- Faire un point
-
Navigation côtière
La navigation côtière rassemble l'ensemble des méthodes de navigation maritime utilisées lorsqu'un navire navigue en vue de terre, et venant du large, après avoir atterri.
La navigation côtière est une navigation relative où l'on se situe par rapport à des points caractéristiques sur la côte (et non en coordonnées géographiques).
Le principal souci en navigation côtière est d'éviter les dangers représentés par la côte, les récifs et les hauts-fonds.
La navigation côtière s'appuie sur de nombreuses aides représentés par la signalisation maritime (surtout abondante sur les côtes des pays développés), le balisage cardinal en mer, latéral dans les chenaux.
Sommaire
En navigation côtière, les systèmes de positionnement par satellite (GPS ou GLONASS), même couplés à une carte électronique, doivent être utilisés avec une grande prudence, car :
- la référence géodésique de la carte marine n'est pas toujours celle du système satellitaire ;
- la plupart des relevés des cartes marines ont été effectués avant l'apparition de ces systèmes.
Ces erreurs peuvent s'additionner et excéder plusieurs centaines de mètres, quand bien même on navigue avec un GPS différentiel précis à 10 mètres près.
C'est pourquoi, il importe, en navigation côtière, de toujours se situer en relatif (azimut/distance par rapport à un amer) et d'utiliser ces méthodes traditionnelles, surtout en eaux resserrées et chenalage.
Détermination de la position
La base de la navigation côtière est le point par triangulation optique ou radar (points par trois relèvements ou trois distances et leurs variantes ou combinaisons)
Point par trois relèvements
 Point par trois relèvements
Point par trois relèvements
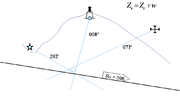
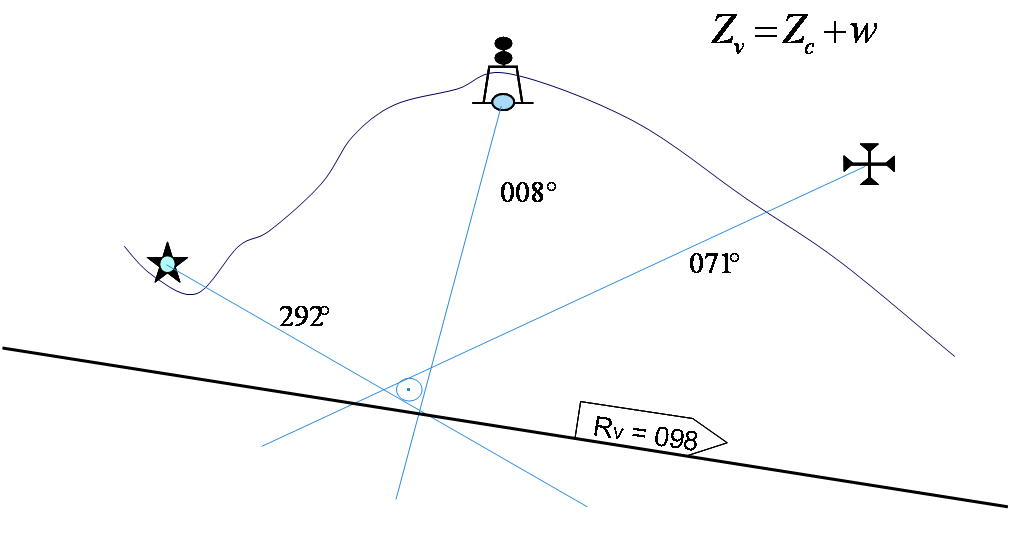
Il consiste à :
- identifier les amers que l'on souhaite utiliser - si possible, sur l'avant de sa route[1] et avec un écart angulaire entre eux suffisant (compris en gros entre 30 et 150°) pour donner au point une bonne précision - en les repérant à la fois sur la carte de navigation et sur l'horizon ;
- mesurer au compas de relèvement les azimuts (Zc) de ces amers en mesurant le relèvement traversier (celui qui défile le plus vite) en dernier ;
- apporter la correction due au compas utilisé pour obtenir l'azimut vrai (Zv) : Zv = Zc + W ( W est la variation du compas ; s’il s'agit d'un compas gyroscopique, en général W = 0 ; dans le cas d'un compas magnétique W = D + δ : somme de la déclinaison magnétique et de la déviation propre au compas) ;
- tracer sur la carte à l'aide d'une règle-rapporteur (règle Cras) l'azimut vrai depuis[2] chacune des positions des amers correspondants; l'intersection des trois droites obtenues définit un triangle, plus ou moins grand en fonction de la précision des relevés, de la vitesse de déplacement et de la rapidité de la mesure ;
- le centre de ce triangle définit la position (le point) du navire à l'heure du relevé.
variante :
- Si l'on coupe l'alignement de deux amers, ou si l'on suit cet alignement, le point peut être obtenu avec un seul relèvement.
Point avec un seul amer
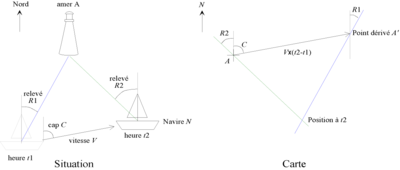
Si l'on ne dispose que d'un seul amer visible, la méthode consiste à relever cet amer[3] à intervalles réguliers (cet intervalle de temps dépendant de la vitesse du navire et de la distance de l'amer) et considérer l'amer comme se déplaçant sur la carte à la route et à la vitesse du navire. Il suffit alors de tracer les azimuts depuis les positions (fictives) successives de l'amer dans l'ordre inverse des heures de relevés.
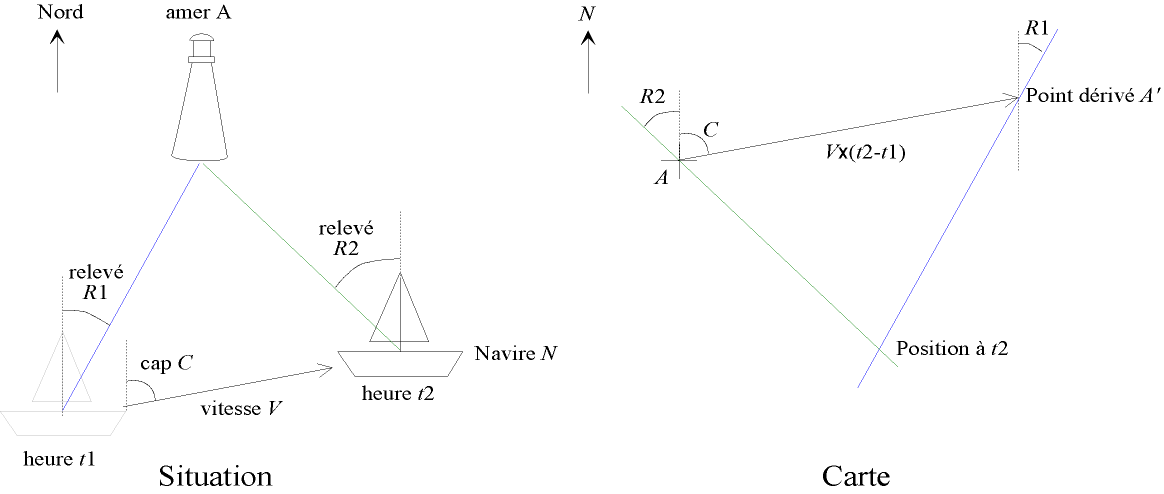
 Navigation par relèvement à un amer
Navigation par relèvement à un amerDans la pratique :
- on trace un segment de droite ayant la direction du déplacement, ayant pour origine le point visé (l'autre extrémité étant dans le sens du mouvement), et pour longueur la distance parcourue ; on a ainsi l'emplacement qu'aurait le point de référence s'il avait bougé comme le navire, nous l'appelons « point dérivé » ;
- on trace la direction du second relevé à partir du point de référence ;
- on trace la direction du premier relevé à partir du point dérivé ;
l'intersection de ces droites donne l'emplacement du navire.
Point radar
Le radar de navigation permet une navigation sans aucune visibilité. Les relèvements indiqués par un radar de navigation ne sont pas précis, par contre les distances le sont.
La méthode est la même qu'un point par relèvements en utilisant des distances :
- choix de points caractéristiques de la côte au radar (cap, îlot, balise, trait de côte particulier) ;
- relevés de leurs distances ;
- tracé avec une pointe sèche sur la carte d'arcs de cercles de rayons égaux aux distances relevées. L'intersection de ces arcs dessinent un «triangle» ;
- le centre de ce «triangle» définit la position (le point) du navire à l'heure du relevé.
variantes :
- point avec un relèvement et deux distances ;
- point avec deux relèvements et une distance.
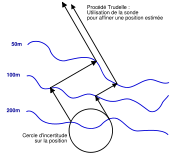
Point par franchissement d'isobathes
- Si le relief du fond est suffisamment caractéristique[4], il est possible en choisissant sa route en coupant des isobathes successives à angle droit de faire un point en reportant (report d'estime) ces lignes sur la dernière ligne franchi. Cette méthode est imprécise car elle est dépendante de son estime, de l'intervalle de temps entre le passage entre deux isobathes et bien sûr de la précision du relevé sur la carte.
- Méthode Trudelle (voir schéma) pour réduire le cercle d'incertitude sur la position.
Détermination de sa route
La route, préparée et tracée sur la carte (ou le récepteur GPS), tient donc compte de ses éléments, des distances de sécurité que l'on s'accorde, de la profondeur inscrite sur la carte et éventuellement du calcul de la marée et de la profondeur d'eau minimale de sécurité que l'on souhaite conserver sous la quille en toutes circonstances (appelée « pied de pilote »).
La principale règle de sécurité est de naviguer toujours sur la carte à la plus grande échelle disponible[5] et d'adopter la « règle du pouce » qui consiste à tracer sur cette carte une route qui ne s'approche pas à moins d'un pouce d'un danger[6].
Les amers sur la côte permettent par ailleurs de tracer sur la carte des relèvements de garde (ou des distances de garde au radar), s'assurant ainsi s’il n'est pas franchi de ne pas arriver dans une zone dangereuse. Choisir une route à relèvement constant sur un amer est également très sûr. Deux amers alignés permettent une navigation par alignements, particulièrement pratique et sûre dans un chenal.
Ces distances de sécurité dépendent des caractéristiques du navire (tirant d'eau, vitesse et, en eaux resserrées, longueur et rayon de giration) et aussi de l'environnement (conditions météorologiques et de visibilité, balisage, amers particuliers). Le pied de pilote dépend également des caractéristiques du navire, des conditions de mer et de houle, de la fiabilité à accorder aux relevés de sonde de la carte. Un sondeur permet de contrôler la profondeur effective sous la quille.
Le calcul des marées
Article détaillé : Calcul de marée.Dans les eaux soumises à la marée, un calcul de marée est effectué par le navigateur pour déterminer où et quand une route ou un passage est praticable en toute sécurité.
Les mers soumises à la marée comportent également des courants variables qui peuvent accélérer ou ralentir le bateau et dans certains endroits resserrés lever une mer dangereuse. Ce phénomène doit être intégré dans les calculs du navigateur.
Notes
- ↑ ce qui s'appelle « naviguer sur l'avant » : regarder dans la direction vers laquelle on se dirige est toujours plus sûr, quand on est en mouvement, que regarder vers l'arrière !
- ↑ théoriquement on devrait tracer l'azimut à 180° ; il suffit en pratique de pointer la règle Cras vers l'amer
- ↑ on observe le « défilement » de l'amer
- ↑ il va de soi que si les isobathes sont parallèles, cette méthode s'avère impossible)
- ↑ Attention : zoomer la carte électronique serait une fausse sécurité!
- ↑ cette règle du pouce s'avère souvent impossible à appliquer en eaux resserrées ou en chenalage, où on naviguera généralement à relèvement constant sur un amer ou mieux sur alignement
Voir aussi
Articles connexes
 Portail du monde maritime
Portail du monde maritime Portail de l’aéronautique
Portail de l’aéronautique
Catégorie : Navigation

Wikimedia Foundation. 2010.