- Denavit-Hartenberg
-
Denavit et Hartenberg (D-H) est une convention[précision nécessaire] habituellement utilisée pour choisir le système de référence en robotique. Elle fut introduite[Quand ?] par Jacques Denavit et Richard S. Hartenberg. Selon cette convention, chaque transformation[précision nécessaire] est représentée comme le produit de quatre transformations basiques.
Pour définir ces transformations, il est tout d'abord nécessaire de définir les axes des liaisons :
- Les axes
 sont suivant les axes des liaisons.
sont suivant les axes des liaisons. - Les axes
 sont parallèles à la normale commune à
sont parallèles à la normale commune à  et soit :
et soit :  .
. - Les axes
 sont choisi de manière à former un trièdre direct avec les axes et .
sont choisi de manière à former un trièdre direct avec les axes et .
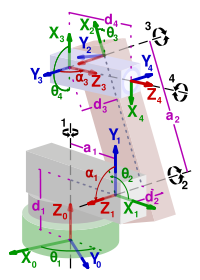 Exemple de la chaîne cinématique d'un robot avec système de coordonnées et paramètres selon Denavit&Hartenberg.
Exemple de la chaîne cinématique d'un robot avec système de coordonnées et paramètres selon Denavit&Hartenberg.
Chaque transformation entre deux corps successifs est donc décrite par quatre paramètres :- d, la distance selon l'axe entre les axes
 et
et 
- θ, l'angle entre autour de l'axe
 entre les axes et
entre les axes et - r, la distance selon l'axe entre les axes et . C'est donc également la longueur de la normale commune.
- α, l'angle entre autour de l'axe entre les axes et
En multipliant les matrice de rotation et de translation élémentaire, on peut obtenir la transformation globale entre deux liaisons successives qui s'écrit :
 .
.
On peut calculer formellement la matrice inverse :
Articles connexes
- Les axes

Wikimedia Foundation. 2010.