- Angles d'euler
-
Angles d'Euler
 Pour les articles homonymes, voir Euler.
Pour les articles homonymes, voir Euler.Le mouvement d'un solide par rapport à un référentiel fait intervenir 6 paramètres, qui sont, par exemple, les trois coordonnées décrivant la position de son centre de masse (ou d'un point quelconque du solide) et trois angles, nommés les angles d'Euler, cf. le schéma ci-contre. Les angles d'Euler peuvent aussi servir à représenter l'orientation d'un solide par rapport à un repère ; on peut les voir comme une généralisation des coordonnées sphériques.
Sommaire
Mécanique du solide
On s'intéresse seulement ici à la description du mouvement du solide en rotation quelconque autour du point O, qui peut être un point fixe du solide dans le référentiel de référence Oxyz ou le centre de masse.
Les angles d'Euler sont choisis de façon à permettre une mémorisation simple de la construction du vecteur rotation instantané du solide, nécessaire à l'étude de la cinématique du solide.
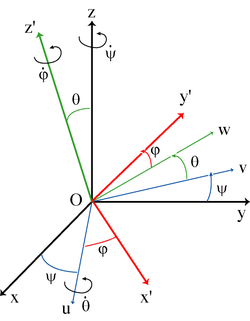
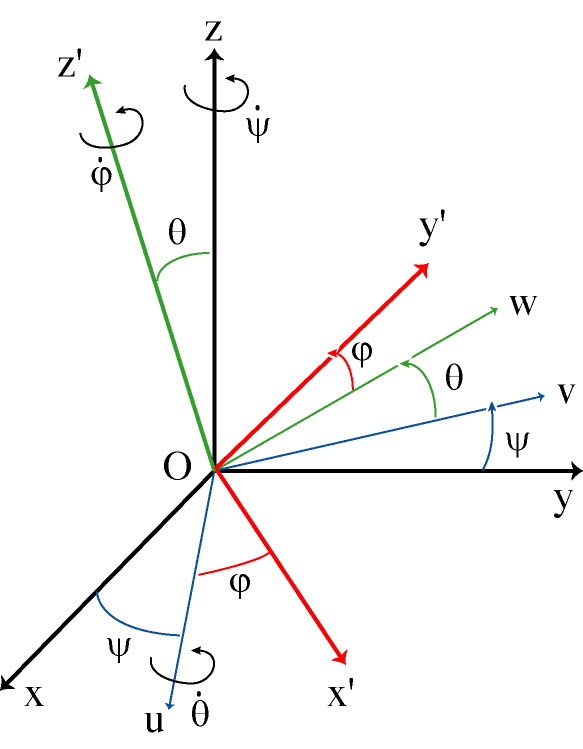
On passe du référentiel fixe Oxyz au référentiel lié au solide Ox'y'z' par trois rotations successives.
- La précession ψ, autour de l'axe Oz, fait passer de Oxyz au référentiel Ouvz.
- La nutation θ, autour de l'axe Ou, fait passer de Ouvz à Ouwz'.
- La rotation propre
 , autour de l'axe Oz', fait passer de Ouwz’ au référentiel lié au solide Ox'y'z’.
, autour de l'axe Oz', fait passer de Ouwz’ au référentiel lié au solide Ox'y'z’.
NB. L'axe Ou est porté par l'intersection des plans Oxy et Ox'y'
Dans ces conditions le vecteur rotation instantané du solide est donné par la simple somme :
 ,
,
où les vecteurs apparaissant dans le membre de droite sont les vecteurs unitaires des axes correspondants. On remarquera que l'expression simple précédente utilise une base non orthogonale.
L'utilisation de ces angles est très générale en mécanique et en astronomie, par exemple pour décrire le mouvement du gyroscope.
Orientation cristalline
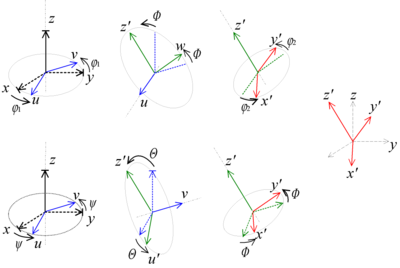
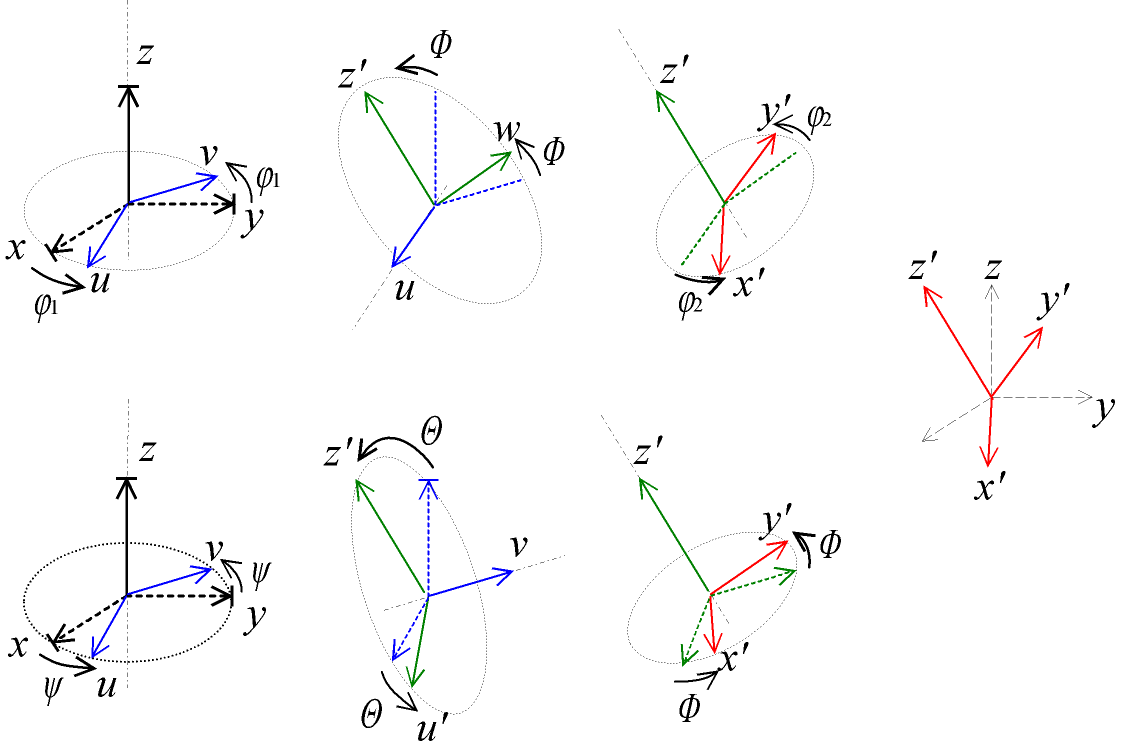
En science des matériaux, les angles d'Euler sont utilisés pour décrire l'orientation cristalline (orientation d'un cristallite par rapport aux axes de l'échantillon), notamment dans le domaine de la texture (orientation préférentielle). Les angles sont alors en général[1] notés (φ1,Φ,φ2) avec :
- φ1 = ψ
- Φ = θ
- φ2 = φ
On utilise également parfois une autre variante dans laquelle la seconde rotation (nutation) se fait selon l'axe Ov au lieu de Ou ; les angles sont alors notés (Ψ,Θ,Φ) sans que cela ait un rapport avec les notations des mécaniciens, ce qui n'est pas sans risque de confusion.
Notes
- ↑ il s'agit de la notation adoptée par Bunge dans son ouvrage Texture analysis in materials science, une référence dans le domaine
Voir également
Lien externe
Une animation des angles d'Euler
 Portail de la physique
Portail de la physique Portail de la géométrie
Portail de la géométrie
Catégories : Mécanique du solide | Système de coordonnées | Angle
Wikimedia Foundation. 2010.