- DirectIA
-
DirectIA
La simulation du comportement humain est un nouveau défi lancé aux technologies de simulation. DirectIA est un moteur décisionnel propriétaire de la société MASA Group tirant parti des progrès récents en intelligence artificielle, utilisé pour modéliser des agents autonomes qui présentent un comportement adaptatif. De tels agents autonomes sont utilisés aujourd’hui dans un grand nombre de simulations. Ils ouvrent la voie à une nouvelle génération d’applications, dans lesquelles le comportement humain est représenté de manière réaliste.Sommaire
Ajouter la dimension humaine à la simulation
La modélisation du comportement humain est le nouveau défi lancé aux technologies de simulation. Le réalisme des environnements virtuels s’est grandement amélioré au cours des cinq dernières années, grâce à l’émergence de nouvelles technologies et à l’accroissement important de la puissance de calcul disponible à faible coût. Cependant, la plupart des simulations du comportement humain s’appuient encore sur des algorithmes traditionnels comme les automates à états finis ou les arbres décisionnels. Mais ces technologies sont incapable de faire face à la complexité des problèmes de modélisation actuels.
 DirectIA et la boucle d’IA. Étant donné des perceptions provenant de l’environnement, le moteur décisionnel sélectionne l’action la plus appropriée en réponse à ces perceptions. Les algorithmes de perception et d’action, comme la visibilité et le pathfind, appartiennent au niveau sensorimoteur, alors que DirectIA appartient au niveau décisionnel de la boucle d’IA.
DirectIA et la boucle d’IA. Étant donné des perceptions provenant de l’environnement, le moteur décisionnel sélectionne l’action la plus appropriée en réponse à ces perceptions. Les algorithmes de perception et d’action, comme la visibilité et le pathfind, appartiennent au niveau sensorimoteur, alors que DirectIA appartient au niveau décisionnel de la boucle d’IA.
Les utilisateurs étant de plus en plus exigeants, il est donc nécessaire de développer de nouvelles technologies pour enrichir les environnements virtuels à l’aide de comportements humains réalistes. Cette dimension humaine doit être intégrée à la fois au niveau de l’individu et au niveau du groupe. Par exemple, la simulation d’un poste de commandement militaire nécessitera la simulation de la chaîne de commandement, tandis qu’un environnement urbain virtuel nécessitera la simulation des comportements des individus et des foules.
Est-il possible d’utiliser la même approche pour résoudre deux problèmes en apparence si différents ? Le but de cet article est d’introduire une nouvelle approche de la décision humaine développée grâce aux avancées récentes en intelligence artificielle (IA). Cette nouvelle approche offre la capacité de simuler des agents logiciels qui présentent des comportements humains réalistes. Nous montrerons comment cette technologie a été industrialisée par MASA Group pour devenir DirectIA, un nouveau moteur décisionnel s’appuyant sur une architecture modulaire, qui peut être configurée en utilisant un langage de script standard, Lua.
Les deux voies de l’IA
Classiquement, un agent est défini comme une entité (réelle ou abstraite), capable d’agir sur elle-même et sur son environnement, et qui possède une représentation interne de son environnement. Un agent peut communiquer avec d’autres entités agents, et son comportement est la conséquence de ses perceptions, de ses représentations, et de ses interactions avec d’autres agents.
Simuler des agents dans un environnement virtuel requière la simulation du processus complet qui va de la perception de l’environnement, ou plus généralement d’un stimulus, à une action sur l’environnement. Ce processus est appelé la boucle d’IA (voir figure), et la technologie utilisée pour la simuler peut être subdivisée en deux catégories. L’IA sensorimotrice ou de bas niveau s’occupe du problème de la perception (qu’est-ce qui est perçu ?) ou du problème de l’animation (comment sont exécutées les actions ?). L’IA décisionnelle ou de haut niveau s’occupe du problème de la sélection d’action (quelle est la réponse la plus appropriée en réponse à une perception donnée, ie. quel est le comportement le plus approprié ?).
Tandis que les technologies d’IA disponibles sur le marché se concentrent sur l’IA sensorimotrice, le moteur DirectIA est une technologie d’IA décisionnelle qui a pour but de résoudre le problème de la sélection d’action dans des environnements virtuels complexes.
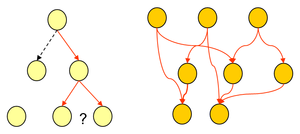 Comparaison d’un arbre décisionnel traditionnel avec le graphe de décision DirectIA. À gauche, dans un arbre décisionnel traditionnel, un choix est fait à chaque étape, ce qui réduit progressivement l’espace des choix possibles, et a pour résultat une perte d’information décisionnelle. À droite, dans le graphe décisionnel DirectIA, aucun choix exclusif n’est effectué avant l’étape finale, évitant ainsi une perte d’information décisionnelle. Les nœuds d’un arbre décisionnel sont responsables du choix, alors que les nœuds d’un graphe décisionnel DirectIA sont seulement responsables de la modulation de l’information décisionnelle.
Comparaison d’un arbre décisionnel traditionnel avec le graphe de décision DirectIA. À gauche, dans un arbre décisionnel traditionnel, un choix est fait à chaque étape, ce qui réduit progressivement l’espace des choix possibles, et a pour résultat une perte d’information décisionnelle. À droite, dans le graphe décisionnel DirectIA, aucun choix exclusif n’est effectué avant l’étape finale, évitant ainsi une perte d’information décisionnelle. Les nœuds d’un arbre décisionnel sont responsables du choix, alors que les nœuds d’un graphe décisionnel DirectIA sont seulement responsables de la modulation de l’information décisionnelle.L’IA traditionnelle ou symbolique
Il existe deux approches principales en IA décisionnelle. La grande majorité des technologies disponibles sur le marché, comme les algorithmes de planification, les automates à états finis ou les systèmes experts, sont issus des travaux de l’IA traditionnelle ou symbolique. Ses principales caractéristiques sont :
- C’est une approche de haut en bas : elle subdivise, d’une manière récursive, un problème donné en une série de sous problèmes qui sont supposés être plus faciles à résoudre.
- Elle est fondée sur la connaissance a priori : elle repose sur une description symbolique du monde, par exemple un ensemble de règles.
Cependant, les limites de l’IA traditionnelle, dont le but est de construire des systèmes qui imitent l’intelligence humaine, sont bien connus : inévitablement, il se produit une explosion combinatoire des règles à cause de la complexité de l’environnement. En effet, il est impossible de prédire toutes les situations qui peuvent être rencontrées par un agent autonome.
L’IA située ou comportementale
Afin de résoudre ce problème, il a été proposé une autre approche de l’IA décisionnelle, connue sous le nom d’IA située ou comportementale. Elle ne cherche pas à modéliser des systèmes qui produisent des processus de raisonnement déductif, mais plutôt des systèmes qui se comportent de manière réaliste dans leur environnement. Les caractéristiques principales de cette approche sont les suivantes :
- C’est une approche de bas en haut : elle repose sur des comportements élémentaires, qui peuvent être combinés afin d’implémenter des comportements plus complexes.
- Elle est fondée sur le comportement : elle ne dépend pas d’une description symbolique de l’environnement, mais plutôt d’un modèle des interactions des agents avec leur environnement.
Le but de l’IA située est de modéliser des agents qui sont autonomes dans leur environnement. Ceci est réalisé grâce à la robustesse de l’architecture de contrôle et à ses capacités d’adaptation à des situations imprévues.
La communauté de l'IA située a proposé plusieurs solutions au problème de la sélection d'action. La première tentative pour résoudre ce problème remonte aux subsumption architectures[1], qui étaient en fait plus une technique d'implémentation qu'un algorithme. Cependant, cette dernière traça la voie à de nombreuse autres, en particulier les free-flow hierarchies[2] et les activation networks[3]. Une comparaison de la structure et des performances de ces deux mécanismes a révélé l'avantage des free-flow hierarchies dans la résolution du problème de sélection d'action[4][5]. Cependant, les motor schemas[6] et les process description languages[7] sont deux autres approches qui ont été utilisées avec succès pour les robots autonomes.
Le moteur décisionnel DirectIA
Le moteur décisionnel DirectIA tire parti des avancées de l’IA située[8]. Ce moteur, qui utilise une technologie brevetée[9] développée par MASA Group, permet la simulation d’agents autonomes dans leur environnement. C’est une architecture algorithmique à deux couches : la couche de décision propage l’information décisionnelle vers la couche d’action, qui produit en sortie l’action la plus adaptée à la situation courante. Ainsi, cette architecture implémente un système de sélection d’action.
Les avantages de ce mécanisme de sélection d’action sont multiples :
- Plusieurs possibilités d’action peuvent être explorées en parallèle avant que la sélection d’action ait lieu : il n’y a pas de perte d’information décisionnelle.
- Plusieurs tâches peuvent être accomplies simultanément : le système peut adopter des comportements de compromis.
- Les règles décisionnelles des nœuds de comportement sont plus simples puisqu’elles sont responsables de la modulation de l’information décisionnelle et non de la sélection de choix intermédiaires.
- Un comportement complexe peut émerger de l’interaction d’un ensemble de règles de décision simples.
En conséquence, un agent DirectIA choisira ses actions selon son état interne, sa perception de l’environnement, sa mémoire des évènements et des lieux, et l’information obtenue par la communication avec d’autres agents.
Notes et références
- ↑ Brooks, R. (1986). A robust layered control system for a mobile robot. IEEE Journal of Robotics and Automation 2(1):14-23.
- ↑ Rosenblatt J. and Payton D (1989). A fine-grained alternative to the subsumption architecture for mobile robot control. In: Proceedings of the IEEE International Conference on Neural Networks 2:317-324.
- ↑ Maes P. (1989). How to do the right thing. Technical Report AIM-1180, MIT Artificial Intelligence Laboratory.
- ↑ Tyrrell T. (1993). Computational mechanisms for action selection. PhD, University of Edinburgh.
- ↑ Tyrrell T (1993). The use of hierarchies for action selection. Adaptive Behavior 1(4):387-420.
- ↑ Arkin R. Motor schema based navigation for a mobile robot: an approach to programming by behavior. In: Proceedings of the IEEE Conference on Robotics and Automation, pp. 264-271, 1987.
- ↑ Steels, L. (1993). Building agents with autonomous behavior systems. In: The artificial route to artificial intelligence. Building situated embodied agents. Lawrence Erlbaum Associates, New Haven.
- ↑ Chiva E., Devade J., Donnart J.-Y., and Maruéjouls S. (2003) Motivational graphs: A new architecture for complex behavior simulation. In: Rabin S. (ed.), AI Game Programming Wisdom 2, pp 361-372, Charles River Media.
- ↑ WO0203325 (2002-01-10) Système automatique pour la prise de décision par un agent virtuel ou physique et procédé de pilotage d'un agent correspondant. Agami V., Donnart J.-Y., Heintz B., pour Mathématiques Appliquées S.A. (MASA)
Voir aussi
Articles connexes
- Intelligence artificielle
- Arbre de décision
- Automate fini
- Système expert
- Planification (intelligence artificielle)
Liens et documents externes
Français
 Portail de l’informatique
Portail de l’informatique
Catégories : Outil de développement logiciel | Intelligence artificielle | Lexique et notions du jeu vidéo

Wikimedia Foundation. 2010.