- Convertisseur Buck
-
Un convertisseur Buck, ou hacheur série, est une alimentation à découpage qui convertit une tension continue en une autre tension continue de plus faible valeur.
Sommaire
Applications
Ce type de convertisseur est utilisé pour des applications que l'on peut classer en deux catégories :
- Les applications visant à obtenir une tension continue fixe (et parfois régulée) à partir d'un générateur de tension continue supérieure.
- Conversion des 12-24V fournis par une batterie d'ordinateur portable vers les quelques Volts nécessaires au processeur.
- Conversion de la tension du secteur redressée en continue fixe.
- Les applications permettant d'obtenir une tension réglable mais toujours inférieure à celle présente à l'entrée.
- Variateur de tension continue.
Pour ces deux catégories d’application, on souhaite également que l'impédance interne du système ainsi créée soit faible - du même ordre de grandeur que celle du générateur qui alimente le dispositif - ce qui interdit l'usage d'un diviseur de tension dissipant sous forme de chaleur l'excès de tension et possédant un faible rendement ce qui est rédibitoire pour les applications d'électronique de puissance.
Un convertisseur Buck bien conçu possède un fort rendement (jusqu'à 95%) et offre la possibilité de réguler la tension de sortie.
Principe de fonctionnement
 Fig. 1:Schéma de base d'un convertisseur Buck
Fig. 1:Schéma de base d'un convertisseur Buck
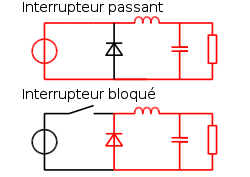 Fig. 2: Les deux configurations d'un convertisseur Buck suivant l'état de l'interrupteur S
Fig. 2: Les deux configurations d'un convertisseur Buck suivant l'état de l'interrupteur SLe fonctionnement d'un convertisseur Buck peut être divisé en deux configurations suivant l'état de l'interrupteur S (voir figure 2) :
- Dans l'état passant, l'interrupteur S (voir figure 1) est fermé, la tension aux bornes de l'inductance vaut VL = Vi − Vo. Le courant traversant l'inductance augmente linéairement. La tension aux bornes de la diode étant négative, aucun courant ne la traverse.
- Dans l'état bloqué, l'interrupteur est ouvert. La diode devient passante afin d'assurer la continuité du courant dans l'inductance. La tension aux bornes de l'inductance vaut VL = − Vo. Le courant traversant l'inductance décroît.
Conduction continue
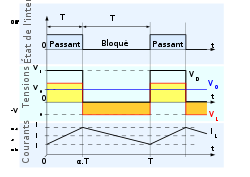 Fig. 3:Formes d'ondes courant/tension dans un convertisseur Buck
Fig. 3:Formes d'ondes courant/tension dans un convertisseur BuckQuand un convertisseur Buck travaille en mode de conduction continue, le courant IL traversant l'inductance ne s'annule jamais. La figure 3 montre les formes d'ondes du courant et de la tension dans un convertisseur Buck.
Le taux d'accroissement de IL est donné par :

Avec VL égale Vi − Vo pendant l'état passant et − Vo durant l'état bloqué. Par conséquent, l'augmentation de IL durant l'état passant est donnée par :

De même, la baisse du courant dans l'inductance durant l'état bloqué est donnée par :

Si on considère que le convertisseur est en régime permanent, l'énergie stockée dans chaque composant est la même au début et à la fin de chaque cycle de commutation. En particulier, l'énergie stockée dans l'inductance est donnée par :

En conséquence, le courant IL traversant l'inductance est le même au début et à la fin de chaque cycle de commutation. Ce qui peut s'écrire de la façon suivante :

En remplaçant
 et
et  par leur expression, on obtient :
par leur expression, on obtient :
Ce qui peut se réécrire de la façon suivante :

Grâce à cette équation, on peut voir que la tension de sortie varie linéairement avec le rapport cyclique. Le rapport cyclique étant compris entre 0 et 1, la tension de sortie Vo est toujours inférieure à celle d'entrée. C'est pour cela que l'on parle parfois de dévolteur.
Conduction discontinue
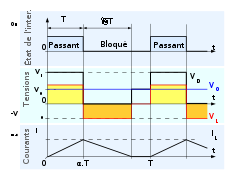 Fig. 4:Formes d'ondes courant/tension dans un convertisseur Buck en conduction discontinue.
Fig. 4:Formes d'ondes courant/tension dans un convertisseur Buck en conduction discontinue.Dans certains cas, la quantité d'énergie demandée par la charge est assez faible pour être transférée dans un temps plus court qu'une période de commutation. Dans ce cas, le courant traversant l'inducteur s'annule pendant une partie de la période. La seule différence avec le principe de fonctionnement décrit précédemment est que l'inductance est complètement déchargée en début de cycle (voir les formes d'ondes sur la figure 4). Bien que faible, la différence entre conduction continue et discontinue a un fort impact sur la formule de la tension de sortie. La tension de sortie peut être calculée de la façon suivante :
On considère toujours que le convertisseur a atteint le régime permanent. L'énergie stockée dans les composants est donc la même en début et en fin de cycle (elle est nulle dans le cas de la conduction discontinue). Cela engendre aussi que la tension moyenne aux bornes de l'inductance (VL) est nulle. Ceci se traduit sur la figure 4, par une égalité de l'aire des rectangles jaune et orange :

On peut en déduire la valeur de δ et non pas l,AUTRE :

En supposant que le condensateur de sortie est suffisamment important pour maintenir la tension de sortie constante pendant un cycle de commutation, le courant de sortie délivré à la charge (Io) est constant. Cela implique que le courant traversant le condensateur est de valeur moyenne nulle. Par conséquent, nous avons :

Avec
 le courant moyen traversant l'inductance. Comme on peut le voir sur la figure 4, le courant IL traversant l'inductance est de forme triangulaire. Par conséquent, la valeur moyenne de IL peut donc être calculée géométriquement de la façon suivante :
le courant moyen traversant l'inductance. Comme on peut le voir sur la figure 4, le courant IL traversant l'inductance est de forme triangulaire. Par conséquent, la valeur moyenne de IL peut donc être calculée géométriquement de la façon suivante :
Le courant dans l'inductance est nul en début de cycle puis augmente pendant
 jusqu'à atteindre ILmax. Cela veut dire que ILmax est égale à :
jusqu'à atteindre ILmax. Cela veut dire que ILmax est égale à :
En remplaçant ILmax dans les relations précédentes par son expression, on obtient :

On remplace δ par son expression :

Qui peut se mettre sous la forme :

On peut voir que l'expression de la tension de sortie est bien plus compliquée que celle obtenue pour la conduction continue. En effet, la tension de sortie dépend non seulement de la tension d'entrée (Vi) et du rapport cyclique α mais aussi de la valeur de l'inductance (L), de la période de commutaion (T) et du courant de sortie (Io).
Limite entre la conduction continue et discontinue
 Fig. 5:Évolution de la tension de sortie normalisée d'un convertisseur Buck avec un courant de sortie normalisé.
Fig. 5:Évolution de la tension de sortie normalisée d'un convertisseur Buck avec un courant de sortie normalisé.Comme expliqué dans le paragraphe précédent, le convertisseur fonctionne en conduction discontinue quand le courant demandé par la charge est faible, et il fonctionne en conduction continue pour les courants plus importants. La limite entre conduction continue et conduction discontinue est atteinte quand le courant dans l'inductance s'annule juste au moment de la commutation. Avec les notations de la figure 4, cela correspond à :

α + δ = 1
Dans ce cas, le courant de sortie Iolim (courant de sortie à la limite de la conduction continue et discontinue) est égal au courant moyen traversant l'inductance:

En remplaçant ILmax par son expression en conduction discontinue:

A la limite entre les deux modes de conduction, la tension de sortie obéit aux expressions des deux modes. On utilisera celle donnée pour le mode de conduction continue:
On peut donc réécrire Iolim de la façon suivante:

Introduisons deux nouvelles notations :
- La tension normalisée, définie par
 , qui correspond au gain en tension du convertisseur.
, qui correspond au gain en tension du convertisseur. - Le courant normalisé, défini par
 . Le terme
. Le terme  correspond à l'augmentation maximale de courant que l'on peut atteindre lors d'un cycle (variation du courant dans l'inductance atteinte pour α = 1). On obtient donc, en régime permanent,
correspond à l'augmentation maximale de courant que l'on peut atteindre lors d'un cycle (variation du courant dans l'inductance atteinte pour α = 1). On obtient donc, en régime permanent,  égale 0 quand le courant de sortie est nul, et 1 pour le courant maximum que peut fournir le convertisseur.
égale 0 quand le courant de sortie est nul, et 1 pour le courant maximum que peut fournir le convertisseur.
En utilisant ces notations, on obtient:
- En conduction continue,

- En conduction discontinue,
 ;
; - Le courant limite entre la conduction continue et discontinue est
 . Par conséquent, la frontière entre conduction continue et discontinue est décrite par:
. Par conséquent, la frontière entre conduction continue et discontinue est décrite par:  .
.
Cette courbe a été tracée sur la figure 5. La différence de comportement entre conduction continue et discontinue est très nette. Cela peut engendrer des problèmes d'asservissement de la tension de sortie.
Cas du circuit non-idéal
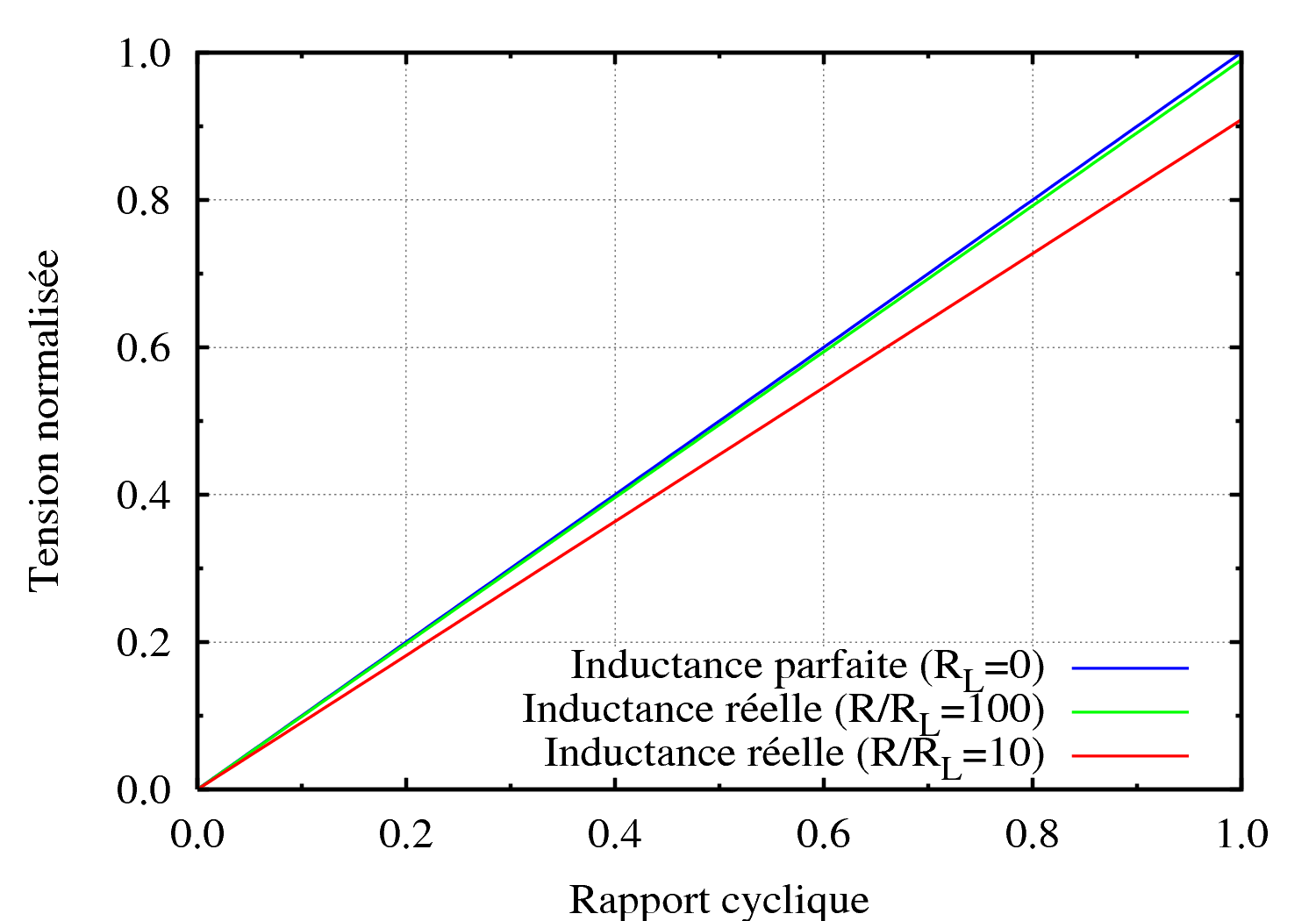
 Fig. 6: Évolution de la tension de sortie d'un convertisseur Buck en fonction du rapport cyclique quand la résistance parasite de l'inductance augmente.
Fig. 6: Évolution de la tension de sortie d'un convertisseur Buck en fonction du rapport cyclique quand la résistance parasite de l'inductance augmente.L'étude précédente a été faite avec les hypothèses suivantes:
- Le condensateur de sortie a une capacité suffisante pour fournir une tension constante, au cours d'un cycle de fonctionnement, à la charge (une simple résistance)
- La chute de tension aux bornes de la diode est nulle
- Pas de pertes par commutation dans les semi-conducteurs
- Pas de pertes dans les composants d'une manière générale
Ces hypothèses peuvent être très éloignées de la réalité, les imperfections des composants réels pouvant avoir des effets importants sur le fonctionnement du convertisseur.
Ondulation de la tension de sortie
L'ondulation de tension de sortie est le nom donné à l'augmentation de la tension de sortie à l'état passant et à la diminution de la tension lors de l'état bloqué. Plusieurs facteurs influent sur cette ondulation: la fréquence de fonctionnement du convertisseur, le condensateur de sortie, l'inductance, la charge mais aussi les caractéristiques du circuit de contrôle du convertisseur. En première approximation, on peut considérer que l'ondulation de tension résulte de la charge et de la décharge du condensateur de sortie:

Pendant l'état bloqué, le courant mentionné dans cette équation est le coutant traversant la charge. Durant l'état passant, ce courant désigne le différence entre le courant délivré par la source de tension et le traversant la charge. La durée (dT) est définie par le rapport cyclique α et la fréquence de découpage.
Pour l'état passant:

Pour l'état bloqué:

L'ondulation de tension diminue donc avec l'augmentation du condensateur de sortie ou de la fréquence de découpage. L'ondulation de tension est généralement fixée par le cahier des charges de l'alimentation à réaliser. Le choix du condensateur se fait sur des critéres de coûts, de volume disponible et aussi des caractéristiques des différentes technologie de condensateur. Le choix de la fréquence de découpage se fait suivant des critéres de rendement, le rendement ayant tendance à baisser avec l'augmentation de la fréquence de découpage. L'augmentation de la fréquence de découpage peut aussi pauser des problèmes de compatibilité électromagnétique.
L'ondulation de la tension de sortie et l'un des inconvénients des alimentations à découpage, et fait donc partie des critéres de mesure de qualité.
Structures spécifiques
Redressement synchrone
 Fig. 7: Schéma de principe d'un convertisseur Buck à redressement synchrone. La diode D du convertisseur Buck standard a été remplacée par un second interrupteur S2
Fig. 7: Schéma de principe d'un convertisseur Buck à redressement synchrone. La diode D du convertisseur Buck standard a été remplacée par un second interrupteur S2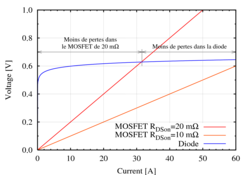 Fig. 8: Tension aux bornes d'une diode et d'un MOSFET. Pour les faibles courants, la nature résistive du MOSFET génère moins de pertes que la diode qui possède une chute de tension élevée, même pour de faibles courants. Mettre deux MOSFETs en parallèle réduit encore les pertes (courbe orange) alors que mettre des diodes en parallèle n'amenuisera pas la chute de tension.
Fig. 8: Tension aux bornes d'une diode et d'un MOSFET. Pour les faibles courants, la nature résistive du MOSFET génère moins de pertes que la diode qui possède une chute de tension élevée, même pour de faibles courants. Mettre deux MOSFETs en parallèle réduit encore les pertes (courbe orange) alors que mettre des diodes en parallèle n'amenuisera pas la chute de tension.Un convertisseur Buck synchrone est une version modifiée du convertisseur Buck classique dans laquelle on a remplacé la diode D par un second interrupteur S2 (voir figure 7). Cette modification permet d'augmenter le rendement du convertisseur car la chute de tension aux bornes d'un interrupteur est plus faible que celle aux bornes d'une diode (voir figure 8). Il est également possible d'augmenter encore le rendement en gardant la diode en parallèle du second interrupteur S2. La diode permet alors d'assurer le transfert d'énergie lors de la courte période ou les interrupteurs sont ouverts. L'utilisation d'un interrupteur seul est un compromis entre augmentation du coût et du rendement.
Hacheurs entrelacés
Applications
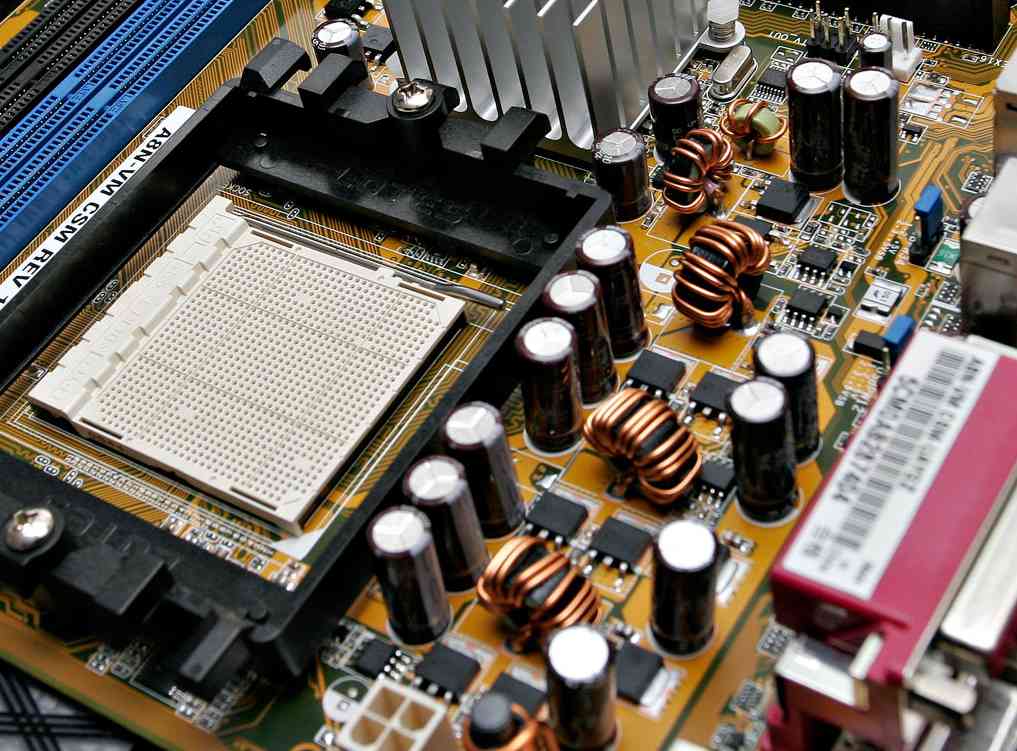
 Fig. 9: Vue rapprochée d'une alimentation pour processeur AMD sur Socket 939. Cette alimentation possède 3 convertisseurs Buck entrelacés. On peut distinguer au premier plan les 3 bobines toroïdales noires. La bobine plus petite sur le côté appartient à un filtre d'entrée.
Fig. 9: Vue rapprochée d'une alimentation pour processeur AMD sur Socket 939. Cette alimentation possède 3 convertisseurs Buck entrelacés. On peut distinguer au premier plan les 3 bobines toroïdales noires. La bobine plus petite sur le côté appartient à un filtre d'entrée.Les convertisseurs Buck sont couramment utilisés dans les ordinateurs afin de réduire la tension fournie par l'alimentation vers une tension plus faible (de l'ordre du Volt) nécessaire pour alimenter le CPU. Ces alimentations doivent fournir un fort courant (plus de 100 A) avec une faible ondulation de tension (moins de 10 mV) tout en restant dans un volume réduit.
Afin de réduire les contraintes sur les semi-conducteurs, ces alimentations utilisent plusieurs convertisseurs reliés en parallèle. On parle alors de hacheurs entrelacés car les convertisseurs conduisent à tour de rôle vers le même condensateur de sortie. La plupart des alimentations de cartes-mères utilisent 3 ou 4 branches en parallèle, mais les constructeurs de semi-conducteur proposent des composants pouvant gérer jusqu'à 6 branches en parallèle[1]. Afin d'augmenter le rendement, ces alimentations utilisent la aussi rectification synchrone.
Avantages
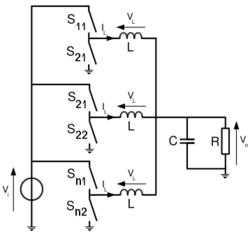 Fig. 10: Schéma de principe d'un convertisseur Buck entrelacé à n branches avec rectification synchrone.
Fig. 10: Schéma de principe d'un convertisseur Buck entrelacé à n branches avec rectification synchrone.Pour une alimentation possédant n convertisseurs reliés en parallèle (voir figure 8), le courant sera réparti sur les n phases, limitant ainsi les contraintes sur chaque interrupteur et augmentant la surface d'échange thermique. En outre, la fréquence des courants et tensions vus par la charge sera n fois supérieure à celle d'un convertisseur simple, divisant d'autant l'ondulation de tension en sortie[2].
L'entrelacement des convertisseurs apporte aussi un autre avantage: la réponse dynamique du système aux variations de courant peut être améliorée. En effet, une importante augmentation du courant demandé par la charge peut être satisfaite en faisant conduire simultanément plusieurs branches de l'alimentation si elle a été prévue pour cela.
Principe d'implémentation
Un des problèmes inhérent aux hacheurs entrelacés est de s'assurer que le courant est équitablement répartit sur les n branches de l'alimentation. La mesure du courant dans les branches peut se faire sans pertes par mesure de la tension aux bornes de la bobine ou du second interrupteur lorsqu'il est passant. Ces mesures sont qualifiées de sans pertes car elles utilisent les pertes internes aux composants pour effectuer leur mesure sans engendrer de pertes supplémentaires. Il est aussi possible d'effectuer cette mesure aux bornes d'une petite résistance que l'on aurait inséré dans le circuit. Cette méthode a l'avantage d'être plus précise que les deux précédentes mais elle pose des problèmes en termes de coûts, de rendement et d'espace.
La tension de sortie peut elle aussi mesurée sans perte à travers l'interrupteur supérieur. Cette methode est plus complexe à mettre en place qu'une mesure résistive car il faut filtrer le bruit engendré par les commutations mais elle a l'avantage d'être moins onéreuse.
Voir aussi
- Convertisseur Boost
- Convertisseur Buck-Boost
- Convertisseur Ćuk
- Convertisseur Flyback
- Convertisseur Forward
- Convertisseur SEPIC
Références
- NCP5316 4-5-6-phase converter datasheet
- Guy Séguier, Électronique de puissance, 7th edition, Dunod, Paris 1999
 Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique
- Les applications visant à obtenir une tension continue fixe (et parfois régulée) à partir d'un générateur de tension continue supérieure.








Wikimedia Foundation. 2010.