- Calcul des déterminants
-
Calcul du déterminant d'une matrice
Il existe de nombreux procédés de calcul du déterminant d'une matrice carrée de taille n à coefficients réels, ou plus généralement à coefficients dans un corps K. La méthode la plus efficace en règle générale est l'utilisation d'une technique de pivot de Gauss.
Sommaire
Cas particuliers simples
- Les formules des premiers paragraphes s'appliquent dans le cas des dimensions égales à 2 ou à 3.Voir aussi de dimension égales à 4 * Règle de Cramer
- La règle de Sarrus est un procédé visuel, qui permet de retenir la formule de calcul des déterminants d’ordre 3. Ce n'est toutefois pas toujours la méthode la plus simple ou la plus rapide. Une approche basée sur les propriétés de linéarité du déterminant permet souvent d'effectuer moins d'opérations, ou d'obtenir une forme factorisée plus intéressante.
La règle de Sarrus consiste à écrire les trois colonnes de la matrice et à répéter dans l’ordre, les deux premières lignes en dessous de la matrice. Il suffit alors d’effectuer les produits des coefficients de chaque diagonale et d’en faire la somme si la diagonale est descendante ou la différence si la diagonale est ascendante. Plus clairement : pour calculer
 , il suffit d'effectuer
, il suffit d'effectuera b c d e f g h i a b c d e f et a b c d e f g h i a b c d e f affectés d'un signe positif affectés d'un signe négatif et le résultat est
 .
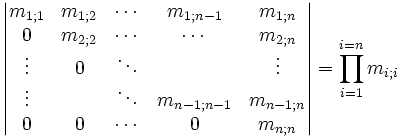
.- le déterminant d'une matrice triangulaire est le produit des coefficients diagonaux
- Démonstration :
- On procède par récurrence. Il suffit d'appliquer la formule de Laplace à la première colonne pour se ramener d'une matrice de taille n à une matrice de taille n-1.
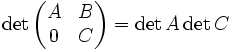
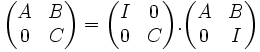
- le déterminant d'une matrice triangulaire par blocs est le produit des déterminants des blocs diagonaux
- Démonstration
- On commence par simplifier la situation en utilisant le produit par blocs suivant
- Il suffit en effet de prouver que la première matrice a pour déterminant det C, la seconde det A. Mais pour cela on reprend la méthode de démonstration utilisée pour les matrices triangulaires. Ainsi pour la première matrice, on effectue des développements successifs par rapport aux premières lignes, qui sont les plus simples : il ne reste plus que le déterminant de C. Pour la deuxième matrice, on suit une méthode analogue avec les dernières lignes.
Méthodes générales
1. Application directe de la formule de Leibniz
- Appliquée en toute généralité, cette formule demande d'effectuer une somme de n! termes, chacun constitué d'un produit de n termes. Sans même prendre en compte le calcul de signature, le nombre de calculs nécessaires dépasse l'ordre (n+1)!.
2. Application récursive de la formule de Laplace
- Le calcul d'un déterminant de taille n se ramène à une somme de n déterminants de taille n-1, chacun d'eux étant somme de n-1 déterminants de taille n-2, et ainsi de suite. Le temps de calcul croît de nouveau comme une factorielle en n.
- Dans la pratique la formule de Laplace n'est intéressante que si plusieurs des coefficients a(i,j) d'une même colonne (ou d'une même ligne) sont nuls.
3. Utilisation du caractère multilinéaire
- On peut suivre une méthode de type pivot de Gauss pour transformer le déterminant par des opérations élémentaires en un déterminant triangulaire dont le calcul est aisé. Le temps de calcul croît alors seulement comme n3.
La dernière méthode est donc celle qu'il convient de privilégier pour un calcul général. Mais si la matrice présente des symétries particulières, une technique adaptée peut permettre de conclure plus aisément.
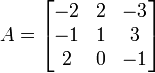
Exemple
Soit à calculer
1. Par utilisation directe de la définition (ou règle de Sarrus, cela revient au même)
2. Par applications successives de la formule de Laplace (en commençant par la deuxième colonne, la plus avantageuse pour la disposition des zéros)
3. Par utilisation d'une technique de type pivot de Gauss, la première colonne est remplacée par la somme des colonnes 1 et 2
ce qui rend le développement par rapport à cette colonne évident
Calculs de déterminants classiques
- déterminant circulant
- déterminant de Cauchy et son cas particulier le déterminant de Hilbert
- déterminant d'une matrice de Toeplitz
- déterminant de Vandermonde
 Portail des mathématiques
Portail des mathématiques
Catégorie : Déterminant







Wikimedia Foundation. 2010.