- Machine synchrone
-
 Machine triphasée
Machine triphasée

Une machine synchrone est une machine électrique :
- soit produisant un courant électrique dont la fréquence est déterminée par la vitesse de rotation de la machine : fonctionnement « générateur » (alternateur) ;
- soit absorbant un courant électrique dont la fréquence détermine la vitesse de rotation de la machine : fonctionnement « moteur ».
Au-delà de quelques kilowatts, les machines synchrones sont généralement des machines triphasées. Le rotor, souvent appelé « roue polaire », est alimenté par une source continue.
Sommaire
Principes généraux
La machine synchrone se compose d'une partie mobile, celle qui tourne, appelée rotor ; et d'une partie fixe appelée stator. Le rotor se compose d'aimants permanents, ou d'électro-aimants (bobinages alimentés par un courant continu).
Pour produire du courant, on utilise une force extérieure pour faire tourner le rotor : son champ magnétique, en tournant, induit un courant électrique dans les bobines du stator. La vitesse de ce champ tournant est appelée « vitesse de synchronisme ».
Si l'on ne fait pas tourner le rotor par une force extérieure, celui ci tournera seul : son champ magnétique s'alignera tour à tour sur chacune des trois bobines du stator. De décalage en décalage, cela provoquera la rotation du rotor. La fréquence de rotation (sa vitesse) est proportionnelle à la fréquence de l'alimentation électrique.
Machine synchrone triphasée
Mise en équation
Méthode utilisée
Notations
- Toutes les grandeurs statoriques sont repérées soit par l'indice S soit par des indices en majuscules.
- Toutes les grandeurs rotoriques sont repérées soit par l'indice r soit par des indices en minuscules.
L'angle
 correspond au décalage angulaire entre le stator et le rotor.
correspond au décalage angulaire entre le stator et le rotor. : Inductances propres d'un enroulement du stator ; d'un enroulement du rotor.
: Inductances propres d'un enroulement du stator ; d'un enroulement du rotor. : Inductance mutuelle entre deux enroulements du stator.
: Inductance mutuelle entre deux enroulements du stator. : Valeur maximale de l'inductance mutuelle entre l'enroulement du rotor et un du stator (correspondant à une position pour laquelle θ = 0 ± 2π/3 ).
: Valeur maximale de l'inductance mutuelle entre l'enroulement du rotor et un du stator (correspondant à une position pour laquelle θ = 0 ± 2π/3 ).
Hypothèse
La mise en équation n'est opérable que pour une machine à pôles lisses et dont le circuit magnétique est non saturé. Pour les autres machines, on apportera des correctifs permettant (avec plus ou moins d'exactitude) la prise en compte de leurs complexités.
Pour la suite on considère une machine pour laquelle :
- Son circuit magnétique est homogène (entrefer constant) et non saturé. De ce fait, les diverses inductances sont constantes (entrefer constant).
- Les courants des trois phases statoriques ont la même valeur efficace IS (la machine est assimilable à un récepteur triphasé parfaitement équilibré).
- Elle possède une seule paire de pôles (machine bipolaire). Les machines multipolaires se ramènent à une machine bipolaire au prix d'une transformation angulaire.

Les courants
Au stator
On fixe l'origine des temps de manière à pouvoir écrire :
On en déduit les courants des deux autres phases du stator :
Avec :
 , et
, et  : pulsation des courants statoriques
: pulsation des courants statoriquesAu rotor
Au rotor, il n'y a que le courant continu Ir alimentant la bobine du rotor par l'intermédiaire d'un contact glissant sur une bague collectrice.
Remarque
- Si le rotor est constitué d'un aimant, on considèrera une bobine produisant un moment magnétique équivalent, c’est-à-dire traversée par un courant Ir que l'on determine à l'aide de la méthode d'Hopkinson (application du théorème d'Ampère à un circuit magnétique).
- C’est-à-dire :
 la longueur de l'aimant
la longueur de l'aimant respectivement la section moyenne de l'aimant et celle de la bobine
respectivement la section moyenne de l'aimant et celle de la bobine
- On pose :
- En supposant que la bobine et l'aimant ont la même section, on obtient :
Les flux
Flux à travers un enroulement statorique
Comme :
 , alors
, alors  ,
,
On pose
 : inductance cyclique
: inductance cyclique
L'expression du flux devient alors
l'expression du nombre complexe représentant le flux est
avec
 la représentation complexe d'un courant sinusoïdal « fictif » de valeur maximale
la représentation complexe d'un courant sinusoïdal « fictif » de valeur maximale  et de pulsation
et de pulsation  .
.En toute rigueur, cette substitution n'est valable qu'en régime établi : aucune modification de la charge ou de l'alimentation. C'est une condition nécessaire pour affirmer que la fréquence de rotation est exactement égale à la fréquence de l'alimentation.
Flux à travers un enroulement rotorique
Le flux traversant le rotor est le résultat de deux champ magnétiques :
- Le champ tournant, créé par les enroulements statoriques ;
- Le champ propre, créé par l'enroulement rotorique qui est constant (courant continu) mais qui tourne mécaniquement à la même vitesse que le précédent (machine synchrone). Avec la même limite qu'au paragraphe précédent : aucune modification de la charge ou de l'alimentation.
Les tensions
Tension aux bornes d'une phase du stator
On pose Eav la tension à vide, c’est-à-dire la tension lorsque
 (tension créée par le seul champ rotorique)
(tension créée par le seul champ rotorique)Modélisation
Il existe plusieurs modèles équivalents de la machine synchrone suivant le nombre de paramètres dont on veut tenir compte.
Le modèle équivalent de Behn-Eschenburg
Le modèle de Behn Eschenburg ne s'applique que si la machine est non saturée et à pôles lisses. C'est le plus simple, il ne tient compte d'aucune saturation ni variation de l'entrefer. Il consiste à remplacer chaque phase de la machine par un ensemble de trois dipôles en série tels que la tension aux bornes de ce dipôle est égale à :

avec :
-
 et
et  constants et indépendants du fonctionnement de la machine.
constants et indépendants du fonctionnement de la machine. uniquement proportionnelle à la fréquence de rotation et au courant d'excitation (courant rotorique).
uniquement proportionnelle à la fréquence de rotation et au courant d'excitation (courant rotorique).
Ce modèle convient bien aux gros turboalternateurs de forte puissance. On peut encore simplifier le modèle (et les calculs qui en découlent) en négligeant
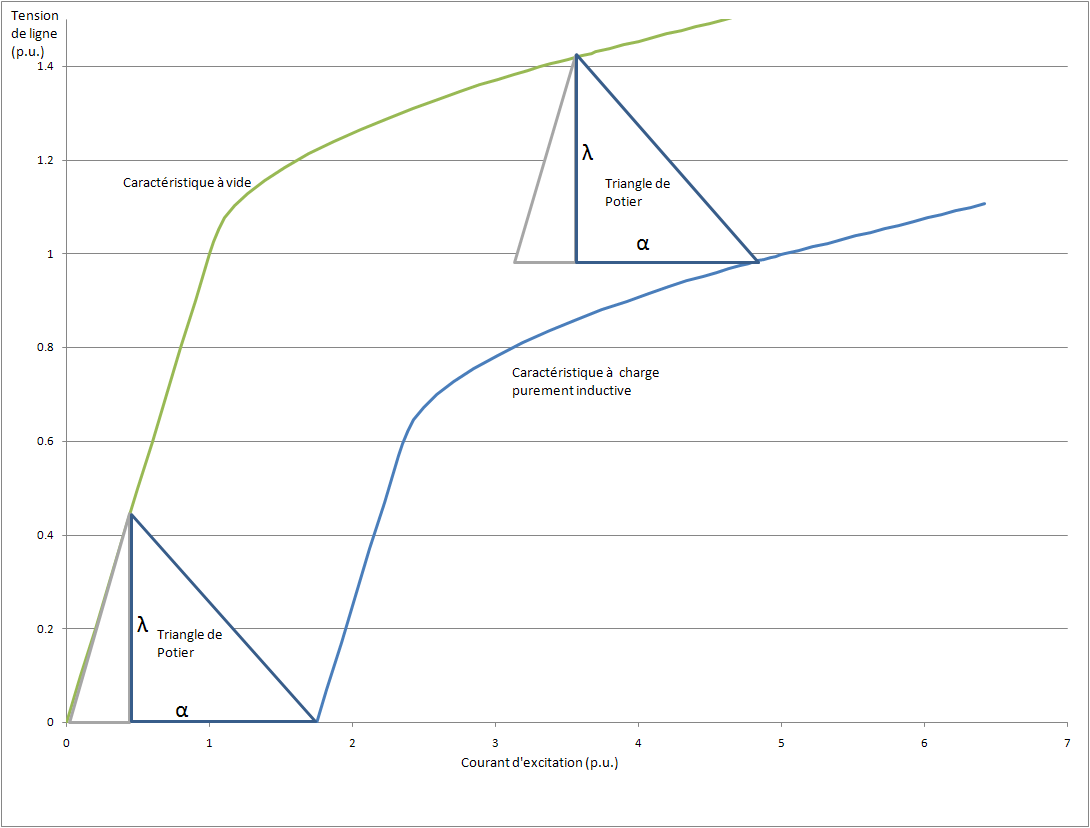
devant .Le modèle équivalent de Potier
Ce modèle est plus complet que celui de Behn-Eschenburg. Il tient compte de la saturation en faisant varier le courant d'excitation en fonction du courant traversant les bobines du stator. Cette modification du courant excitateur fait varier la fcem.
Dans ce modèle on a :
Détermination des paramètres du modèle de Potier
 Triangle de Potier
Triangle de PotierLe modèle de Blondel à deux réluctances
Il permet de prendre en compte les variations angulaires de réluctance des machines synchrones à pôles saillants.
Notes et références
Annexes
Articles connexes
Liens externes
- (fr) Contraintes mécaniques sur un rotor de turbo-alternateur
- (fr) Moteur synchrone
- (fr) Les Machines synchrones autopilotées - Préparation à l’agrégation de génie électrique
- (fr) Cours et Problèmes sur les machines électriques dont la machine synchrone
 Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique
















Wikimedia Foundation. 2010.