- Camera Temps de Vol (Time of Flight)
-
Une caméra fonctionnant sur le principe du temps de vol (anglais : Time of Flight, TOF) permet de mesurer en temps réel – jusqu’à 50 images par seconde- une scène en 3 dimensions (3D).
Pour ce faire, les caméras TOF illuminent la scène / les objets mesurés par un pulse de lumière, et mesurent le temps que ce pulse prend pour effectuer le trajet entre l’objet et la caméra. Le « temps de vol » de ce pulse est directement proportionnel à la distance entre la caméra et l’objet mesuré. Cette mesure de temps de vol est effectuée indépendamment par chaque pixel de la caméra, permettant ainsi d’obtenir une image complète en 3D de l’objet mesuré. Le principe de mesure est donc très similaire à celui des scanners laser, avec cependant l’avantage décisif de permettre l’acquisition de la totalité de l’image et non d’une seule ligne.
 SwissRanger 4000 de MESA Imaging avec résolution de 176 × 144 pixel
SwissRanger 4000 de MESA Imaging avec résolution de 176 × 144 pixel
 PMD[vision] CamBoard de PMDTechnologies GmbH avec résolution de 200 × 200 pixel
PMD[vision] CamBoard de PMDTechnologies GmbH avec résolution de 200 × 200 pixelSommaire
Composantes d’une caméra TOF
Une caméra TOF est composée au minimum des éléments suivants :
Illumination
L’illumination sert à illuminer la scène/l’objet que l’on désire mesurer. Elle se compose de LEDs ou de diodes lasers ayant la capacité de générer des pulses de lumière assez rapides pour mesurer des temps de vol de l’ordre de la nanoseconde. L’illumination est généralement dans le proche infrarouge pour ne pas interférer avec la lumière ambiante.
Optique
L’Optique capte la lumière réfléchie par l’objet et la focalise celle-ci sur le capteur TOF. L’optique est souvent aussi constituée d’un filtre à bande passante dans l’infrarouge, permettant d’éliminer la lumière ambiante superflue.
Capteur TOF
Le capteur TOF est la partie principale d’une caméra TOF. Le capteur TOF est similaire à un capteur de caméra standard (2D) de par le fait qu’il est constitué d’une partie active permettant de transformer la lumière incidente en signal électrique. Cependant, les capteurs TOF sont nettement plus complexes de par le faite que chaque pixel est aussi capable de mesurer le temps de vol que la lumière incidente a parcourue entre la caméra et l’objet. Cette complexité a le prix d’utiliser une surface plus grande par pixel, ce qui a pour conséquence une résolution latérale (ou nombre de pixels) nettement moins grande que pour les capteurs 2D standards. Une résolution typique pour une caméra TOF se situe aux alentours de 176 x 144 pixels.
Electronique
L’électronique permettant de faire fonctionner la caméra joue un rôle non négligeable de par le fait que les temps de vols mesurés sont dans le domaine des picosecondes. L’électronique doit être capable de précisément synchroniser la lumière émise avec le fonctionnement du capteur TOF. Pour donner une idée de la précision requise, il est intéressant de se rappeler que 100 picosecondes de déphasage représentent déjà une erreur sur la distance de 15 mm.
Conversion Analogue / Digital
Le signal généré par le capteur TOF doit être convertis en signal digital, du type coordonnées sphériques ou coordonnées cartésiennes. Cette conversion doit tenir compte des paramètres internes de la caméra, tels les facteurs de distorsion de l’optique, et doit être finement coordonnée avec les facteurs de calibration propres à chaque caméra.
Avantages des caméras TOF
Acquisition 3D de la totalité de la scène en temps réel
Étant donné que chaque pixel de la caméra livre une mesure de la distance, les caméras TOF permettent d’acquérir en un temps très réduit et sans procédé de balayage la totalité de l’objet/la scène mesurée. Les caméras TOF permettent d’acquérir jusqu’à 50 images 3D/seconde des objets mesurés
Stabilité mécanique
Contrairement aux scanners lasers utilisant parfois des têtes pivotantes afin de balayer la totalité de l’objet mesuré et utilisant une mécanique complexe permettant de générer la ligne de balayage, les caméras TOF offrent l’avantage d’acquérir la totalité de l’image sans procédé de balayage. Cela permet de construire des caméras mécaniquement très stables, en évitant toutes pièces mobiles qui seraient astreintes aux détériorations dues aux vibrations.
Taille réduite
Contrairement aux caméras stéréo qui sont soumises à des contraintes géométriques leur imposant une taille minimale, et contrairement aux scanners lasers nécessitant une mécanique complexe et volumineuse, les caméras TOF peuvent être conçues de taille compacte. Il existe des caméras de type industriel n’étant pas plus grandes que 65x65x80mm. Extraction des données 3D aisée : Contrairement aux caméras stéréo qui nécessitent des algorithmes puissants ainsi que des structures de référence sur les objets mesurés afin d’extraire les données 3D, les caméras TOF ne nécessitent aucun algorithme spécifique et les mesures sont indépendantes de structures de référence sur les objets mesurés.
Désavantages des caméras TOF
Interférences dues à la lumière directe d’une source lumineuse (tel que lumière du soleil)
Étant donné que les caméras TOF dépendent de la quantité du signal propre collecté, la lumière ambiante peut interférer avec la mesure de la distance. Afin de capter un bon signal, il est important de maximiser le rapport entre la lumière provenant de la caméra et la lumière provenant de sources externes. Il existe plusieurs manières d’aborder le problème :
- Munir l’optique d’un filtre à bande passante afin de réduire la quantité de lumière ambiante incident sur le capteur
- Augmenter la quantité de lumière émise par la caméra afin de contrer les effets de la lumière ambiante (par exemple en ajoutant plus de LEDs dans la caméra). Cette méthode n’est que partiellement applicable, étant donné qu’elle génère un surplus de chaleur dans la caméra qu’il s’agit d’évacuer à l’aide de ventilateurs (non conforme aux applications industrielles) ou à l’aide de caméras plus massives et plus volumineuses
- Augmenter la sensibilité du capteur TOF afin de minimiser le temps d’exposition à la lumière externe. Cette méthode est la plus prometteuse, car elle permet, à performances égales, de réduire la quantité de lumière émise par la caméra, d’éviter la nécessité de ventilateurs et de réduire les dimensions de la caméra.
Domaines d’applications
 Image de distance d'un visage capturé avec une caméra temps de vol
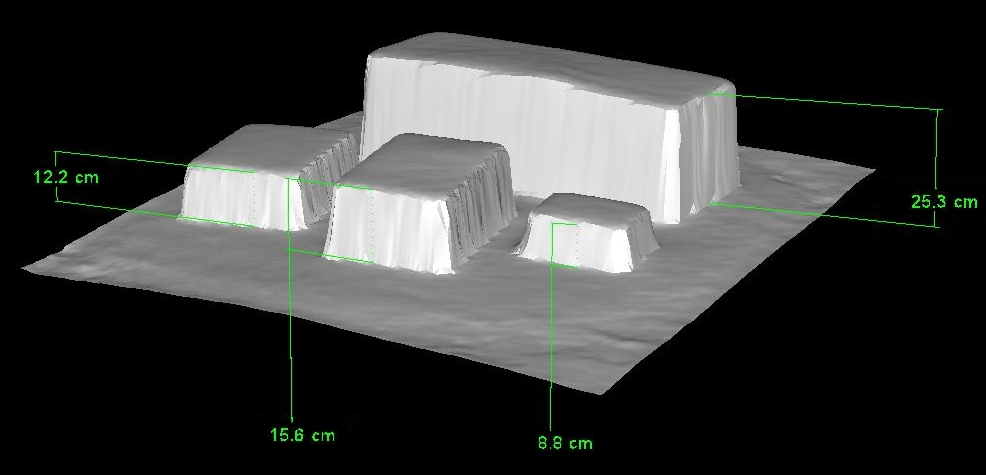
Image de distance d'un visage capturé avec une caméra temps de vol Mesurage des objets avec l'aide des images 3D Temp de Vol
Mesurage des objets avec l'aide des images 3D Temp de VolLes caméras TOF permettent de résoudre une multitude d’applications. Voici une liste non exhaustive de nouvelles possibilités offertes par les caméras TOF :
- Interaction machine – être humain
- Mesure de volumes et de positions dans le domaine de l’automatisation industrielle
- Assistance de parcage/ de conduite dans le domaine automobile
- Navigation automatique dans le domaine de la robotique
- Positionnement des patients pour les traitements de cancers par voie d’irradiations
Quelques compagnies actives dans le domaine des caméras TOF
- DepthSense– caméras et modules TOF développés par SoftKinetic Sensors (official website)
- SR4000 (Swissranger) : capteurs, modules et caméras TOF de type industriels développés par MESA Imaging AG (official website)
- PMD[vision] – capteurs TOF, modules, caméras et software développés par PMDTechnologies GmbH
- FOTONIC-B70 – caméras TOF et software développé par Fotonic. Capteur TOF développé par Canesta
Vidéos
- Video YouTube: Contrôle du curseur avec caméra temps de vol
- Video YouTube: Contrôle d'un robot avec caméra temps de vol
 Portail de la réalisation audiovisuelle
Portail de la réalisation audiovisuelle



Wikimedia Foundation. 2010.