- Contrôle d'interdistance d'un convoi de véhicules
-
Le contrôle d'interdistance d'un convoi de véhicules ouvre la voie au développement de correcteurs pouvant être guidés pour atteindre le maintien autonome de la vitesse et l’interdistance désirés pour les véhicules.
Sommaire
Les recherches
La recherche bibliographique montre que les stratégies de commande pour contrôler ces interdistances sont basées soit sur la loi fondamentale de la dynamique pour dériver le modèle dynamique du système de convoi des véhicules, soit sur des algorithmes de la logique floue pour modéliser le système à l’aide des équations mathématiques.
Plusieurs recherches ont été faites pour développer une structure de commande bien adaptée, capable d’améliorer la stabilisation et la performance du système face à des perturbations inattendues agissant sur les véhicules. Shahab Sheikholeslam propose une loi de commande longitudinale pour contrôler automatiquement la vitesse et l’interdistance d’un convoi de véhicules en cas de la perte de communication entre les véhicules de convoi, le résultat obtenu est comparé avec la stratégie de commande qui utilise la communication entre les véhicules de convoi. La performance de la loi de commande longitudinale est dégradée mais cette dégradation n’est pas catastrophique.
Beaucoup de travail a été effectué dans l'étude de la commande longitudinale d'un convoi de véhicules concernant, par exemple, les méthodes exactes pour linéariser et normaliser le modèle dynamique du système. D'un autre côté, Diana Yanakiev traite d'une problématique critique dans le fonctionnement des véhicules automatisés, la présence d’un retard significatif dans les déclencheurs du carburant et du frein. Ceux-ci font dégrader la performance dans la commande longitudinale qui n'utilise pas la communication inter-véhicule, parce que leur effet devient cumulatif pendant qu'il se propage en amont.
Les algorithmes
On a proposé plusieurs algorithmes et technologies pour maintenir les interdistances entre véhicules dans les convois pour les systèmes de transport intelligents. Les stratégies centralisées (commande H∞ par exemple) sont peu attrayantes puisqu’elles demandent un échange important d’informations entre les véhicules. La conception des commandes décentralisées tient peu compte des interactions entre les différents sous-systèmes. Nous recherchons ainsi une solution qui permettra d’établir une structure de commande à la fois efficace et intuitive.
L’objectif principal est de concevoir une stratégie de commande bien adaptée pour contrôler ces interdistances, notamment pour contrôler les distances longitudinale et latérale de chaque véhicule, en se basant sur un algorithme qui implémente une impédance virtuelle (une chaîne de ressorts-amortisseurs) pour imposer les effets d’interaction désirés entre chaque paire de véhicules adjacents.
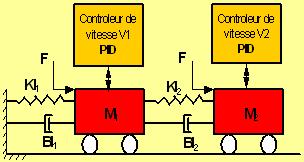
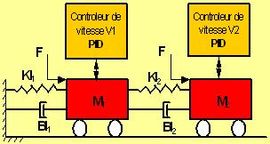 Modèle de convoi de deux véhicules
Modèle de convoi de deux véhicules
Le système est analysé à l’aide d’une approche de modélisation d’un véhicule par une masse en faisant appel à la loi de Newton. Le ressort-amortisseur et F représenteront les forces extérieures exercées sur le véhicule. Les interactions entre les véhicules sont représentées par une série de ressorts-amortisseurs, ainsi la synthèse d’un contrôleur actif PI est possible à partir de l’interprétation des éléments de couplage passifs en se basant sur l’équation qui présente la force ressort-amortisseur.


Cette loi de commande doit prendre en considération les incertitudes de certains paramètres du modèle du système et les perturbations dues aux forces externes qui agissent sur les véhicules, comme les rafales de vent, ainsi que celles engendrées par les variations de la courbure de la route. Afin d’améliorer la stabilité du système de convoi de véhicules, deux structures de commande seront évaluées : la structure maître-esclave et la structure cascade couplée:
- la structure maître esclave, où la vitesse du véhicule en tête de convoi représente la vitesse de consigne pour tous les autres véhicules en arrière;
- la structure cascade couplée utilisant la vitesse du véhicule en avant comme vitesse de consigne pour le véhicule en arrière, ou l'arrière pour l'avant.
G. D. Lee présente une stratégie de contrôle longitudinal pour convoi de véhicules, basé sur un algorithme FSMC (fuzzy-sliding mode control), qui consiste à contrôler les interdistances, la vitesse et l’accélération des véhicules ; le résultat est la garantie de la stabilité du système de convoi dans plusieurs conditions même lorsque chaque véhicule a différentes performances (différents genres ou types de véhicules)[1].
M. Sugeno and M. Murakami ont conçu un contrôleur flou basé sur un modèle flou des actions de la commande d’opérateur humain pour diriger et garer une voiture[2].
Les chercheurs[3] focalisent sur la conception du contrôleur flou du véhicule, en employant le modèle dynamique non linéaire pour traiter des non linéarités des systèmes de commande, en utilisant l’approche de Lyapunov et des techniques convexes d'optimisation basées sur les inégalités linéaires de matrice (LMI).
Bibliographie
- M. Sugeno, M. Nishida, Fuzzy control of model car, in Fuzzy Sets and Systems (FSS), Volume 16, Issue 2, July 1985, pp. 103-113
- Simon Hallé, Brahim Chaib-draa, A collaborative driving system based on multiagent modelling and simulations, Département d’informatique et génie logiciel, université Laval, Sainte-Foy, QC, Canada G1K7P4, Elsevier Ltd, Elsevier Ltd, 2005
- Masayoshi Tomizuka, Mechatronics: from the 20th to 21st century, Department of Mechanical Engineering, University of California at Berkeley, CA94720, USA, received 26 January 2001
Références
- G. D. Lee, S. W. Kim, A longitudinal control system for a platoon of vehicles using a fuzzy-sliding mode algorithm, Electrical and computer engineering division, POSTECH university, Hyoja San-31, Pohang 790-784, South Korea, received 6 April 1999; accepted 29 May 2000 ; available online 4 December 2001.
- M. Sugeno and M. Murakami (1985), An experimental study in fuzzy parking control using a model car, in Industrial applications of fuzzy control, North Holland, pp. 125-138.
- S. Bentalba, A. El hajjaji and A. Rachid, Fuzzy Path Tracking Control of Vehicule, laboratoire des systèmes automatique, université de Picardie-Jules Verne.
Lien interne
Wikimedia Foundation. 2010.