- Servo
-
Servomoteur
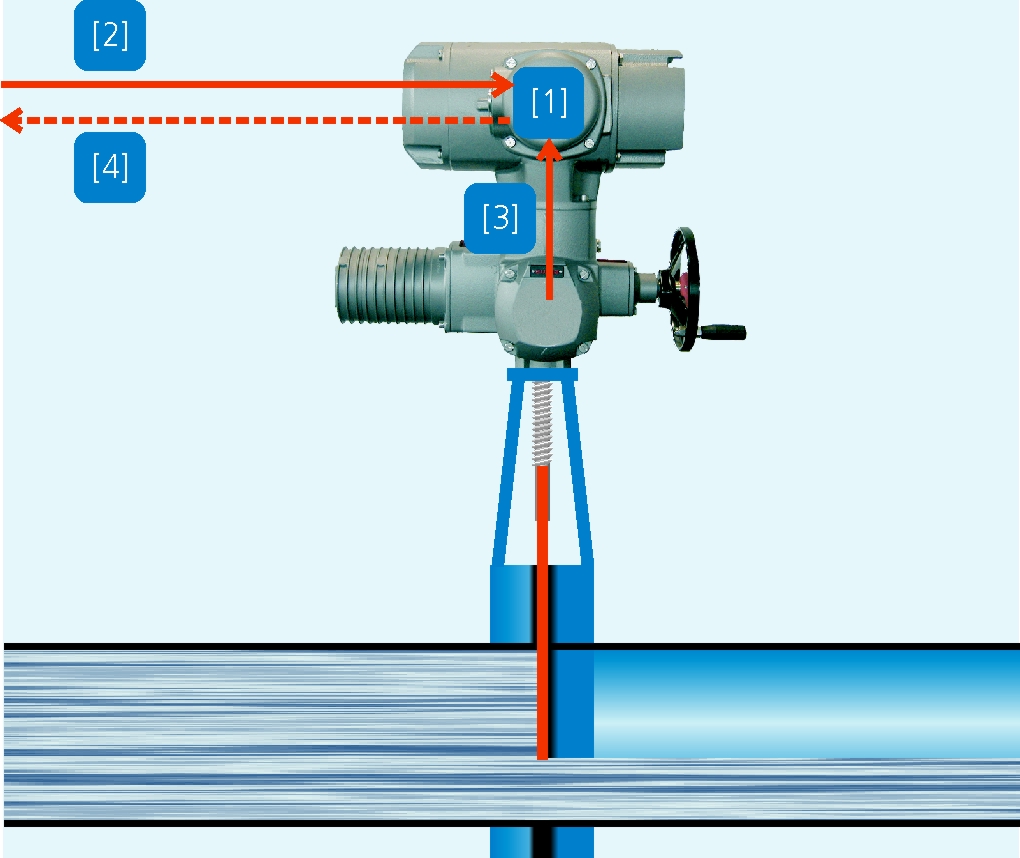
 Servomoteur électrique monté sur une vanne dans une centrale électrique
Servomoteur électrique monté sur une vanne dans une centrale électrique
Un servomoteur (ou servo-moteur) est un moteur conçu pour produire le mouvement précis d'un élément mécanique selon une commande externe.
Un servomoteur est un système motorisé capable d'atteindre des positions prédéterminées, puis de les maintenir. La position est : dans le cas d’un moteur rotatif, une position d'angle et, dans le cas d’un moteur linéaire une position de distance. On utilise des moteurs électriques aussi bien que des moteurs hydrauliques. Le démarrage et la conservation de la position prédéterminée sont commandés par un système de réglage.
Pour un ajustement précis de la position, le moteur et son réglage sont équipés d'un système de mesure qui détermine la position courante (p. ex. l'angle de rotation parcouru relatif à une position de départ) du moteur. Cette mesure est effectuée sur un réglage rotatif, p. ex. un resolveur, un réglage incrémental ou un réglage absolu (réalisable p. ex. par un potentiomètre).
Le système de réglage souvent électronique compare le signal à une valeur prescrite de la position de consigne. S’il y a une déviation, le moteur est commandé dans la direction qui garantit le plus petit chemin à effectuer pour arriver à la valeur de consigne. Cela a pour conséquence de faire diminuer l'écart. La procédure se répète aussi longtemps et, jusqu'à ce que la valeur courante se trouve incrémentiellement ou par l'intermédiaire d’une approximation dans les seuils de tolérance de la valeur consigne. Alternativement, la position du moteur peut être saisie aussi numériquement et comparée via un ordinateur approprié à une valeur prescrite.
Dans une certaine mesure, ces moteurs peuvent être remplacés par des moteurs pas-à-pas qui occasionnent moins de dépenses. Mais les moteurs pas-à-pas peuvent toutefois, dans certaines conditions, commettre des erreurs de mise en position (sauter des pas). De plus, les servomoteurs - généralement avec boîte de vitesses - peuvent délivrer des couples plus élevés et être actionnés avec des vitesses de rotation plus importantes, ce qui est favorable lors des applications dynamiques qui exigent particulièrement une sécurité de travail élevée ou des temps d'ajustage rapides.
Un moteur électrique à courant alternatif ou continu est jumelé à un train d'engrenages démultipliant qui entraîne un axe avec une grande force de torsion. Généralement, la rotation de cet axe est restreinte à seulement 180 degrés par un mécanisme interne. Des composants électroniques détectent la position réelle de l'axe et contrôlent la rotation du moteur électrique tant que la position de l'axe ne se conforme pas à celle requise par la commande externe.
Il existe une vaste gamme de servomoteurs : des gros modèles industriels de plusieurs kilogrammes à courant alternatif, avec des boîtiers et carters d'engrenages en métal, jusqu'aux minuscules servomoteurs en plastique de quelques grammes à courant continu que l'on retrouve en modélisme dans les avions, les bateaux, les voitures et les hélicoptères modèles réduits.
Sommaire
Utilisation
Selon leur alimentation en énergie, les servomoteurs se divisent par groupes: pneumatiques, hydrauliques et électriques.
La description proposée ci-dessous détaille principalement les servomoteurs électriques utilisés pour la manœuvre des vannes industrielles. La gamme d'utilisation s'étend des applications dans des stations d'épuration jusqu'aux raffineries en passant par les centrales électriques et bien d'autres domaines. Ils sont utilisés essentiellement dans les processus automatisés. Ces vannes sont de construction et de dimensions diverses. Leurs diamètres vont de quelques centimètres à plusieurs mètres.
Division des servomoteurs selon leur mouvement
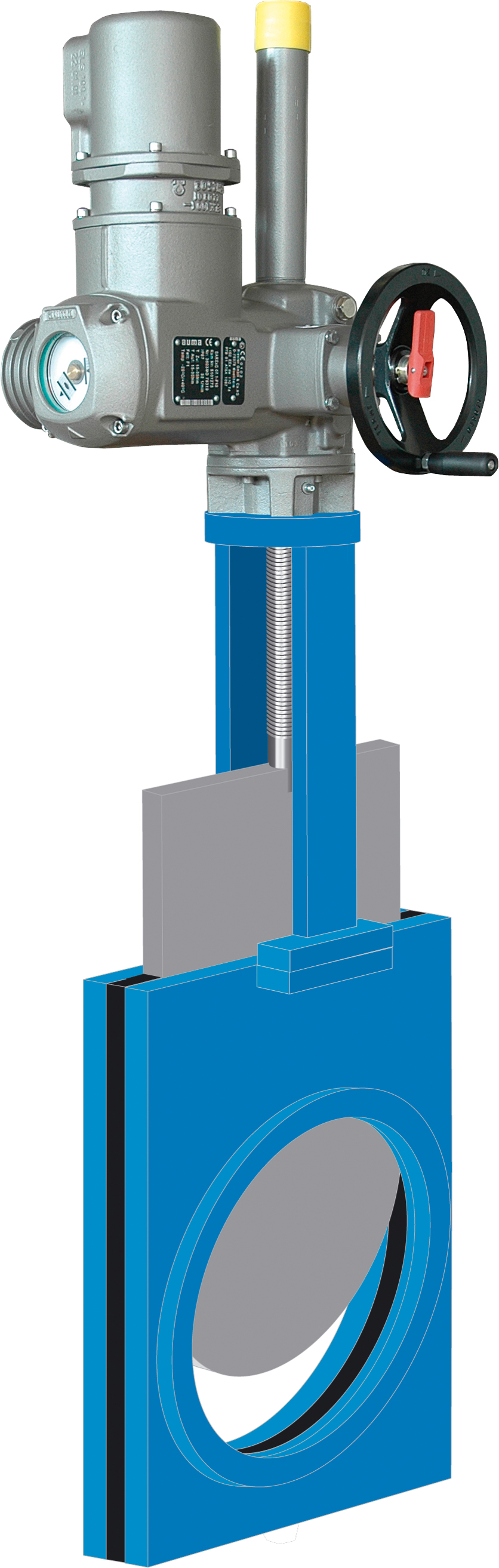
 Servomoteur électrique monté sur un tablier d'un robinet-vanne
Servomoteur électrique monté sur un tablier d'un robinet-vanneLa course est la distance parcourue par l'obturateur pour effectuer une pleine ouverture ou fermeture de la vanne. Des robinets papillon, des robinets à soupape et des robinets-vannes sont des obturateurs typiques. Ils requièrent des mouvements différents, ce qui conditionne le type de servomoteur. Le papillon est manœuvré avec un mouvement fraction de tour de 90°. Le cylindre des robinets à soupapes effectue un mouvement de course relativement limité, tandis que la manœuvre des tabliers parcourt le diamètre complet de la vanne.
Servomoteurs multitours
Les servomoteurs multitours servent à l'automatisation de vannes multitours. Le représentant classique est le tablier. La norme EN ISO 5210 décrit les exigences de base aux servomoteurs multitours :
" Un servomoteur multitours est un servomoteur qui transmet un couple à une vanne durant au moins une manœuvre complète. Il est capable de supporter la poussée. "
Une tige filetée est montée au tablier. A l'aide d'un écrou de tige, le servomoteur visse le tablier dans sa rainure, de la position OUVERTE à la position FERMÉE et vice versa. La course complète peut être atteinte pour un nombre de tours allant de un à plusieurs centaines. Par leur conception, les servomoteurs électriques ne sont pas soumis à des restrictions de course, contrairement aux servomoteurs pneumatiques. Pour cette raison, les tabliers sont presque exclusivement automatisés à l'aide de servomoteurs électriques. Le servomoteur multitours doit pouvoir supporter le poids du papillon-vanne (deuxième phrase de la norme).
Les tabliers peuvent avoir un diamètre d'environ 10 cm à plusieurs mètres. Le couple requis pour les applications en servomoteurs multitours varie entre 10 Nm et 30 KNm environ.
Servomoteurs fraction de tour
 Servomoteur électrique "fraction de tour" monté sur une vanne papillon
Servomoteur électrique "fraction de tour" monté sur une vanne papillonCes servomoteurs servent à automatiser des vannes fraction de tour. Des représentants classiques de ce type de vanne sont des robinets papillon et des robinets à tournant sphérique. Les exigences de base aux servomoteurs fraction de tour sont décrits dans la norme EN ISO 5211 comme suit :
" Un servomoteur fraction de tour est un servomoteur qui transmet un couple à une vanne durant moins d'une manœuvre complète. Il ne doit pas supporter la poussée. "
Moins d'une manœuvre complète signifie en règle générale un mouvement rotatif de 90°. Toutefois, il y a des types de vannes nécessitant des angles de rotation différents, par exemple des robinets à deux passages. Les obturateurs des vannes fraction de tour sont toujours à l'intérieur du logement de la vanne. Le poids de l'obturateur est supporté par le corps de la vanne.
Les vannes fraction de tour peuvent avoir un diamètre de quelques centimètres à plusieurs mètres. La plage du couple pour manœuvrer l'obturateur s'élève de 10 Nm à plusieurs 100 KNm. Les servomoteurs électriques sont sans concurrence pour les vannes à grands diamètres et à une demande élevée de couple.
Servomoteurs à déplacement linéaire
Actuellement, il n'y a pas de normes internationales décrivant les servomoteurs à déplacement linéaire. Typiquement, ce type de servomoteur équipe des vannes de réglage. tout comme le bouchon d'une baignoire, un cône est pressé dans son siège par un déplacement perpendiculairement au sens de l'écoulement. Le milieu exerçant une pression contre le cône, le servomoteur à déplacement linéaire doit générer la poussée suffisante pour vaincre cette pression et le maintenir en position.
Les servomoteurs à déplacement linéaire utilisés pour cette application sont généralement des servomoteurs à membrane, utilisant de l'air comprimé. Ils sont caractérisés par leur principe de construction relativement simplifié et par conséquent peu coûteux.
Conception
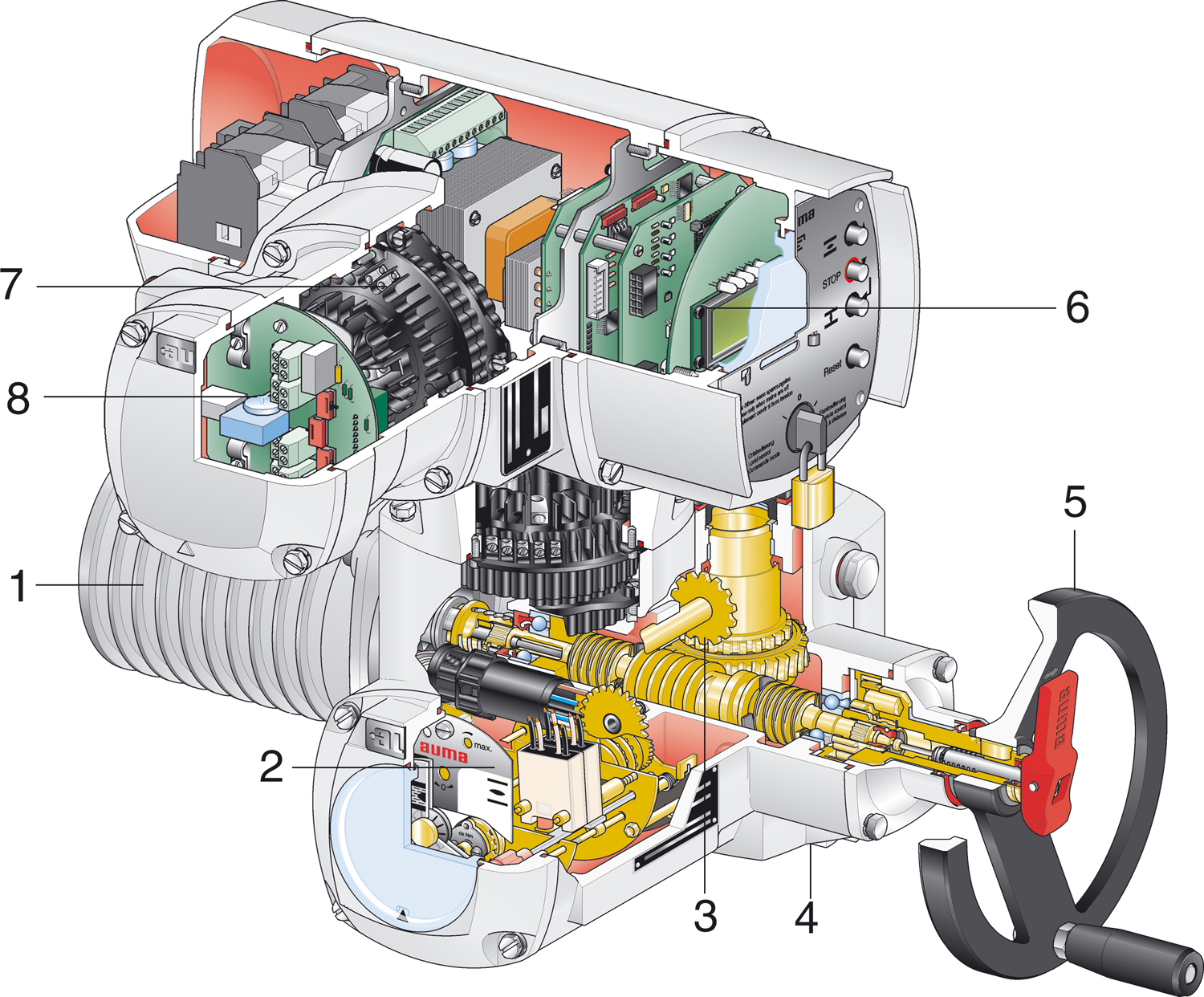
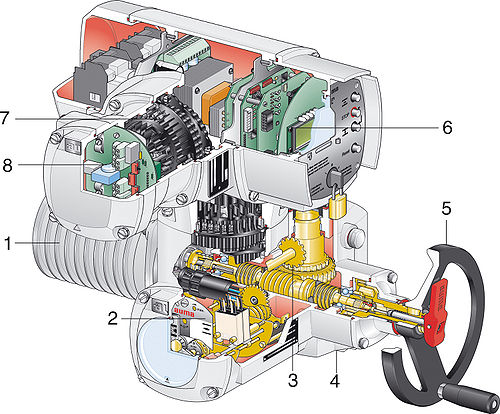 Servomoteur multitours électrique avec commande
Servomoteur multitours électrique avec commandeMoteur (1)
Quasiment tous les types de moteurs électriques sont utilisés. Moteur à courant continu ou alternatifs, monophasés ou triphasés. La préférence va toutefois aux moteurs asynchrones à courant alternatif triphasés mais également au moteur à courant alternatif monophasé. Leur robustesse et leur fort couple au démarrage sont deux qualités appréciées dans ce domaine, notamment quand il faut sortir une vanne bloquée dans son siège.
Les servomoteurs électriques sont employés dans des conditions ambiantes extrêmes. Les moteurs à ventilateurs ne remplissent pas les exigences en type de protection et ne sont que peu utilisés. De fait, les moteurs requièrent une phase de refroidissement après service. Les servomoteurs ne sont pas conçus pour un fonctionnement en continu. Ceci correspond parfaitement à l'application car les vannes ne sont pas non plus manœuvrées en permanence.Technologie sensorielle de course et de couple (2)
Les contacts de fin de course servent à mesurer la distance parcourue et à signaler lorsque la position finale est atteinte. Un limiteur de couple enregistre l'effort sur la vanne. Un dépassement d'une valeur de limite est également signalée. Les servomoteurs disposent fréquemment d'un codeur de position absolu (numérique ou analogique).
Réducteur (3)
Les réducteurs employés sont régulièrement des réducteurs à roue et vis sans fin. La réduction est souvent importante. Les vitesses de manœuvre des vannes sont relativement faibles. Malgré le rendement médiocre de ce type de transmission, la caractéristique d'irréversibilité la rend particulièrement bien adaptée aux servomoteurs. Ce type de réducteur permet de maintenir le couple sans alimentation du moteur, et, sur les servomoteurs multitours, a soutenir la charge due au poids du tablier.
Fixation de la vanne (4)
Le raccordement à la vanne est réalisé par deux éléments. Le premier élément appelé l'embase du servomoteur est solidement vissé à la bride de montage de la vanne. La taille de cette bride augmente avec la valeur du couple à transmettre.
Le deuxième élément est l'accouplement, utilisé pour transmettre le couple ou la poussée du servomoteur à l'arbre de la vanne. Vu le grand nombre de types de construction des vannes, il y a également une multitude de types d'accouplements.
Pour les servomoteurs multitours et fraction de tour, les dimensions et la forme de la bride de fixation ainsi que les formes d'accouplements sont définies par les normes EN ISO 5210 ou EN ISO 5211. En règle générale, la norme DIN 3358 s'applique pour les servomoteurs à déplacement linéaire.
Commande manuelle (5)
La plupart des servomoteurs électriques sont équipés d'un volant permettant de le manœuvrer manuellement (lors de la mise en service ou lors d'une panne de courant par exemple). Le volant ne tourne pas pendant le fonctionnement du moteur.
Commande de servomoteur (6)
La commande de servomoteur assure d'une part le traitement des signaux du servomoteur et d'autre part le traitement des commandes de manœuvre du système de contrôle. Cette tâche peut être effectuée par une commande externe, par exemple, un API (Automate Programmable Industriel). Les servomoteurs modernes sont équipés d'une commande intégrée assurant le traitement des signaux sur place et sans délais. La commande électrique des moteurs peut être réalisée par des contacteurs ou par des composants électroniques statiques (transistor IGBT, thyristor, GTO etc.)
Raccordement électrique (7)
Les câbles d'alimentation du moteur et les câbles de signal sont connectés au bornier électrique du servomoteur pour transmettre les ordres de commandes à celui-ci, et pour retransmettre la position du servomoteur au système de contrôle commande. Idéalement le raccordement électrique doit être réalisé par un monoconnecteur afin d'éviter tout décâblage lors de la maintenance.
Connexion bus de terrain (8)
Dans le secteur de l'automatisation de procédé, la technologie bus de terrain s'impose de plus en plus pour la transmission des données. Pour cette raison, les servomoteurs électriques sont disponibles avec toutes les interfaces de bus de terrain conventionnellement utilisées dans l'automatisation de procédé. Une technologie de connexion particulière peut être requise selon le bus utilisé.
Fonctions
Arrêt automatique dans les positions finales
Après la réception d'une commande de manœuvre, le servomoteur pilote la vanne en direction d'OUVERTURE ou FERMETURE. Deux types d'arrêts fondamentalement différents sont possibles. Le premier, appelé arrêt sur fin de course, est uniquement fonction de la position. La commande éteint le servomoteur dès le point de coupure atteint. Il existe toutefois des types de vannes nécessitant une manœuvre de l'obturateur à une force ou à un couple défini pour assurer l'étanchéité de la vanne sur son siège. Cette coupure est appelée arrêt sur limiteur de couple. La commande est programmée de manière à couper le servomoteur lorsque le seuil de couple a été excédé. Un capteur de fin de course permet de signaler la position de la vanne.
Fonctions de sauvegarde
La mesure du couple n'est pas uniquement utilisée pour signaler l'arrêt en position finale. Il sert également à détecter une anomalie pendant la manœuvre, comme celle due à la présence d'un objet piégé par exemple. Cette limitation permet d'éviter une casse mécanique. La commande est en mesure de distinguer l'arrêt normal de l'arrêt exceptionnel en position intermédiaire par l'état du capteur de fin de course.
Des sondes de températures servent à protéger le moteur contre la surchauffe. Certains fabricants mesurent l'accroissement de la tension du moteur. Toutefois, la surveillance par thermocontacts et sondes PTC, intégrés dans le moteur, s'est révélée être la méthode la plus fiable. Ces dispositifs se déclenchent lorsque la température de seuil a été dépassée et coupent le moteur avant destruction.
 Une valeur de consigne [2] et une valeur réelle [3] sont indiquées au positionneur [1]. Le moteur est piloté jusqu'à ce que la valeur réelle soit égale à la valeur de consigne. Généralement, le système de contrôle requiert une recopie de position [4]
Une valeur de consigne [2] et une valeur réelle [3] sont indiquées au positionneur [1]. Le moteur est piloté jusqu'à ce que la valeur réelle soit égale à la valeur de consigne. Généralement, le système de contrôle requiert une recopie de position [4]Fonctions techniques de procédé
La tendance à la décentralisation des systèmes automatisés et l'introduction de microprocesseurs ont favorisé la décentralisation des systèmes de contrôle. Jadis, actionneurs et systèmes de contrôles étaient séparés. Cette mutation a permis de réduire la quantité de données à transmettre. L'utilisation relativement récente des bus de terrain a fait avancer cette tendance. Cette caractéristique concerne également les servomoteurs électriques dont le nombre de fonctions a considérablement augmenté.
Un exemple très simple peut être pris avec le positionnement. Des positionneurs modernes disposent d'une auto-adaptation, c'est-à-dire que le comportement de régulation est surveillé et que les paramètres de régulation sont optimisés en permanence.
Les servomoteurs électriques sont disponibles avec des contrôleurs de procédés (contrôleurs PID) performant, tout particulièrement pour des installations éloignées. Par exemple, la régulation du débit vers un réservoir surélevé : le servomoteur peut assurer les tâches qui devraient l'être par une API, ce qui évite une installation de matériel supplémentaire.
Diagnostic
Le diagnostic comprend deux aspects. Les servomoteurs modernes disposent de fonctions de diagnostic détaillé permettant d'identifier et de remédier à de multiples défaillances. Ils peuvent également tenir un historique des données de service. La consultation des enregistrements permet de connaître l'évolution du service fonctionnel. À partir de cette base il devient possible d'optimiser l'utilisation et de réduire l'usure du système en intervenant sur certains paramètres.
Modes de service
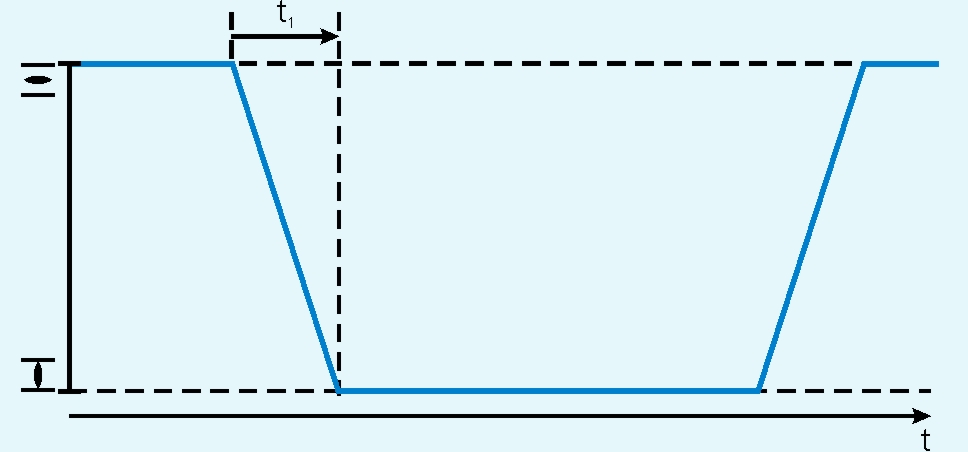
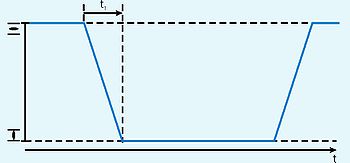 Déroulement typique en service tout ou rien. t1 est le temps de manœuvre ne devant pas excéder le temps de marche maxi. admissible.
Déroulement typique en service tout ou rien. t1 est le temps de manœuvre ne devant pas excéder le temps de marche maxi. admissible. Déroulement typique en service de régulation.
Déroulement typique en service de régulation.Service tout ou rien
Si les vannes sont utilisées en tant qu'obturateur, leur fonctionnement est binaire : ouverte ou fermée. Les positions intermédiaires ne sont pas approchées. La vanne sera relativement peu souvent actionnée, l'intervalle entre deux opérations pouvant être de quelques minutes ou de plusieurs mois. Dans ce cas, le mode de service du moteur électrique selon la norme IEC 34-1 est intitulé « service intermittent S2 ». Ce mode de service est caractérisé en outre par l'indication d'un temps de marche maximum admissible sans interruption. Normalement, ce temps de marche s'élève á 15 minutes.
Service de positionnement
Des positions intermédiaires prédéfinies sont approchées pour régler un débit statique le long d'une tuyauterie. Les limitation de marches sont les mêmes que pour le service tout et rien.
Service de régulation
Les applications de régulation doivent prendre en compte l'inertie de l'obturateur, les fluctuations des entrées du système, etc. Par exemple, le réglage précis d'un débit de fluide. Lors de certaines applications sensibles, le réglage est repris à un intervalle de quelques secondes. Cette exigence sur le servomoteur est plus importante que lors du service tout ou rien. La mécanique comme le moteur doivent être dimensionnés de manière à résister à des démarrages fréquents sur de longues périodes et ce sans nuire à la précision souhaitée.
Le mode de service des moteurs électriques pour ces conditions d'application est appelé « service discontinu S4 » ou « service discontinu S5 ». La limitation du temps de marche est donnée relativement au temps de fonctionnement nominal du système. Pour les servomoteurs en service de régulation, la limitation est égale à 125 % du temps normal.
 Les servomoteurs sont utilisés dans des conditions sévères en Sibérie...
Les servomoteurs sont utilisés dans des conditions sévères en Sibérie... ...et dans des non moindres au Sahara
...et dans des non moindres au SaharaConditions de service
Les servomoteurs électriques sont utilisés partout dans le monde, dans toutes les zones climatiques, dans des implantations industrielles de tout type, sous des conditions ambiantes locales parfois extrêmes. Les applications sont souvent soumises à des exigences de sécurité de grande importance. Aussi, la fiabilité du matériel doit satisfaire aux demandes des entités exploitantes. La défaillance d'un servomoteur peut mener à des accidents dans des systèmes de techniques de procédé ou à la fuite de substances toxiques.
Fréquemment, les systèmes techniques de procédé fonctionnent sur plusieurs décennies ce qui entraîne des exigences particulières sur la durée de vie des appareils. Pour cette raison, les servomoteurs électriques sont réalisés avec des indices de protection élevés. La protection anti-corrosion, par exemple, est un élément de plus haute importance pour les fabricants.
Types de protection
Les types de protection des servomoteurs sont définis selon les codes IP (Indices de Protection) de la norme EN 60529. La plupart des servomoteurs électriques sont réalisés dans leur version de base selon l'indice de protection IP 67. Ceci signifie qu'ils sont imperméables aux poussières et à l'eau et protégés contre les effets de l'immersion à durée déterminée (30 minutes pour une hauteur de colonne d'eau de 1 m, soit 1 bar). La plupart des fournisseurs offrent leurs appareils en indice de protection IP 68. Ce degré protège le servomoteur contre les effets d'une immersion prolongée, en règle générale jusqu'à une pression de 6 bars.
Températures ambiantes
En Sibérie, les températures peuvent baisser jusqu'à -60 °C. Dans certains procédés, la température dépasse parfois le seuil des +100 °C. Un point décisif pour le bon fonctionnement des servomoteurs dans ces conditions est l'utilisation d'un lubrifiant approprié. Les lubrifiants ordinaires soumis à des sollicitations thermiques sévères peuvent devenir trop solides à basses températures. Le servomoteur peut être bloqué par cette résistance mécanique supplémentaire. Inversement, les graisses deviennent liquides à température élevée et perdent rapidement leur qualité lubrifiante. Lors de la conception du servomoteur, la température d'utilisation et la sélection du lubrifiant jouent un rôle important.
Protection antidéflagrante
Les servomoteurs électriques sont utilisés dans des installations industrielles à atmosphères explosibles. Ceci comprend les raffineries, les pipelines, les industries pétrolières et gazières ou encore les mines. En présence d'un mélange explosif de gaz-air ou de gaz-poussière dans une installation, le servomoteur ne doit pas agir en tant que source d'inflammation. Il faut éviter en particulier l'échauffement des surfaces des appareils afin d'empêcher que les appareils émettent des étincelles inflammables. Ceci peut être réalisé par une enveloppe antidéflagrante, par exemple. L'enveloppe admet une explosion interne sans déformation permanente dans l'enceinte de l'appareil, et ne la transmet pas à l'atmosphère environnante. La construction du carter doit être suffisamment robuste pour résister à la pression d'une éventuelle explosion interne sans détérioration.
Les servomoteurs destinés à cette utilisation particulière doivent être qualifiés en tant qu'appareils antidéflagrants par des organismes notifiés. Sur le plan mondial, plusieurs systèmes de qualification cohabitent, sans standard commun. Selon le pays d'exploitation, des systèmes de qualification différents sont à respecter par le fabricant. En Europe, les appareils antidéflagrants doivent répondre à la Directive ATEX 94/9/CE, aux États-Unis c'est la NEC par FM, ou encore la CEC par la CSA au Canada. Les appareils antidéflagrants doivent satisfaire aux caractéristiques constructives définies dans ces directives.
Modélisme
Généralités
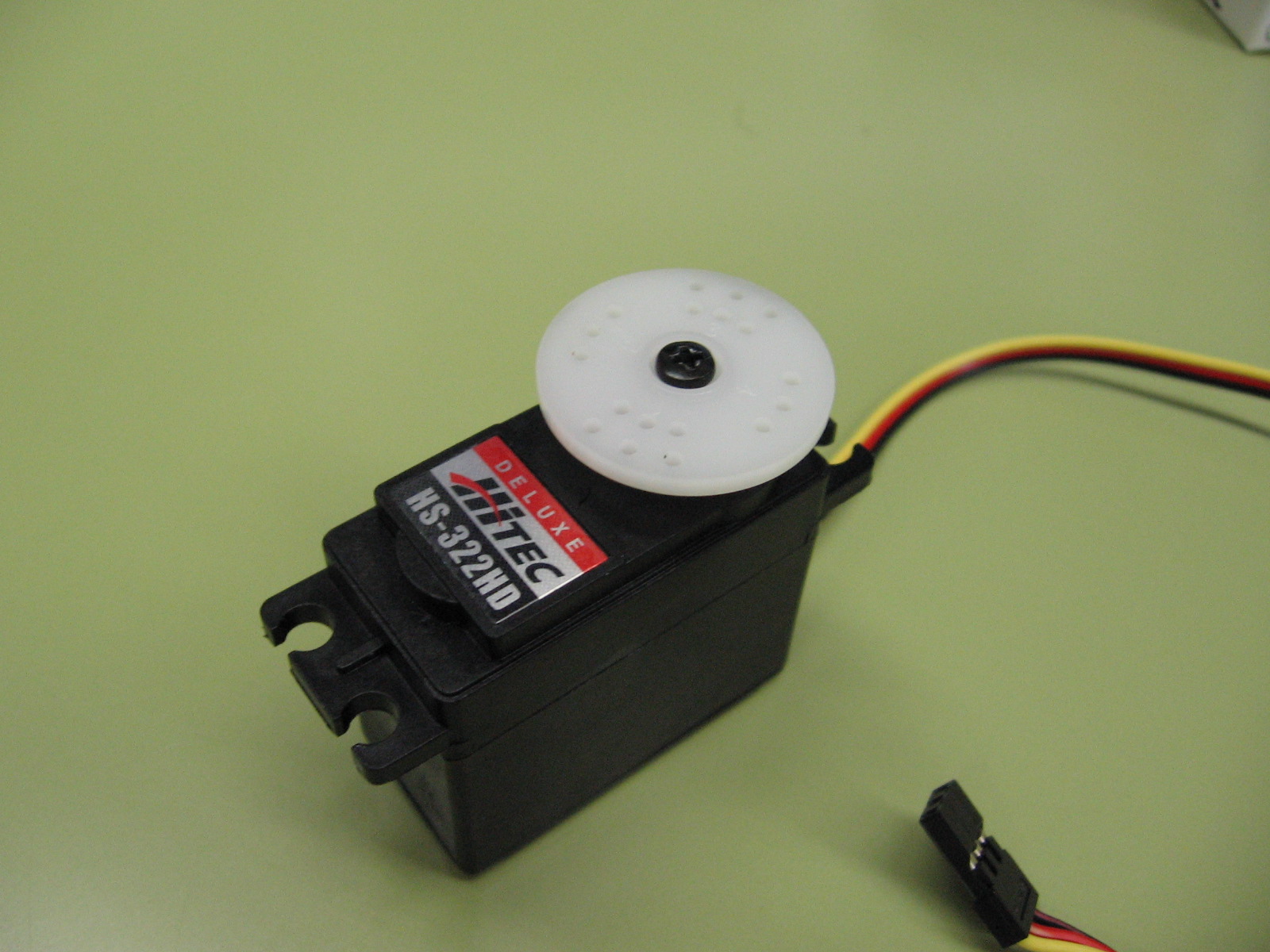
 Un servomoteur d'aéromodélisme
Un servomoteur d'aéromodélismeEn modélisme, un servomoteur est souvent appelé servo. C’est un ensemble mécanique et électronique comprenant :
- un moteur à courant continu de très petite taille ;
- un réducteur en sortie de ce moteur diminuant la vitesse mais augmentant le couple ;
- un potentiomètre (faisant fonction de diviseur résistif) qui génère une tension variable proportionnelle à l'angle de l'axe de sortie.
- un dispositif électronique d'asservissement ;
- un axe dépassant hors du boîtier avec différents bras ou roues de fixation.
Les servos servent à actionner les parties mobiles du modèle : ailerons, volets et trains pour les avions, contrôle de direction dans le cas de modélisme automobile... À cette fin, les moteurs sont asservis et obéissant à une commande externe, généralement transmise par radio.
Fonctionnement
Les servos sont commandés par l'intermédiaire d'un câble électrique à trois fils qui permettent d’alimenter le moteur et de lui transmettre des ordres de positions sous forme d’un signal codé en largeur d'impulsion. Celà signifie que c'est la durée des impulsions qui détermine l'angle absolu de l'axe de sortie et donc la position du bras de commande du servo. Le signal est répété périodiquement, en général toutes les 20 ms, ce qui permet à l'électronique de contrôle de corriger continuellement la position angulaire de l'axe de sortie, cette dernière étant mesurée par le potentiomètre.
Lorsque le moteur tourne, l'axe du servo change de position, ce qui modifie la résistance du potentiomètre. Le rôle de l'électronique est de commander le moteur pour que la position de l'axe de sortie soit conforme à la consigne reçue : c'est un asservissement.
Variété
Les servos ont des types très variés pour des applications multiples.
Les plus courants, et les moins chers, ont une course limitée à 90° ou 120°. Un servo standard comme le S3002 de Futaba a des dimensions de 31,0 x 16,0 x 30,2 mm et pèse 35 g. Sa vitesse de rotation est de 0,20 seconde pour parcourir 60° alors que son couple est de 3,3 kg.cm.
Un mini servo comme le HS-55 de chez Hitec est quatre fois moins lourd, mais aussi moins puissant. En effet, son couple est de 1,1 kg.cm et sa vitesse est de 0,17 seconde pour 60°. Mais son poids est de 8g pour des dimensions de 22,8 x 11,6 x 24 mm.
Ils se distinguent également par:
- la matière utilisée pour la réalisation des pignons, nylon, métal...
- le montage éventuel sur roulements...
- etc.
Il existe aussi des servos treuils capables de faire plusieurs tours, des servomoteurs analogiques dont la commande est très différente de ceux qui sont décrits ci-dessus.
 Portail de la robotique
Portail de la robotique Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique Portail de l’aéromodélisme
Portail de l’aéromodélisme
Catégories : Dispositif électromécanique | Moteur






Wikimedia Foundation. 2010.