- MIL-STD-1553
-
MIL-STD-1553 est une norme décrivant un bus de communication largement utilisé en avionique militaire.
Elle a été développée sous l'égide du DoD américain à partir de 1968. La première version MIL-STD-1553A a été publiée en 1975. La version actuelle est la MIL-STD-1553B datant de 1978.
Elle a également été adoptée par l'OTAN sous l'appellation STANAG 3838.
Sommaire
Architecture
Le MIL-STD-1553 décrit un bus de données série multiplexé (half-duplex). La connexion est réalisée par l'intermédiaire d'une paire torsadée blindée par bus.
Le standard définit la présence de 2 bus (A et B) afin d'assurer la redondance.
Il y a 3 types d'équipements connectés au bus :
- Le gérant de bus ou « Bus Controller » (BC) dirige les différents échanges sur le bus,
- Les abonnés ou « Remote Terminal » (RT) qui utilisent le bus pour communiquer. Il peut il y en avoir jusqu'à 31 (limitation liée à l'adressage),
- Les moniteurs de bus ou « Bus Monitor » (BM) qui permettent « d'écouter » le bus. Il peut il y en avoir plusieurs ou aucun.

Interface électrique
Caractéristiques du câble
La paire blindée doit avoir plusieurs caractéristiques[1] :
- La capacité entre les 2 fils ne doit pas excéder plus de 98.4pF/m,
- Le nombre de torsions (rotation de 360° des 2 fils) ne doit pas excéder 13/m,
- L'impédance doit être comprise entre 70Ω et 85Ω pour une fréquence 1MHz (Z0),
- L'atténuation ne doit pas excéder 4.92dB/100m,
- Le blindage du câble doit couvrir plus de 75% de ce dernier.
Les 2 extrémités du câble doivent être connectées à des résistances égales à celle du câble (Z0) ± 2%.
Couplage au câble
Couplage direct
le couplage direct consiste à connecter les RT directement sur le bus, sans passer par un transformateur. Ce couplage est le plus simple mais, ne supporte que des connexions courtes (inférieures à 30,48 cm, soit un pied).
Couplage par transformateur
Le couplage par transformateur consiste à se connecter au bus via un transformateur. Cette méthode permet des longueurs de connexion plus importantes, jusqu'à 30 pieds, soit près de 10 mètres.
Encodage des bits
L'encodage utilisé est de type Manchester II biphasé :
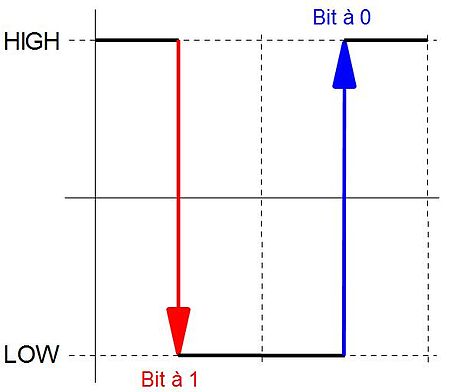
Niveaux
Temps et vitesse
La vitesse de transmission est de 1Mbit/s[2] :
- La stabilité à court terme (<1s) doit être inférieure à 0.01%,
- La stabilité à long terme doit être inférieure à 0.1%.
Protocole
- 31 RT peuvent être connectés sur un bus avec les adresses de 0 à 30. L'adresse 31 est réservé aux messages de diffusion générale dits "broadcast".
- Chaque RT est composé de 30 sous-adresses (SA).
- Le BC réalise le transfert par une commande soit BC-RT (envoi de données au RT ou "receive") soit RT-BC (récupération de données provenant du RT ou "transmit").
- Le BC peut aussi opérer des transferts RT-RT.
- Le BC peut également opérer des transferts de type "broadcast", avec un message ciblant tous les RT configurés pour accepter le "broacast". Ce type de transfert permet donc d'envoyer simultanément le même message à plusieurs RT.
- La commande de transfert indique combien de mots, de 16 bits, vont être transmis. Un maximum de 32 mots peuvent être transmis en un échange.
- Un mot de statut (ou SW) accompagne chaque échange.
- Outre les commandes de transferts, le BC peut émettre des commandes telle que "Synchronize", "Transmiter shutdown", "Build in test", etc.
Mots

Les mots de 16 bits sont encapsulés dans 20 bits décomposables en trois parties[3] :
- Les bits 1 à 3 premiers servent de synchronisation,
- Les bits 4 à 19 (16 bits) composent le mot proprement dit,
- Le bit 20 est un bit de parité.
Ordre de transmission
Dans un mot, les bits sont transmis en commençant par le bit nommé "bit time n°1" de poids fort, les autres suivent par ordre de force décroissante (bit time n°2, bit time n°3, ...) jusqu'au bit time n°20[4].
De la même manière, si une donnée est codée sur plus de 16 bits, et qu'on doit utiliser plusieurs mots pour la transmettre, c'est le mot contenant les bits de poids forts qui doit être émis en premier.
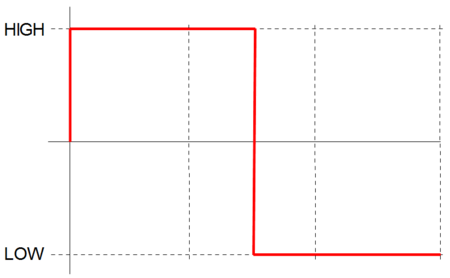
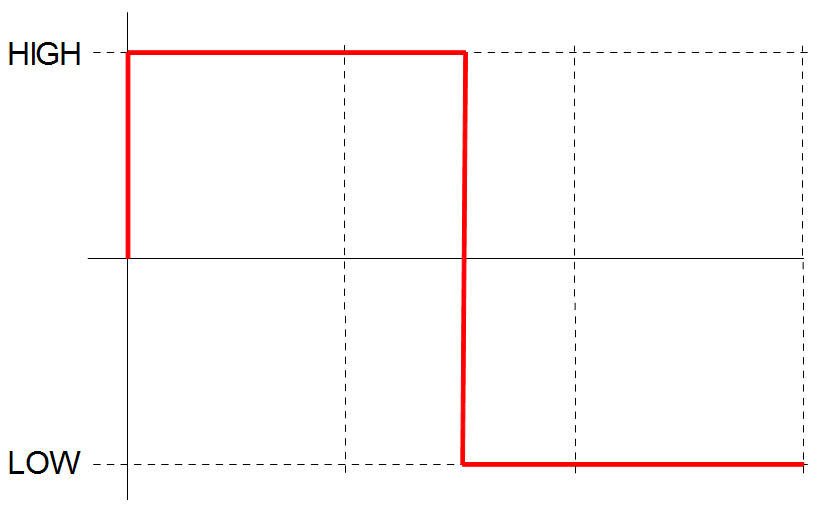
Synchronisation
La synchronisation est réalisé par une violation du code Manchester sur les premiers 3 bits de la trame.
Elle consiste à placer le bus au niveau HIGH pendant le temps équivalent à 1.5 bit puis au niveau LOW durant le 1.5 bit restant :
Mot de commande
Les bits 1 à 3 constituent la synchro, les bits 4 à 8 définissent l'adresse du RT, le bit 9 indique si le RT doit être en transmit ou en receive, les bits 10 à 14 sont utilisés soit comme sous adresse du RT, soit en mode control, les bits 15 à 19 sont utilisés soit comme définissant le nombre de mots soit le mode code, le bit 20 est le bit de parité.
Mot de données
Les bits 1 à 3 constituent la synchro, les bits 4 à 19 définissent le mot de données de 16 bits ,le bit 20 est le bit de parité.
Mot de statut
Les bits 1 à 3 constituent la synchro, les bits 4 à 8 définissent l'adresse du RT, le bit 9 défini le message error bit, le bit 10 est l'instrumentation bit, le bit 11 est le service request bit, les bits 12 à 14 sont réservés, le bit 15 est le Broadcast command received bit, le bit 16 est le busy bit, le bit 17 est le subsystem flag, le bit 18 est le dynamic bus control acceptance bit, le bit 19 est le terminal flag bit, le bit 20 est le bit de parité.
Parité
Le bit de parité est utilisé pour vérifier que le mot n'a pas été altéré pendant la transmission[5].
La parité est définie comme étant impaire (odd). Si le nombre de bits d'Information à "1" est paire, le bit de Parité sera à "1". À l'inverse si ce nombre est impaire il sera mis à "0".
Ce mécanisme simpliste ne permet pas de se prémunir contre l'altération de 2 bits puisque dans ce cas on retombe sur la parité impaire.
Avantages/Inconvénients
Avantages
- Il est déterministe puisque qu'il possède un gérant de bus.
- Il est robuste aux perturbations,
- Il est bien adapté à sa mission dans son environnement d'avionique même si, après 30 ans, il commence à montrer ses limites en termes de débit et d'adressage,
- Il existe un manuel définissant les modalités d'implantation, de qualification et de test : MIL-HDBK-1553.
Inconvénients
Anecdotes
- L'adresse des RT est lue une seule fois lors de leur mise sous tension. Cette règle est la conséquence de pertes d'adresse survenues dans les premières version du bus. Ces pertes d'adresse étaient dues aux vibrations engendrées par l'usage des armes de bord sur des hélicoptères de combat.
- Ce bus est utilisé dans le métro londonien[6].
- Ce bus est utilisé dans certains satellites de télécommunication et d'observation.
Références
Liens externes
- (en) La norme MIL-STD-1553B, 21/09/78. Consulté le 19/12/10
- (en) http://www-corot.obspm.fr/COROT-ETC/Files/1553_overview.pdf. Consulté le 19/12/10
 Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique Portail de l’aéronautique
Portail de l’aéronautique Portail des télécommunications
Portail des télécommunications

Wikimedia Foundation. 2010.