- Rheologie des solides
-
Rhéologie des solides
La rhéologie est une partie de la physique qui étudie la plasticité, l'élasticité, la viscosité et la fluidité caractéristiques des corps déformables. Du grec reo (couler) et logos (étude).
Cet article concerne la rhéologie des solides, c'est-à-dire leur déformation, leur écoulement.
Sommaire
Propriétés mécaniques des solides
Lire l'article déformation élastique en guise d'introduction.
Contrainte et déformation
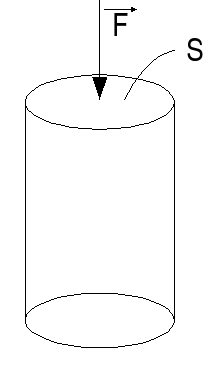
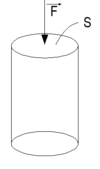 La pression sur un cylindre de section S change cette dernière. On considère en générale cette variation comme négligeable
La pression sur un cylindre de section S change cette dernière. On considère en générale cette variation comme négligeable
En physique, l'effort exercé sur une pièce est représenté par la force F, exprimée en en Newton (N). La variation dimensionnelle est une longueur, exprimée en mètres.
Cependant, ceci dépend de la forme de la pièce. Si l'on s'intéresse aux propriétés du matériau, il faut s'abstraire des dimensions de la pièce. On caractérise donc l'effort par la contrainte et la variation dimensionnelle par la déformation
- Contrainte
- Si S est la surface sur laquelle s'exerce la force F, on définit la contrainte σ

- La surface dépend de la déformation, mais pour les petites déformations, ceci est souvent négligé.
- Déformation
- Si L0 est la longueur initiale de la pièce, alors la déformation ε est l'allongement relatif (sans unité)

- Si la contrainte est faible alors la déformation est faible et donc

Articles détaillés : Tenseur des contraintes et Tenseur des déformations.Propriétés du matériau
Lors de son utilisation, une pièce peut se déformer de manière complexe. Pour permettre l'étude, on considère des déformations modèles simples.
Ces déformations simples permettent de définir des caractéristiques chiffrées du matériau.
- Compression/traction uniaxiale
- module d'Young, noté Ec et exprimé en Pa ou plus couramment en GPa

- Lors d'un étirement ou d'un raccourcissement, on constate un élargissement ou une contraction de la pièce, caractérisée par le coefficient de Poisson ν (sans unité)

- Si ν = 0,5 alors ΔV est faible sous Δε ; exemples de valeur de coefficient de Poisson :
- ν = 0,5 : liquide
- ν = 0,5 : caoutchouc
- ν = 0,2 − 0,35 : verre, polymère solide
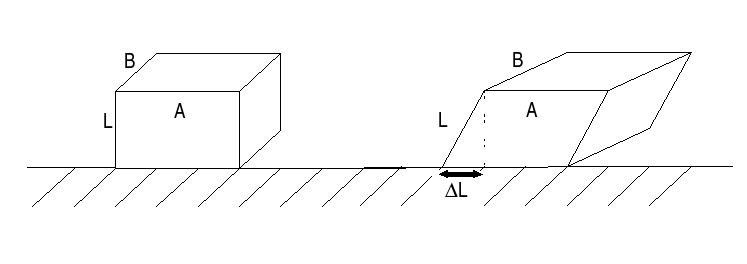
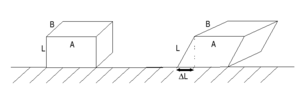 Schéma du cisaillement d'un solide
Schéma du cisaillement d'un solide- Cisaillement
- module de cisaillement, noté G :
- complaisance de cisaillement, notée J :

- Flexion
- combinaison de traction, compression, cisaillement.
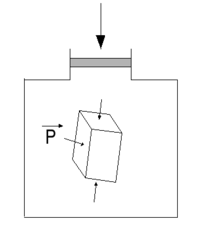 La compression est la même sur chaque face du solide
La compression est la même sur chaque face du solide- Compression isostatique (ou hydrostatique)
- module de compressibilité (bulk modulus) noté K :
Relation entre les propriétés mécaniques
On a donc quatre coefficients E, G, B et ν, et deux relations. On peut alors écrire :
E = 2(1 + ν)G 
Types d'essais mécaniques
- Essais dynamiques : σ,ε varient en fonction du temps
Article détaillé : Essai mécanique.Viscoélasticité
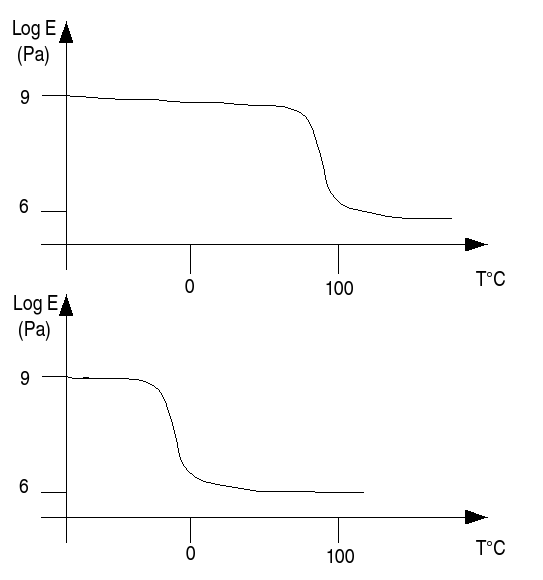
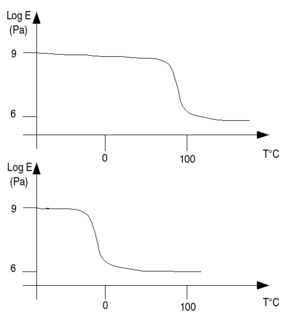 Deux polymères différents ont des comportements différents selon les températures
Deux polymères différents ont des comportements différents selon les températures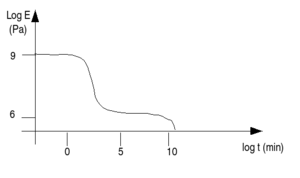 La rigidité d'un solide (polymère) est fonction du temps
La rigidité d'un solide (polymère) est fonction du tempsLa viscoélasticité d'un corps dépend de sa température et du temps de repos. On note en général :
E = f(T,t) On étudiera alors qu'une de ses deux variables à la fois.
- Si on sollicite le solide, on le fera à température constante
- Si on fait varier la température, on l'étudiera après un temps expérimental fixe.
Ici on étudiera la relaxation qui est un phénomène réversible et détectable, se traduisant par une différence de mobilité moléculaire. Il ne faut pas la confondre avec la transition qui est un changement d'état physique (fusion, cristallisation, transition vitreuse...)
Principe de Boltzmann
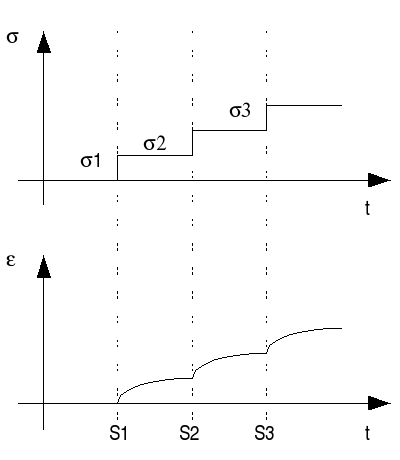
Selon Boltzmann, l'état de contrainte ou de déformation d'un corps viscoélastique est fonction de toutes les sollicitations appliquées au matériau.
Chaque nouvelle sollicitation contribue de manière indépendante à l'état final.
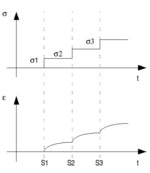 Principe de Boltzmann : chaque nouvelle contrainte contribue de façon indépendante à la déformation finale
Principe de Boltzmann : chaque nouvelle contrainte contribue de façon indépendante à la déformation finaleLes modèles rhéologiques de base
Corps idéalement élastiques
- La réversibilité entre contrainte et déformation est parfaite (il n'y a pas d'effet mémoire du matériau).
- Les relations entre contrainte et déformation sont instantanées.
- Les relations entre contrainte et déformation sont linéaires.

Le matériau peut être modélisé en mécanique par un ressort. Il n'y a aucune dissipation d'énergie.
Corps idéalement visqueux

où η est la constante de Newton.
On a alors
 ici ε0 représente la déformation initiale, donc nulle.
ici ε0 représente la déformation initiale, donc nulle.On obtient alors
 .
.L'énergie est totalement dissipée sous forme calorifique. Le modèle équivalent en mécanique est celui d'un amortisseur.
Combinaison des modèles
Afin de représenter le comportement viscoélastique des différents solides, on peut combiner ces deux modèles équivalents.
Maxwell
Le modèle de Maxwell rend compte du comportement viscoélastique et élastique d'un matériau mais pas de son comportement viscoplastique.
- à
 ,
, 
- à
 ,
, 
Voigt

Zener
 avec
avec 
Burger
 avec
avec 
Dans ce modèle on a les trois composantes :
- élastiques avec

- viscoélastique avec

- viscoplastique avec
Comportement dynamique
Etude pratique de la rhéologie des solides
 Portail de la physique
Portail de la physique
Catégorie : Mécanique des milieux continus

 : Relaxation
: Relaxation :
: 

Wikimedia Foundation. 2010.