- Repère de darboux
-
Repère de Darboux
En géométrie différentielle, le repère de Darboux est un repère mobile utile pour l'étude des courbes tracées sur une surface de l'espace euclidien orienté à trois dimensions. Il permet la définition des courbures normale et géodésique, et de la torsion géodésique.
Il ne faut pas confondre ce repère avec la notion de base de Darboux en géométrie symplectique.
Définition du repère de Darboux
On suppose que Σ est une nappe paramétrée de l'espace euclidien orienté E à trois dimensions, de paramétrage donnée par la fonction M(u,v) de classe
 (k>1) d'un domaine de R2 dans E. On suppose qu'il s'agit d'une nappe régulière, c'est-à-dire que les vecteurs
(k>1) d'un domaine de R2 dans E. On suppose qu'il s'agit d'une nappe régulière, c'est-à-dire que les vecteurs  sont indépendants. Ils fournissent alors une base du plan tangent, permettent de l'orienter et de définir la normale orientée à la surface
sont indépendants. Ils fournissent alors une base du plan tangent, permettent de l'orienter et de définir la normale orientée à la surfaceOn suppose qu'un arc paramétré γ est tracé sur la surface, et qu'il est paramétré par l'abscisse curviligne sous la forme d'une fonction P(s) de classe
. Le vecteur vitesse est donc unitaire et tangent à la courbe, dirigé dans le sens du mouvementCe vecteur, appelé vecteur tangent unitaire est bien évidemment inclus dans le plan tangent à la surface. Il est possible de compléter la famille (t,n) par un vecteur g tel que le triplet (t,g,n) forme une base orthonormale directe : il suffit en effet de prendre
appelé vecteur normal géodésique. Il est à la fois contenu dans la plan tangent à la surface et orthogonal à la droite tangente à la courbe. Le repère de Darboux au point de paramètre s est obtenu en prenant pour origine P(s) et les vecteurs (t,g,n) calculés au point s.
Formules de Darboux
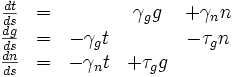
Les vecteurs du repère de Darboux sont par construction des fonctions dérivables de s. En outre, comme t,g,n constituent une base orthonormale pour toute valeur de s, les vecteurs dérivés vérifient un certain nombre de relations appelées formules de Darboux. Il existe des coefficients γn (courbure normale), γg (courbure géodésique) et τg (torsion géodésique) calculés au point de paramètre s et tels que les relations suivantes soient vérifiées
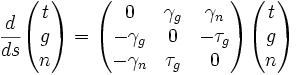
On peut résumer ces formules symboliquement en utilisant une matrice
L'orthonormalité des vecteurs du repère de Darboux se traduit par l'antisymétrie de la matrice : il s'agit en fait ici d'un résultat général sur les bases mobiles.
De même que les vecteurs du repère de Darboux, les trois coefficients associés γn, γg et τg sont invariants par les changements de paramétrage respectant l'orientation de la courbe ou de la surface.
Lien avec le repère de Frenet
En tant que courbe gauche de l'espace orienté, l'arc γ dispose également d'un autre repère mobile, le repère de Frenet (P(s),T(s),N(s),B(s)). Les premiers vecteurs (tangent unitaire) t et T coïncident.
On passe donc d'un des deux repères à l'autre par une opération géométrique simple : une rotation dans le plan normal au vecteur T=t permet de passer de N à n. On note α l'angle de cette rotation de sorte que les formules de passage sont
 Portail de la géométrie
Portail de la géométrie
Catégorie : Géométrie différentielle classique



Wikimedia Foundation. 2010.