- SRMS
-
Shuttle Remote Manipulator System
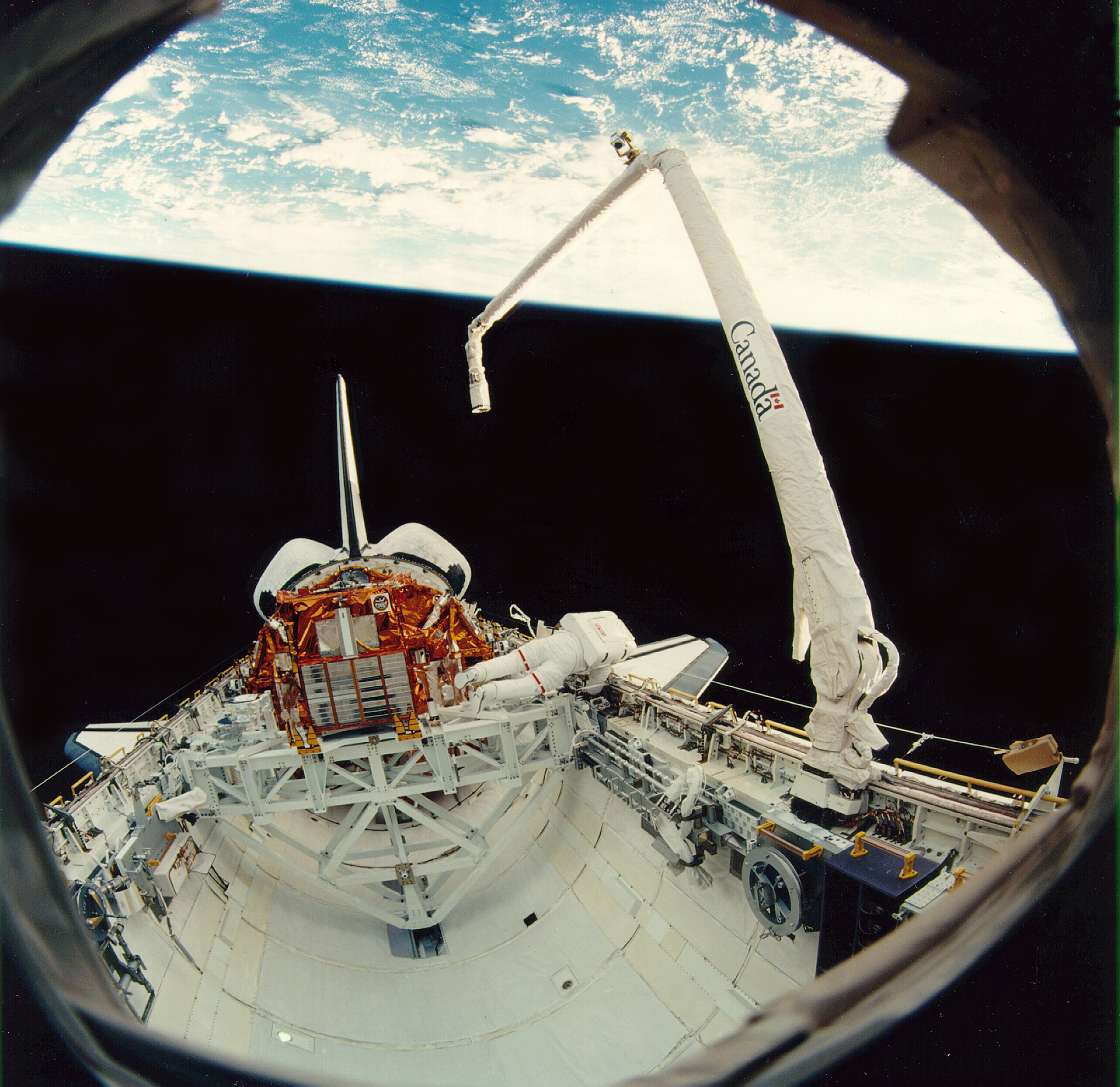
 Vue sur la baie de stockage de la navette spatiale avec à droite le Canadarm déployé
Vue sur la baie de stockage de la navette spatiale avec à droite le Canadarm déployé
Shuttle Remote Manipulator System (SRMS) ou Canadarm (qui vient du fait qu'il a été conçu au Canada) est le nom du bras robotique de la navette spatiale américaine.
Il sert essentiellement à manipuler des charges utiles pour les extraire de la baie de stockage et les déployer, ou inversement. Il peut également servir de support pour les astronautes lorsqu'ils effectuent des sorties extravéhiculaires ou bien permettre l'inspection de certaines parties de la navette qui sont inaccessibles à l'équipage. Ce dernier point est essentiel depuis l'accident de la Navette spatiale Columbia en 2003 dû à un impact sur le bouclier thermique. Ainsi, depuis la reprise des vols en juillet 2005, toutes les missions prévoient une inspection du bouclier thermique.
Sommaire
Histoire
C'est suite au développement par la société DSMA Atcon d'un robot chargeant le combustible nucléaire au coeur des réacteurs que la NASA a été attiré par l'expertise canadienne dans la mise au point de robot. Un groupe d'industriels est formé et une proposition est communiquée à la NASA suite à son désir de disposer d'un bras robotique à bord de la navette spatiale alors en pleine conception.
Le projet est officiellement lancé en 1974. Sous la supervision du Conseil national de recherches Canada (CNRC), un groupe d'entreprises composées de DSMA Atcon mais également de SPAR Aerospace et CAE Electronics débute la conception du Canadarm. L'année suivante Spar Aerospace est retenu comme sous-traitant principal du CNRC.
Livré à la NASA en avril 1981, le Canadarm a été utilisé pour la première fois dès la seconde mission de la navette spatiale Columbia (STS-2) qui a décollé le 13 novembre 1981. Quatre autres bras ont par la suite été commandés par la NASA et livrés respectivement en janvier 1983, décembre 1983, mars 1985 et août 1993. Toutes les navettes spatiales ont utilisé à un moment ou un autre le Canadarm [1].
Depuis sa première mise en service en 1981, le Canadarm a été l'objet de plusieurs modifications, permettant notamment d'avoir un contrôle plus précis du bras dans certaines conditions comme à basse vitesse [2].
Le Système mobile de service, le bras manipulateur de la Station spatiale internationale (ISS), est également conçu au Canada par les mêmes entreprises que le SRMS. Pour cette raison le bras manipulateur de l'ISS est surnommé Canadarm2 et le SRMS Canadarm1.
Description
Le Canadarm est une partie du Payload Deployment and Retrieval System (PDRS) ou en français le "système de déploiement et de récupération des charges utiles" de la navette spatiale. En plus bras du robotique, le PDRS comprend la cabine de contrôle située à l'arrière du poste de pilotage, le circuit de télévision en circuit fermé permettant de contrôler les mouvements du Canadarm et de divers dispositif d'attaches du Canadarm et de la charge utile.
Canadarm
Le Canadarm fait 15,32 m de long et est divisé en trois segments plus ou moins calqués sur le bras humain [3]:
- segment supérieur du bras, long de 6,38 m
- segment inférieur du bras, long de 7,06 m
- le poignet et l'effecteur qui est la main du Canadarm, long de 1,88 m
Chaque segment est relié entre eux par un système d'engrenage leur permettant d'effectuer de un à trois mouvements. La partie fixée à la navette, l'épaule, dispose de deux degrés de liberté : le tangage et le lacet. L'épaule se prolonge par le segment supérieur ou un nouvel engrenage, le coude, permet au segment supérieur et inférieur d'effectuer un seul mouvement, le tangage. A l'extrémité du segment inférieur se trouve le poignet qui peut réaliser les trois mouvements possibles, le tangage, le lacet et le roulis.
 L'effecteur, la "main" du Canadarm
L'effecteur, la "main" du CanadarmÀ l'extrémité du poignet se trouve l'effecteur, qui est la "main" du bras robotique, permet de saisir les charges à manipuler. Il se présente sous la forme d'un cylindre creux de 34,5 cm de diamètre pour 54,5 cm de long et principalement composé d'aluminium [3]. Le système de fixation est composé de trois câbles qui se resserrent autour d'une poignée devant se trouver sur la charge utile, utilisant ainsi le principe du collet [4] [5]. Une fois la charge utile capturée, il est nécessaire de la ternir fermement pour ne plus qu'elle bouge par rapport au Canadarm. Cette rigidification de la capture est assurée par un mécanisme qui rétracte les trois câbles vers l'intérieur de l'effecteur. En plus du mécanisme de fixation, l'effecteur dispose d'un connecteur spécial (SPEE pour Special Purpose End Effector) fournissant une alimentation électrique et permettant d'envoyer jusqu'à seize commandes différentes à la charge utile si nécessaire [3].
Un effecteur spécifique à une charge utile, conçu par le fabricant de cette dernière, peut également remplacer l'effecteur standard [6].
Le bras pèse 410 kilogrammes et le système au complet 450 kilogrammes [7]. Bien qu'il soit capable de déplacer des charges pesant 266 tonnes en microgravité, il est incapable de déplacer son propre poids lorsqu'il est sur Terre [8]. Pour réaliser les tests et les entraînements des astronautes, une salle spéciale ainsi qu'un simulateur informatique ont été développés [8]. En charge, sa vitesse de déplacement est de six centimètres par seconde alors que libre, il va dix fois plus vite [7].
Les segments sont constitués de plusieurs couches de graphite/époxy (jusqu'à seize pour le segment supérieur) et recouverts d'un revêtement en kevlar pour protéger le Canadarm d'éventuel coup qu'il pourrait recevoir. A cela s'ajoute un revêtement isotherme qui lui donne sa couleur blanche. Ce revêtement protège aussi le Canadarm des hautes températures lorsqu'il est exposé au rayon du Soleil, qu'aux basses températures qui règnent dans l'espace lorsqu'il est à l'ombre [7] et lui permet ainsi de rester entre des températures oscillant entre -20 °C et 70 °C [9].
La navette spatiale a été conçue de manière à pouvoir recevoir deux Canadarm, qui seraient fixés de chaque côté de la baie de stockage. Mais cette configuration n'a jamais été utilisée car le côté droit est occupé par l'antenne de la bande Ku. De plus, un seul bras pourrait être utilisé à la fois, les commandes de contrôle à l'arrière du pont de vol étant conçues pour ne pouvoir contrôler qu'un seul bras à la fois [6].
Commandes
 Les commandes du Canadarm avec au dessus des commandes les deux hublots donnant sur la baie de stockage et deux autres hublots tout en haut de l'image donnant sur le dessus de la navette
Les commandes du Canadarm avec au dessus des commandes les deux hublots donnant sur la baie de stockage et deux autres hublots tout en haut de l'image donnant sur le dessus de la navetteLes commandes de contrôle du Canadarm se trouve à l'arrière du pont de vol (en anglais aft flight deck), derrière le poste de pilotage et donnent sur la baie de stockage de la navette spatiale. Quatre hublots permettent d'observer les mouvements du bras manipulateurs, deux donnent sur la baie de stockage et deux autres sur le dessus de la navette. Les mouvements du Canadarm sont contrôlés par l'opérateur à la fois à travers ces hublots, mais aussi à l'aide de diverses caméras disposées sur le SRMS. A ce titre, généralement deux astronautes assurent les mouvements du Canadarm, un qui manipule les commandes et un autre qui surveille les images fournies par les caméras [10].
Il existe deux modes de fonctionnement [7] :
- un mode semi-automatique ou les mouvements réalisés sont en parties calculés par l'ordinateur du Canadarm
- un mode manuel ou tous les engrenages du Canadarm peuvent être contrôlés manuellement et cela indépendamment les uns des autres
Équipements complémentaires
Orbiter Boom Sensor System
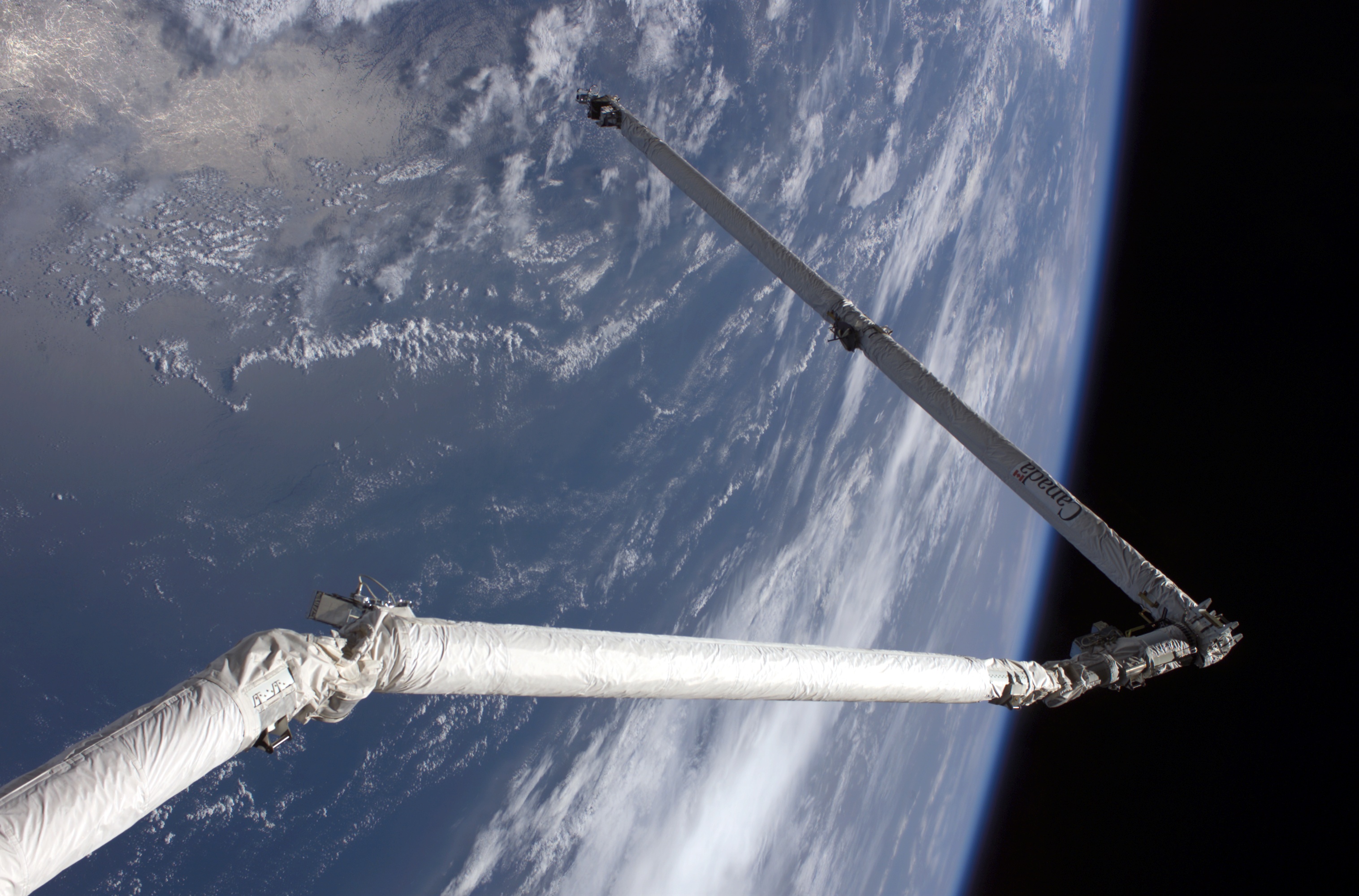
Article détaillé : Orbiter Boom Sensor System. Le bras manipulateur lors de la mission STS-114 le 22 juillet 2005. On distingue les trois segments du Canadarm avec à son extrémité la perche d'inspection
Le bras manipulateur lors de la mission STS-114 le 22 juillet 2005. On distingue les trois segments du Canadarm avec à son extrémité la perche d'inspectionDepuis la destruction de la Columbia le 1er février 2003 dû à un dommage de son bouclier thermique et entraînant le décès de tout l'équipage de la navette, la NASA a équipé le SRMS de l'Orbiter Boom Sensor System (OBSS) qui permet d'inspecter l'extérieur de la navette spatiale et plus particulièrement son bouclier thermique.
L'OBSS se présente sous la forme d'une perche d'inspection de quinze mètres placée à l'extrémité du Canadarm et surmonté de plusieurs équipements permettant de détecter d'éventuels défauts du bouclier thermique [11]. En cas de dommage sur ce dernier, une procédure de réparation pourrait être effectuée, si ce n'est pas possible, une seconde navette décollerait pour récupérer l'équipage.
Manipulator Foot Restraint

Le Manipulator Foot Restraint (MFR) est un support pour les astronautes lors de leurs sorties extravéhiculaires qui se fixe sur l'effecteur et leur offre une grande stabilité tout en étant mobile, sans qu'ils aient besoin de se préoccuper d'être attaché à la navette spatiale.
Les pieds des astronautes reposent sur une plaque d'aluminium fixés par deux attaches. Le MFR au complet, qui comprend la plaque et le système d'attache à l'effecteur, pèse 46 kg [12].
La première utilisation du MFR a été réalisé lors de la mission STS-41B par Robert L. Stewart. C'est durant cette mission qu'a également été testé pour la première fois le Manned Maneuvering Unit (MMU), qui est un siège autopropulsé permettant aux astronautes d'être totalement libre lors de leurs sorties extravéhiculaires [13].
Coûts
Pour un investissement de 108 millions de dollars, qui a servi au développement, la conception et le test du premier Canadarm, le gouvernement canadien a permis de générer avec le Canadarm 700 millions de dollars en vente à l'exportation, auquel s'ajoute 20 millions de dollars chaque année pour la maintenance [8].
Voir aussi
- Système mobile de service, ou Canadarm2 sur l'ISS
- Bras télémanipulateur européen, prévu pour être installé sur l'ISS
Références
- ↑ (fr) Historique des vols du Canadarm, Agence spatiale canadienne. Mis en ligne le 8 novembre 2006, consulté le 27 août 2007
- ↑ (fr) Répondre à de nouveaux besoins, Agence spatiale canadienne. Mis en ligne le 8 novembre 2006, consulté le 27 août 2007
- ↑ a , b et c (en) NSTS 07700, Volume XIV, Appendix 8 - System Description and Design Data - Payload Deployment and Retrieval System, NASA. Consulté le 6 septembre 2007
- ↑ (en) The Shuttle Remote Manipulator System -- The Canadarm, MacDonald Dettwiler Space and Advanced Robotics Ltd. Consulté le 3 septembre 2007
- ↑ Trois images : une montrant l'intérieur de l'effecteur avec les trois câbles désserrer, une autre avec les trois câbles resserrer et un gros plan sur le collet
- ↑ a et b (en) NSTS 1988 News Reference Manual - Payload Deployment Aand Retrieval System, NASA. Consulté le 3 septembre 2007
- ↑ a , b , c et d (fr) La structure du Canadarm, Agence spatiale canadienne. Mis en ligne le 8 novembre 2006, consulté le 27 août 2007
- ↑ a , b et c (fr) La naissance d'une légende, Agence spatiale canadienne. Mis en ligne le 8 novembre 2006, consulté le 27 août 2007
- ↑ (en) Comment fonctionne le bras canadien?, Radio-Canada. Mis en ligne le 26 mai 1996, consulté le 3 septembre 2007
- ↑ (en) Remote Manipulator System, NASA. Consulté le 29 août 2007
- ↑ (fr) Perche d'inspection conçue par MDA : un des outils essentiels à la reprise des vols, Agence spatiale canadienne. Mis en ligne le 13 juin 2006, consulté le 27 août 2007
- ↑ (en) Man-Systems Integration Standards - Volume 1 - Manipulator Foot Restraint, juillet 1995. Consulté le 8 septembre 2007
- ↑ (en) Space Shuttle Mission STS-41N - Press Kit, janvier 1984. Consulté le 8 septembre 2007
Liens externes
- (fr) Canadarm, sur le site de l'Agence spatiale canadienne
- (fr) Un bras canadien au service de la science / Les archives de Radio-Canada
 Portail de l’astronautique
Portail de l’astronautique
Catégories : Navette spatiale américaine | Programme spatial canadien



{kind=link}
{kind=link}
{kind=link}
Wikimedia Foundation. 2010.