- Transformation galiléenne
-
Transformations de Galilée
Les transformations de Galilée désignent le groupe de transformations qui permet de lier deux systèmes de coordonnées de deux référentiels galiléens, c'est-à-dire en mouvement relatif uniforme en mécanique newtonienne.
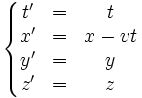
Soient (x, y, z, t) les coordonnées d'un point dans un référentiel A, et (x', y', z', t') les coordonnées de ce point dans le référentiel A'. Si A' est en mouvement uniforme de vitesse v dans la direction x, relativement à A, alors on a :
Ces équations de la transformation sont le cas particulier (et beaucoup plus simple) des transformations de Lorentz où le paramètre c, la vitesse de la lumière, serait infinie. On sait que ce n'est pas le cas, mais elles restent suffisamment bonnes (et, par conséquent, la mécanique newtonienne reste valable) tant que la vitesse relative des référentiels est assez petite par rapport à la vitesse de la lumière. Sinon, il faut revenir au groupe des transformations de Lorentz et adopter la relativité restreinte.
Voir aussi
 Portail de la physique
Portail de la physique
Catégories : Méthode mathématique de la physique | Mécanique classique | Groupe
Wikimedia Foundation. 2010.