- P3 (Robot)
-
ASIMO
 Un robot ASIMO
Un robot ASIMO
ASIMO (アシモ) est le nom générique donné à des robots humanoïdes développés par Honda. ASIMO est l’acronyme de « Advanced Step in Innovative MObility » ; prononcé « ashimo » (« des jambes aussi ») en japonais. Le nom rappelle celui de l’écrivain Isaac Asimov[1], bien que selon Honda ce n'est qu'une coïncidence.
ASIMO est un robot de recherche, il n'est donc pas commercialisé. Néanmoins, il a déjà été prêté pour quelques événements publics. Il a aussi été loué par de grandes entreprises comme IBM, afin de remplir la tâche d’hôte d’accueil. En février 2009 il existait plus de 100 robots ASIMO , dans quatre versions différentes.
À terme, les robots ASIMO devront pouvoir venir en aide aux personnes handicapées, âgées ou malades. Il pourront aussi effectuer des tâches dangereuses pour les humains.
Sommaire
Innovations technologiques
L'une des principales innovations technologiques de ce robot est le fait qu’il est capable de modifier sa trajectoire tout en marchant, contrairement aux robots d’anciennes générations contraints de stopper leur marche avant d’effectuer une rotation sur place. De même, il lui est possible de détecter les mouvements des objets, ainsi que leur trajectoire. De plus, Il est aussi capable de monter et descendre des escaliers, reconnaître des visages, comprendre la parole humaine, analyser son environnement, garder son équilibre sur des surfaces mouvantes, etc. Trois versions de ce robot ont pour l’instant, vu le jour.
Les prototypes
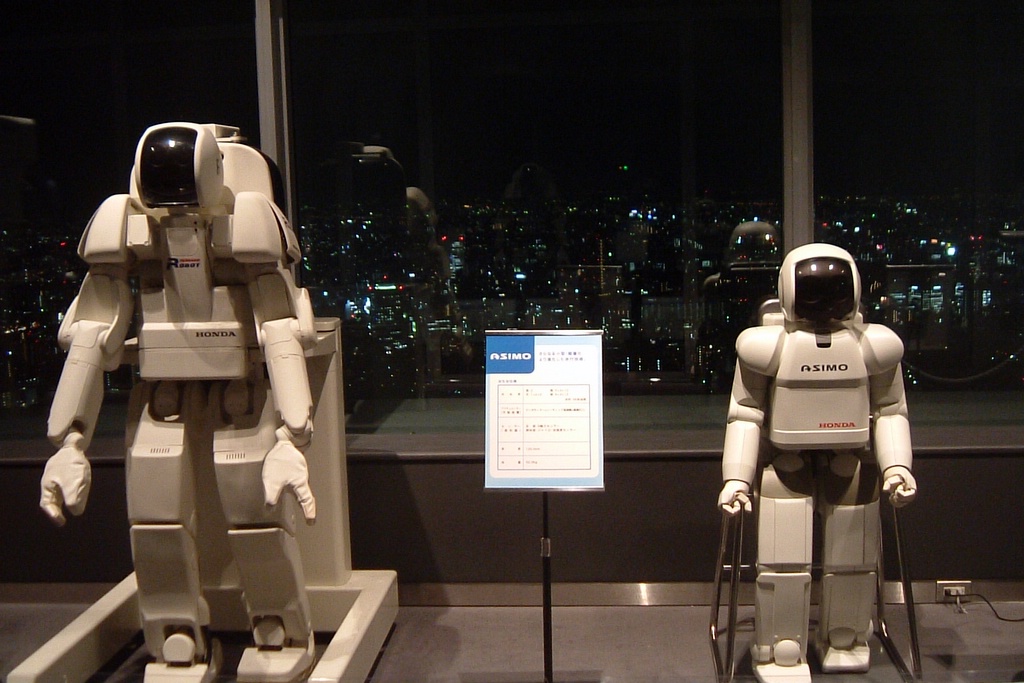
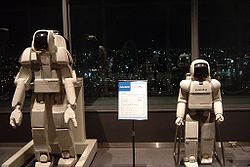 Un robot ASIMO (à droite), au coté d'un prototype P3
Un robot ASIMO (à droite), au coté d'un prototype P3Honda a débuté ses recherches sur les robots humanoïdes en 1986. Dans un premier temps, les ingénieurs ont cherché à maitriser la marche humaine. Ainsi, les premiers robots n’étaient qu’une simple paire de jambes articulées. C’est ensuite qu’il a été ajouté des bras et un véritable corps. ASIMO correspond ainsi à l’aboutissement de cette recherche sur le plan mécanique. Aujourd’hui, les recherches de Honda se focalisent davantage sur l’amélioration de l’intelligence artificielle du robot.
On peut remarquer la très grande vitesse à laquelle la technologie de ces robots s’est améliorée. De même, leur poids et leur taille n’ont cessé de diminuer au fil des nouveaux modèles, si on prend en compte les robots de la série P-X.
Contrairement à ses prédécesseurs qui n'étaient que de simples expérimentations dans le domaine de la robotique, puis des prototypes, Asimo est le premier modèle de test, visant à une future commercialisation.
La série "Ex"
La lettre "E" de la série E-X désigne « Experimental Model ». Cette première série de robots est constituée de bipèdes démunis de bras et ne pouvant se déplacer que sur des surfaces plates.
- E0 : 1986 (? km/h)
- E1 : 1987-1991 (0,25 km/h)
- E2 : 1987-1991 (1,20 km/h)
- E3 : 1987-1991 (3 km/h)
- E4 : 1991-1993 (4,7 km/h)
- E5 : 1991-1993 (? km/h)
- E6 : 1991-1993 (? km/h)
La série "Px"
La série de robot P-X ou « Prototype Model » est munie de bras articulés.
Le P1
P1 est le premier robot humanoïde de Honda créé en 1993. Il possède des jambes qui lui permettent de marcher à vitesse réduite et des bras. Il est très différent d'Asimo.
Caractéristiques techniques Hauteur 191,5 cm Poids 175 kg Vitesse inconnue Autonomie inconnue Le P2
Le P2 a été présenté en décembre 1996. Honda a indiqué avoir dépensé 100 millions de dollars sur ce projet. Ce robot a la particularité d'être le premier robot bipède a pouvoir monter et descendre des escaliers.
Caractéristiques techniques Hauteur 182 cm Poids 210 kg Vitesse inconnu Autonomie inconnu Le P3
Le P3 fut finalisé en septembre 1997, mais il n'a jamais été commercialisé car il ne s'agissait que d'un prototype d'étude.
Caractéristiques techniques Hauteur 160 cm Largeur 60 cm Longueur 55,5 cm Poids 130 kg Vitesse 2 km/h Autonomie 25 minutes Degrés de liberté de mouvement 28 Les différentes versions d'ASIMO
La 1re version d’ASIMO
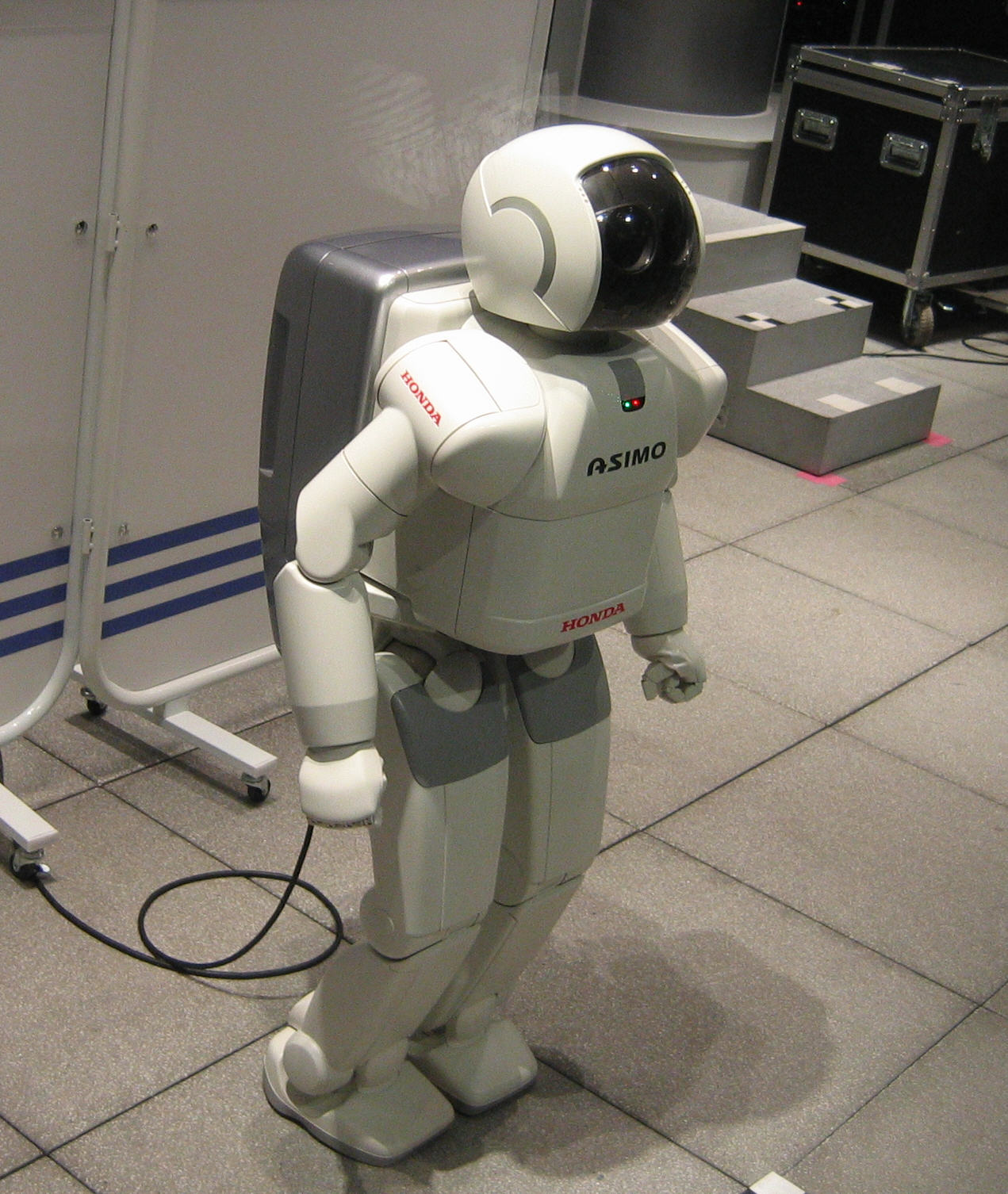
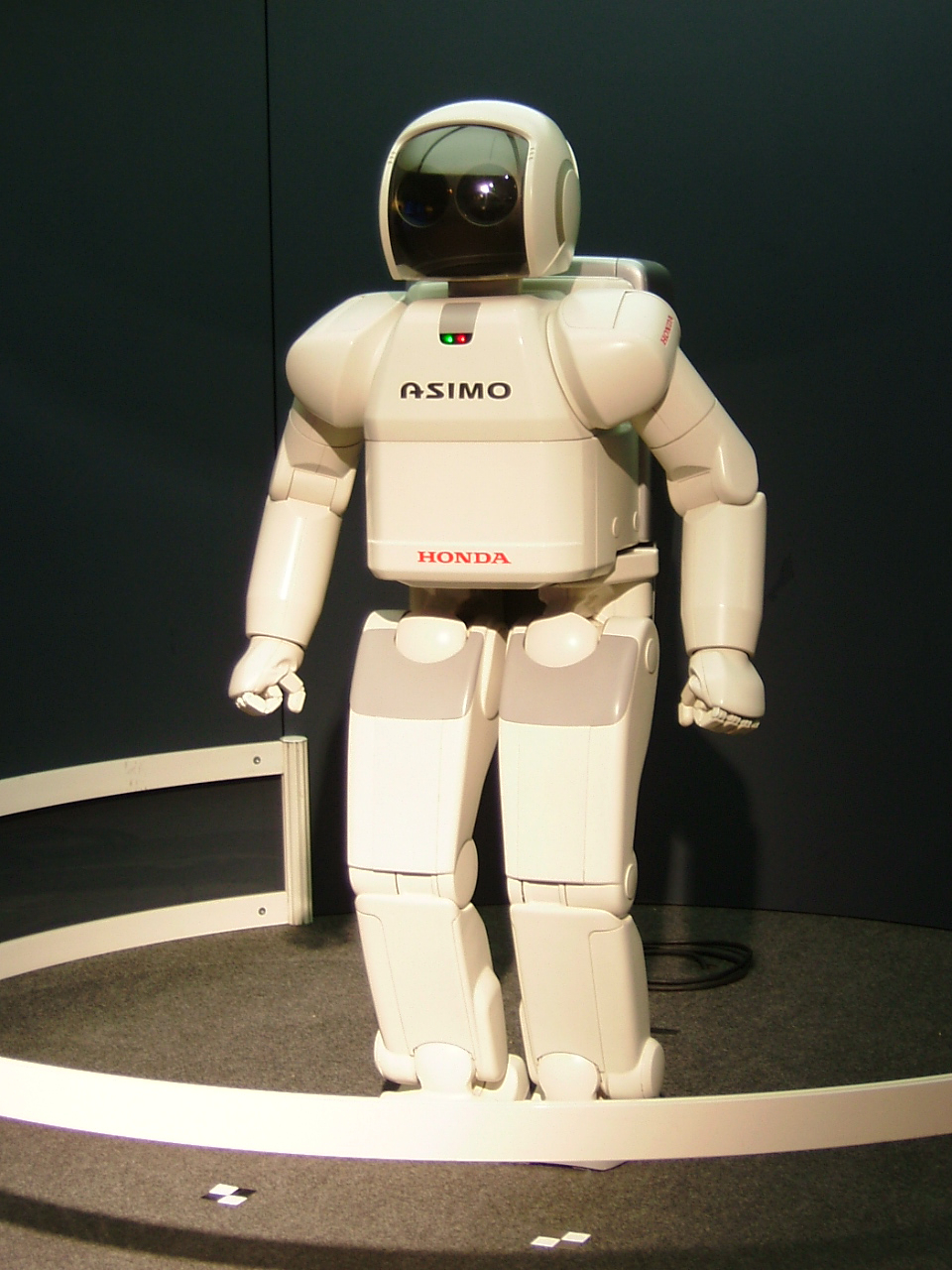
 Le robot ASIMO dans sa 1re version
Le robot ASIMO dans sa 1re versionLa mise au point de Asimo a débuté en l’an 2000. Beaucoup plus petit que ses prédécesseurs, sa taille est mieux adaptée à l’environnement humain. De plus, l'amplitude de mouvement a été améliorée. Ainsi, les bras d'Asimo peuvent faire un angle de 105°, alors que le P3 ne pouvait faire qu'un angle de 90°. De même, l'amplitude au niveau des épaules a été augmentée de 15%. Sa liberté de mouvement est telle qu'il lui est possible de danser.
Caractéristiques techniques Hauteur 120 cm Largeur 44 cm Longueur 45 cm Poids 52 kg Vitesse 1,6 km/h Autonomie 30 minutes Degrés de liberté de mouvement 29 Asimo a aussi une grande habileté manuelle. En effet, la pression dans ses doigts est de 0,5 kg, et son pouce opposé à ses quatre autres doigts, rendant possible la manipulation d'objets aussi complexes à manier qu'un journal ou un téléphone portable.
Le corps d'Asimo est constitué d'un alliage de magnésium recouvert par une résine en plastique. L'ordinateur lui permettant de calculer ses mouvements et de répondre aux événements extérieurs, est situé dans son dos, tel un sac à dos.
La 2e version d’ASIMO (Next-Generation ASIMO)
Le 15 décembre 2004, Honda présente une nouvelle génération de son robot Asimo. Ainsi, le robot ASIMO a maintenant la possibilité de courir à une vitesse de 3 km/h, en quittant le sol pendant des intervalles de 0,05 seconde. De plus, son design a été légèrement revu et affiné. Enfin, l’intelligence artificielle a été améliorée sur de nombreux points :
- mémoire ;
- capacités de calcul ;
- identification des objets mobiles ;
- identification des gestes
- il lui est possible de serrer la main d'une personne quand celle-ci le sollicite, tout en gérant sa force
- reconnaissance vocale (possibilité de distinguer les voix et les bruits parasites) ;
- reconnaissance des visages et des êtres humains (suivre une personne, saluer une personne qui s'approche, s'adresser à une personne par son nom);
- connexion à Internet (Asimo peut se connecter à Internet et ainsi accéder aux dernières informations).
Caractéristiques techniques Hauteur 130 cm Largeur inconnue Longueur inconnue Poids 54 kg Vitesse (marche normale) 2,5 km/h Vitesse (en course) 3 km/h Autonomie 1 heure Degrés de liberté de mouvement 34 Sur le plan du design, l'unité centrale volumineuse qu'il porte dans son dos a été miniaturisée et son intégration a été améliorée. Enfin, ses articulations ont été affinées (notamment au niveau des bras), et lui permettent encore plus de types de mouvements. Mais c'est davantage au niveau de ses capacités d'interactions avec les êtres humains que les efforts des ingénieurs se sont focalisés, Asimo étant destiné avant tout à s'adapter à l'environnement humain.
La 3e version d’ASIMO (New ASIMO)
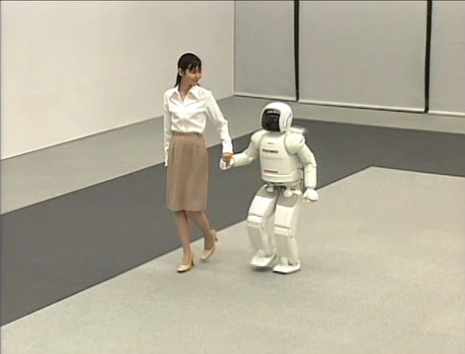
 ASIMO marchant en tenant la main d'une personne. (Design des versions 2 et 3 d’ASIMO)
ASIMO marchant en tenant la main d'une personne. (Design des versions 2 et 3 d’ASIMO)Le 13 décembre 2005, Honda lance une nouvelle génération d'ASIMO.
Dans sa troisième version, le robot ASIMO a la possibilité de courir à une vitesse de 6 km/h, en quittant le sol pendant des intervalles de 0,08 seconde, et sans qu’aucune de ses jambes ne touche le sol alors qu’il avance sur une longueur de 50 mm. Il lui est aussi désormais possible de courir à 5 km/h en suivant une trajectoire circulaire de rayon 2,5 m.
Les modifications les plus importantes touchent son intelligence artificielle, qui a été améliorée dans le but de le rendre plus interactif avec son environnement :
- Capacité à remplir la tâche de réceptionniste ou de guide d’information
- Capacité à tenir quelqu’un par la main et à se déplacer en synchronisme avec elle
- Capacité de manœuvrer et de corriger la trajectoire d’un chariot dont le poids peut aller jusqu'a 10 kg. De même, il peut transporter un plateau-repas en gardant ses bras parfaitement à l'horizontale.
Caractéristiques techniques Hauteur 130 cm Largeur 45 cm Longueur 37 cm Poids 54 kg Vitesse (marche normale) 2,7 km/h Vitesse (en course) 6 km/h Vitesse (en portant un objet d’1kg) 1,6 km/h Autonomie 40 minutes
(en marchant)Degrés de liberté de mouvement 34 - tête
- bras
- mains
- tronc
- jambes
- 1
- 7*2
- 2*2
- 3
- 6*2
D'après les ingénieurs de Honda, ASIMO aurait à ce stade, un niveau d'intelligence comparable à un enfant de trois ans et une habileté physique d'un enfant de dix ans. De plus, même s'il n'est toujours pas commercialisé, Asimo est disponible en location dans cette 3e version pour un prix d'environ 170 000 dollars US par an.
La 4 e version d’Asimo
Le 15 Décembre 2007, Honda dévoile une nouvelle version de son robot humanoïde Asimo. Reliés entre eux par une connexion Wi-Fi, ils peuvent désormais se coordonner pour réaliser leurs tâches. Ainsi, si un robot doit arrêter d'effectuer une mission pour aller recharger ses batteries (ce qu'il peut maintenant faire par lui même), un autre prendra automatiquement sa place. De même, s'il faut accomplir une action dans un lieu précis, c'est l'Asimo le plus proche de cette destination qui se mettra automatiquement en route.
D'autres nouvelles fonctionnalités ont été mises en place par Honda, comme la capacité pour le robot d'éviter quelqu'un se trouvant sur son trajet. Des vidéos sont disponibles sur le site officiel de Honda [1]
L'interface cérébrale homme/machine
Honda a développé un appareil permettant de contrôler Asimo par la pensée. Cette machine mesure l'activité du cerveau pour en déduire le mouvement qu'Asimo devra reproduire[2].
Notes et références
- ↑ Asimov est l'auteur de nombreux livres de science-fiction sur le thème de la robotique et créateur des trois lois de la robotique
- ↑ http://world.honda.com/news/2009/c090331Brain-Machine-Interface-Technology/
Voir aussi
Articles connexes
- Robot | Androïde
- Qrio - Le robot humanoïde de Sony
- Hubo - Le robot humanoïde coréen du KAIST
- Wakamaru - Le robot humanoïde de Mitsubishi
- HRP-2 - Le robot humanoïde de Kawada Industries
- SHINPO - Le robot humanoïde de la société TMSUK
- RI-MAN - Le robot humanoïde du centre de recherche RIKEN
- Nao, Le projet de robot humanoïde français, de la société Aldebaran Robotics
Liens externes
 Portail de la robotique
Portail de la robotique
Catégorie : Robot humanoïde
Wikimedia Foundation. 2010.