris, Hermes Science Publishing, 21 février 1997, 367 p. (ISBN 978-2866015992)
- [1] Vidéo YouTube sur le robot Adept Quattro
- Vidéo Youtube sur l'ABB Flexpicker
Liens externes
- (fr) Un site d'information sur les robots parallèles
- (en) État de l'art par J-P.Merlet de l'INRIA (2002)
- (fr) Références et dessins de robots par J-P.Merlet de l'INRIA
- (fr) Le site du laboratoire de robotique de l'Université Laval
- (en) Développement sous licence GPL
- (fr) SYMETRIE – Système de Positionnement, Mesure, Mouvement de type hexapode
- (en) RoboCrane, une page de l'Université Carnegie Mellon
- (fr) la version machine-outil de l'hexapode par la société CMW-Marioni.
Catégories :- Dispositif mécanique
- Robotique

Wikimedia Foundation. 2010.