- Dérivation vectorielle
-
Dans l'espace euclidien, c'est-à-dire dans un repère quelconque Oxyz muni de vecteurs unitaires
 , une fonction vectorielle est représentée
, une fonction vectorielle est représentée  . Ses trois coordonnées (ou composantes scalaires)
. Ses trois coordonnées (ou composantes scalaires)  sont fonction de la variable réelle
sont fonction de la variable réelle  . On dit que est une fonction réelle de . Dans ce qui suit, on conviendra que la fonction vectorielle est représentée par la symbolique :
. On dit que est une fonction réelle de . Dans ce qui suit, on conviendra que la fonction vectorielle est représentée par la symbolique : 
Sommaire
Limite d'une fonction vectorielle
Limite nulle :
tend vers  quand tend vers
quand tend vers  si les coordonnées de tendent vers 0 quand tend vers
si les coordonnées de tendent vers 0 quand tend vers Dans ces conditions :
implique que :
Limite quelconque : Soit une fonction vectorielle et un vecteur
et un vecteur  tend vers
tend vers  quand tend vers à condition que la différence
quand tend vers à condition que la différence 
Dans ces conditions :
donc :
implique que :
Propriétés des limites : La limite d'une fonction vectorielle est unique et ne dépend pas du choix du repère : Si, lorsque :
 , les fonctions vectorielles
, les fonctions vectorielles  et
et  tendent vers
tendent vers  et
et  :
: tend vers
tend vers  ,
,
et
 tend vers
tend vers 
avec
 .
.
Accroissement d'une fonction vectorielle
Soit
 l'accroissement de la variable t. On désigne par accroissement de la fonction vectorielle la différence :
l'accroissement de la variable t. On désigne par accroissement de la fonction vectorielle la différence :que l'on note
ses coordonnées sont :
 ,
, ,
, .
.
Donc :
Continuité
Lorsque
 tend vers zéro quand
tend vers zéro quand  tend vers zéro.
tend vers zéro.alors
est continue pour 
Conclusion :
 continue pour
continue pour  quand
quand 
Dérivée vectorielle
La fonction vectorielle
admet une dérivée en lorsque le rapport  tend vers un vecteur limite lorsque
tend vers un vecteur limite lorsque  tend vers zéro.
tend vers zéro.Ce vecteur limite, noté,
 est le vecteur dérivé.
est le vecteur dérivé.Lorsque
est dérivable sur un intevalle, on désigne par  ou
ou  la fonction vectorielle ainsi obtenue.
la fonction vectorielle ainsi obtenue.
Ses composantes sont ou encore
ou encore  .
.
Coordonnées de :Les coordonnées de
 sont
sont  .
.
Comme .
.Théorème
Un vecteur
 , fonction de , admet un vecteur dérivé
, fonction de , admet un vecteur dérivé  si et seulement si les coordonnées
si et seulement si les coordonnées  admettent pour dérivées les coordonnées
admettent pour dérivées les coordonnées Si existe alors 
Interprétation géométrique
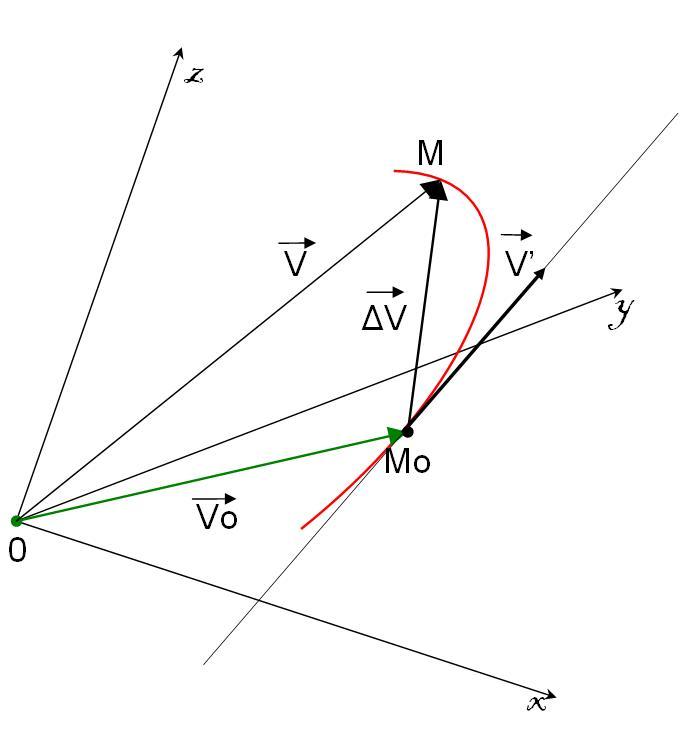
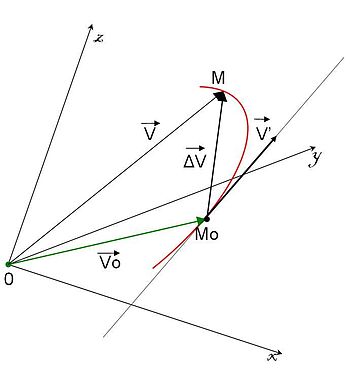 Fig.1. Représentation géométrique du vecteur dérivé V'.
Fig.1. Représentation géométrique du vecteur dérivé V'.
Soit un repère quelconque Oxyz et considérons M, un point courant d'une courbe C d'équation paramétrique fonction de t.
Supposons :
-
-
 dérivable pour
dérivable pour
-
et sa dérivée en
Considérons les vecteurs
-
-
 ,
,
-
et
-
-
 ,
,
-
on a :

Le vecteur
-
-
 est porté par la droite
est porté par la droite  (sécante à la courbe C lieu de M).
(sécante à la courbe C lieu de M).
-
Lorsque autrement dit le points
autrement dit le points  tend à se confondre avec et
tend à se confondre avec et  et la droite
et la droite  a pour limite le support de .
a pour limite le support de .On dit que la courbe C admet une tangente au point
, et le vecteur dérivé est porté par cette tangente.Principales formules de dérivation
Soit deux vecteurs :
-
-
 et
et 
-
admettant les dérivées par rapport à la variable t:
-
-
 et
et 
-
Dérivée de la somme vectorielle
Le vecteur :
a pour coordonnées :
qui admettent pour dérivée :
-
-
 qui sont les coordonnées du vecteur
qui sont les coordonnées du vecteur  .
.
-
Donc 
Dérivée du produit d'un vecteur par un scalaire
Soit
et
tous deux supposés dérivables. Le vecteur :
a pour coordonnées :
qui admettent pour dérivées
-
-
 qui sont les coordonnées du vecteur
qui sont les coordonnées du vecteur  .
.
-
Donc 
Dérivée d'une fonction vectorielle de fonction numérique
Soit :
-
-
 , une fonction vectorielle dérivable,
, une fonction vectorielle dérivable,
-
et
-
-
 une fonction numérique dérivable.
une fonction numérique dérivable.
-
Alors 
Dérivée du produit scalaire
Soit deux vecteurs dérivable :
-
-
 et
et 
-
Soit le scalaire :
-
-
 ,
,
-
Alors 
Dérivée d'un carré scalaire :
-
-
 ,
,
-
En dérivant les deux membres de l'égalité suivante :
-
-
 ,
,
-
On obtient :
D'où l'on tire :
Avec
 représentant le vecteur unitaire de ; on observe que :
représentant le vecteur unitaire de ; on observe que :On retiendra que
représente la mesure algébrique de la projection de
 sur la droite directrice support de .
sur la droite directrice support de .Dérivée d'un vecteur unitaire
Soit un vecteur unitaire définit comme suit :
Les coordonnées de ce vecteur dérivé sont :
On observe que :
-
-
 est perpendiculaire
est perpendiculaire 
-
Par récurrence :
-
-
 est perpendiculaire
est perpendiculaire
-
On en déduit que :
D'où une expression de la dérivée d'ordre n comme suit :
Dérivée du produit vectoriel
Soit deux vecteurs dérivables :
-
-
- et
-
Soit le vecteur :
sa dérivée est : 
Développement limité
Voir aussi
























Wikimedia Foundation. 2010.