- Couple bielle-manivelle
-
Système bielle-manivelle
Le système bielle-manivelle est un modèle de mécanisme qui doit son nom aux deux pièces qui le caractérisent. Il apparaît à l'aube de la Renaissance et constitue une innovation de rupture qui vient s'ajouter aux cinq chaînes cinématiques simples héritées des mécaniciens grecs. Sa cinématique, apparemment triviale, cache de vrais problèmes techniques : après plus d'un siècle d'existence, le moteur thermique n'a pu trouver d'autre alternative pour la variation de volume dans la chambre de combustion[1]. D'ailleurs les constructeurs automobiles rechignent à abandonner ce bas moteur qui marche et concentrent tous leurs efforts sur l'admission et l'échappement. Le bielle-manivelle tournera donc encore un peu...
Sommaire
Origine
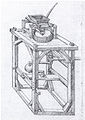
Le système bielle-manivelle représente sans doute la plus importante innovation du XVe siècle. La pensée technique allemande de cette époque nous a légué un manuscrit anonyme, daté aux environs de 1430, dit Anonyme de la guerre hussite[2]. Celui-ci comporte plusieurs dessins de moulins à bras qui constituent la première représentation figurée certaine de ce mécanisme : on y distingue parfaitement les bielles manœuvrées à bras, et les manivelles.
Par ailleurs, les techniciens se sont probablement très vite rendu compte qu'il existe deux points morts qui peuvent bloquer le système, de sorte qu'ils ont rapidement associé un volant d'inertie sur l'axe en rotation, volant constitué d'une roue ou de barres en équerre munies de maillets et qui constituent l'ancêtre du régulateur à boules.
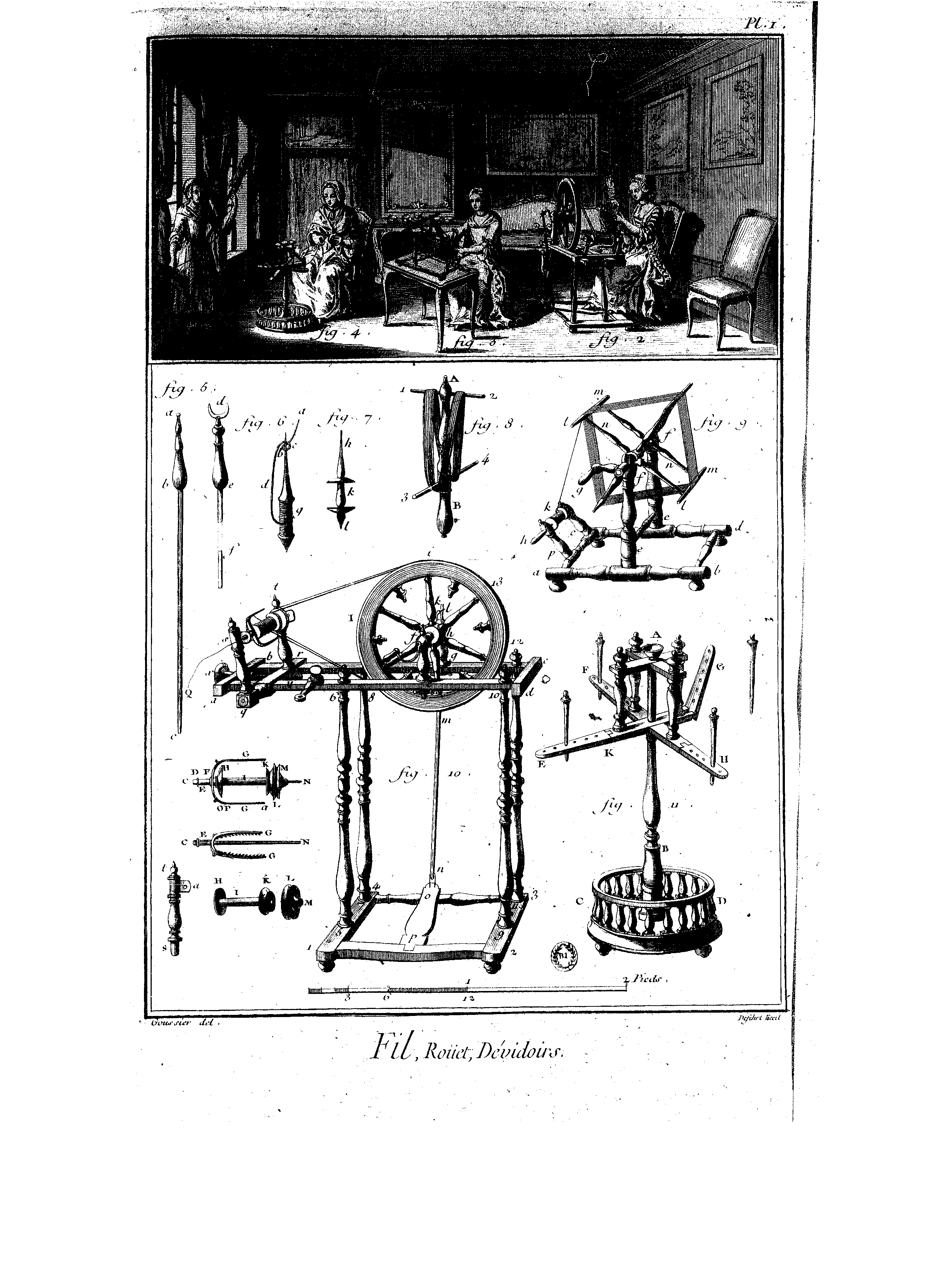
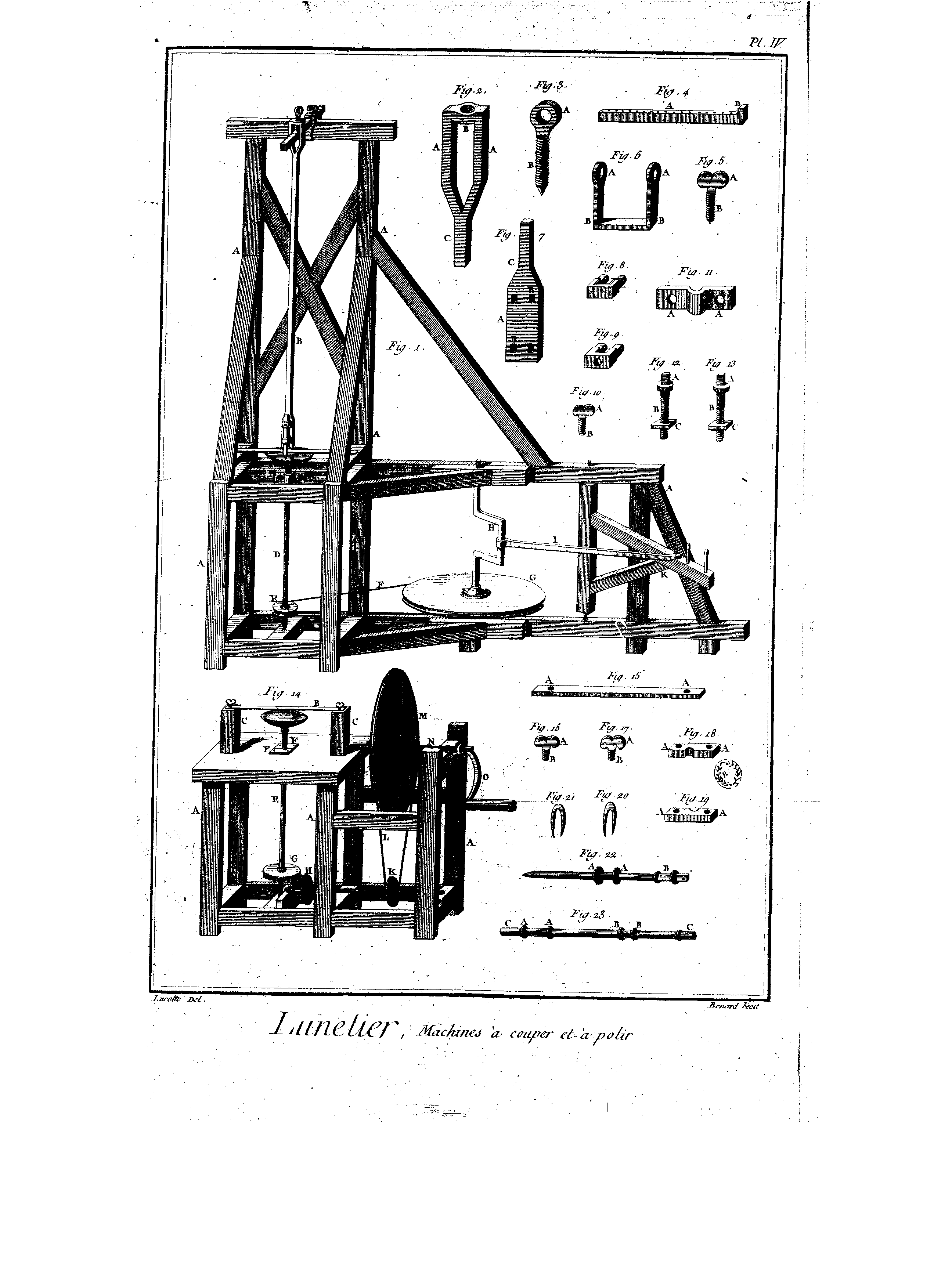
Le système bielle-manivelle a permis l’apparition d’un machinisme d’un genre nouveau, d’abord de petite taille avec les machines à pédales qui libèrent la main de l’ouvrier, comme le tour, la meule ou encore le rouet (1470). L’interdiction de ce dernier, longtemps inscrite dans les règlements de corporations montre combien cette innovation était pertinente parce que déstabilisante. Viendront ensuite des machines de plus grande taille actionnées par les roues des moulins, comme la scie hydraulique (Francesco di Giorgio Martini), la pompe aspirante et foulante (XVIe siècle) ou encore le marteau hydraulique qui permet de forger des pièces de grande dimension.
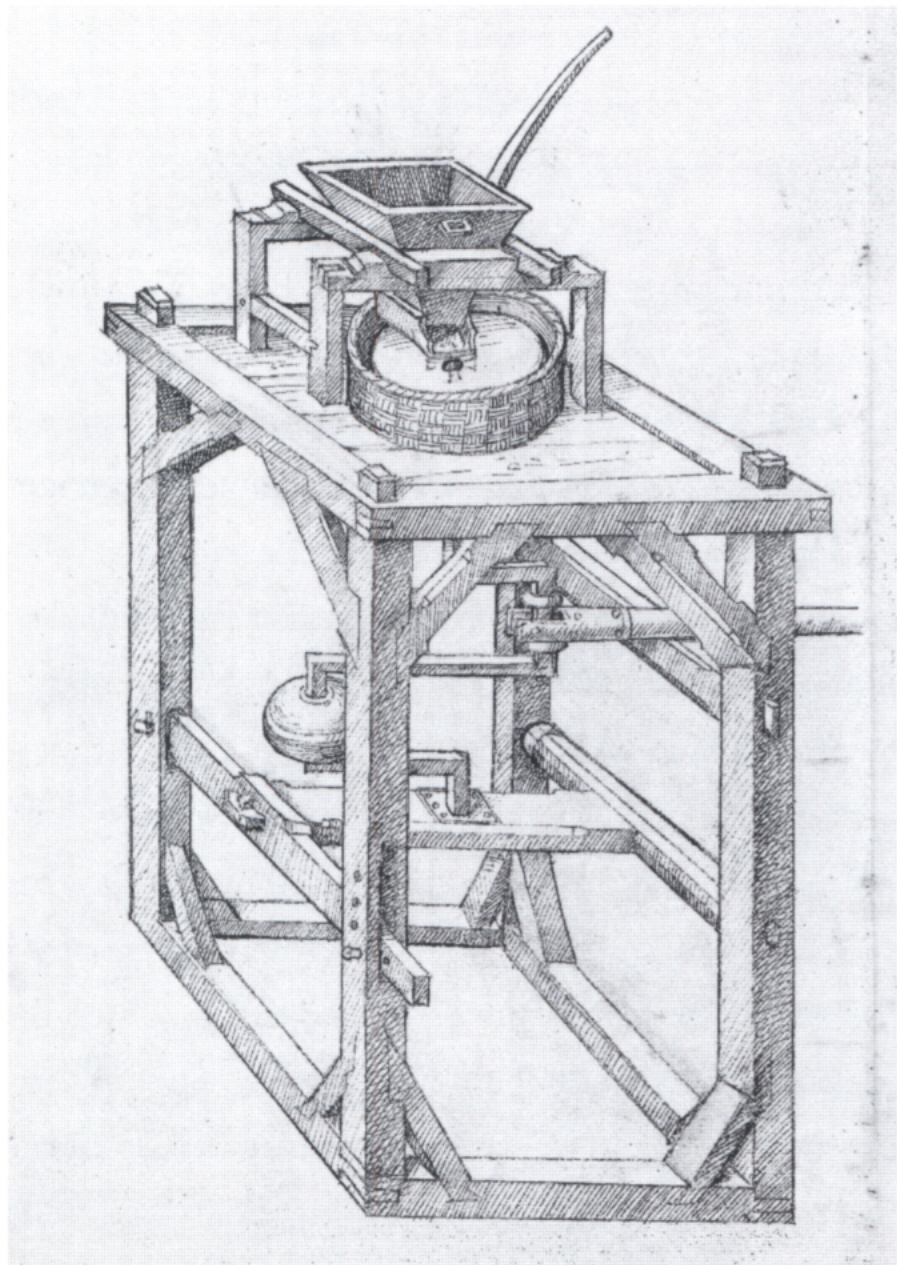
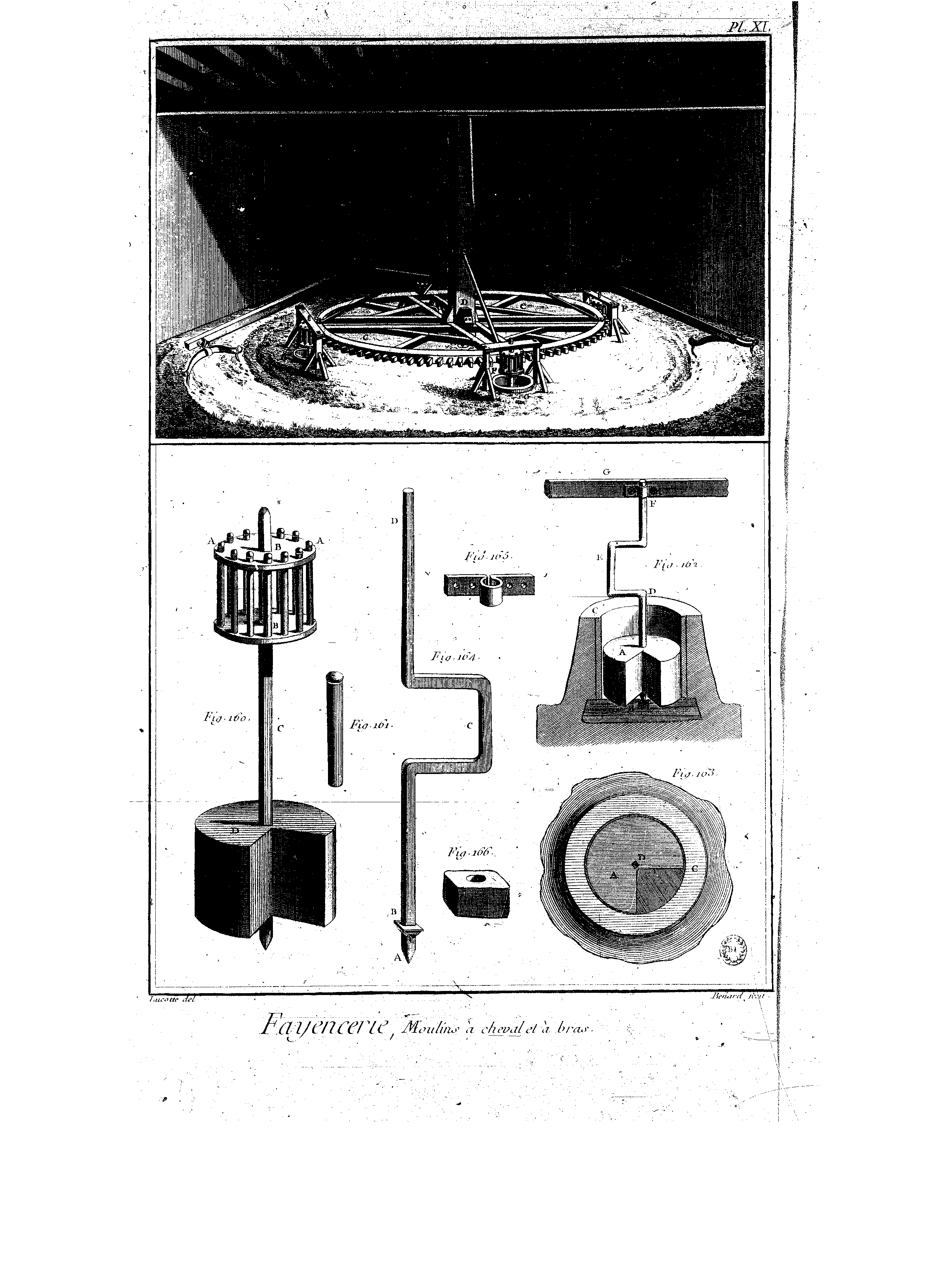
Moulin à grains (après 1480)

Moulin à bras

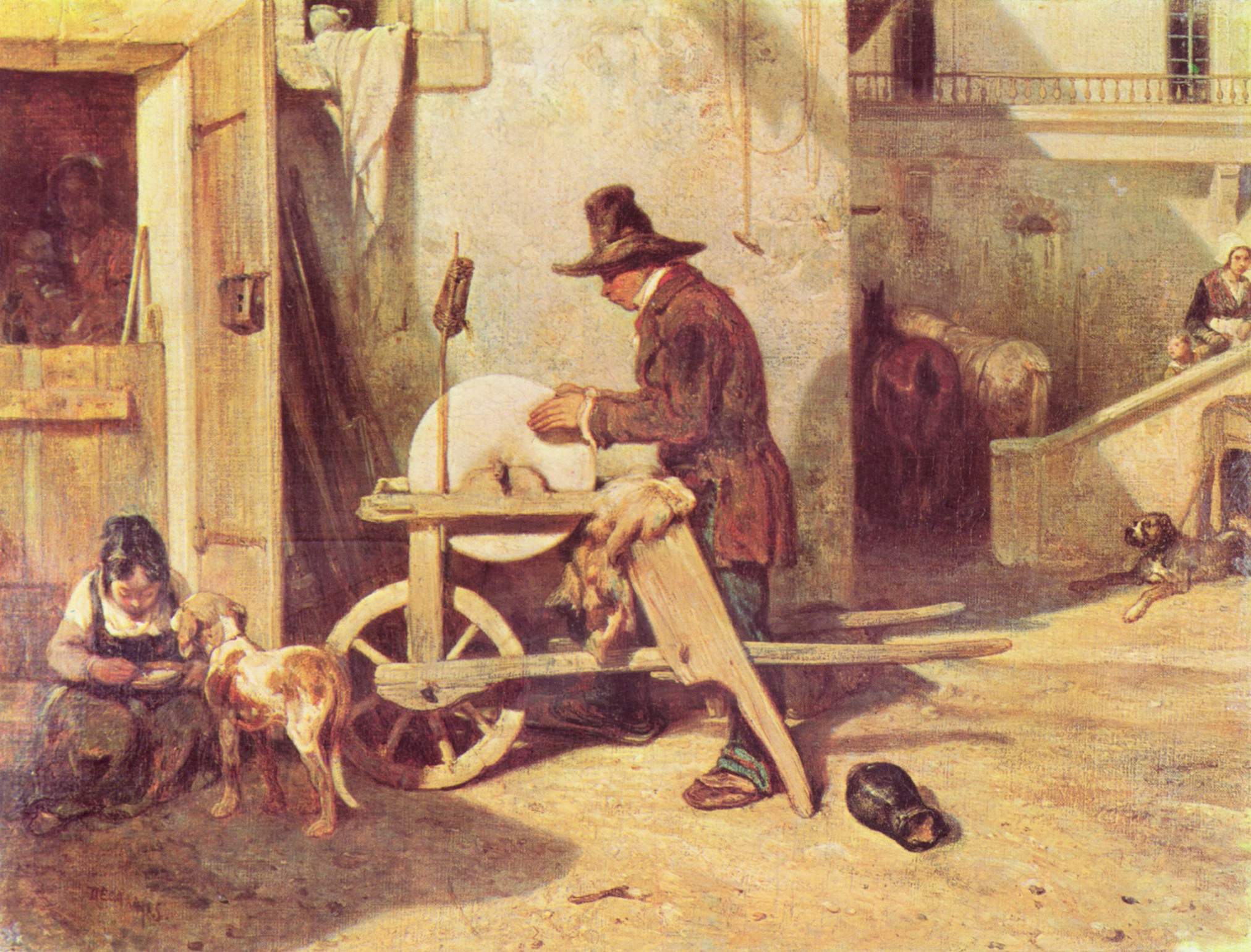
Le rémouleur (1840) Alexandre-Gabriel Decamps

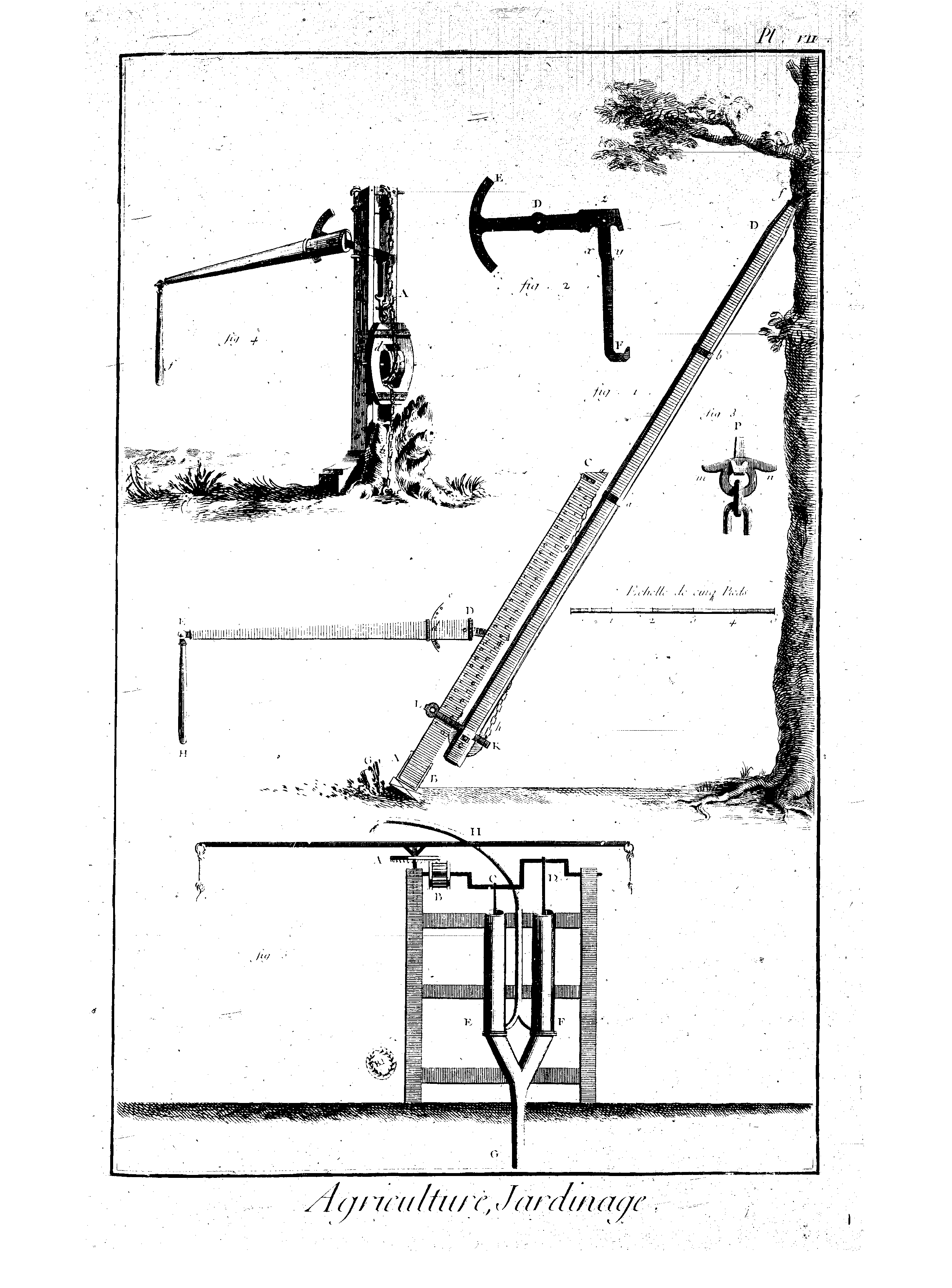
Pompe aspirante et foulante

Rouet à pédale

Machines à couper et à polir le verre
Description
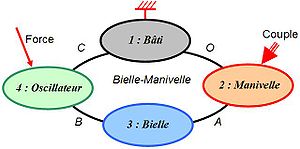
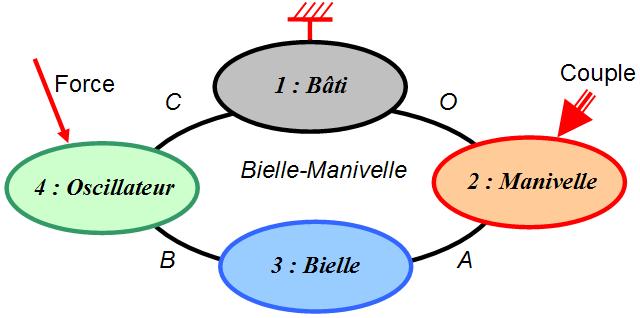
C'est, avant tout, un système mécanique de transformation de mouvement ; il est constitué de 4 pièces principales :
La manivelle et l'oscillateur constituent les deux pièces d'entrée et sortie du mécanisme. La transformation de mouvement concerne donc ces éléments. La manivelle (motrice ou réceptrice) est supposée tourner continuement dans le même sens autour de son axe, alors que l'oscillateur est animé d'un mouvement alterné.
La bielle est liée par deux articulations à, d'un côté la manivelle et, de l'autre l'oscillateur qui peut être guidé dans le bâti par deux types de liaisons :
- Liaison autorisant une translation : C'est le cas des machines à piston (pompes hydrostatiques, moteur).
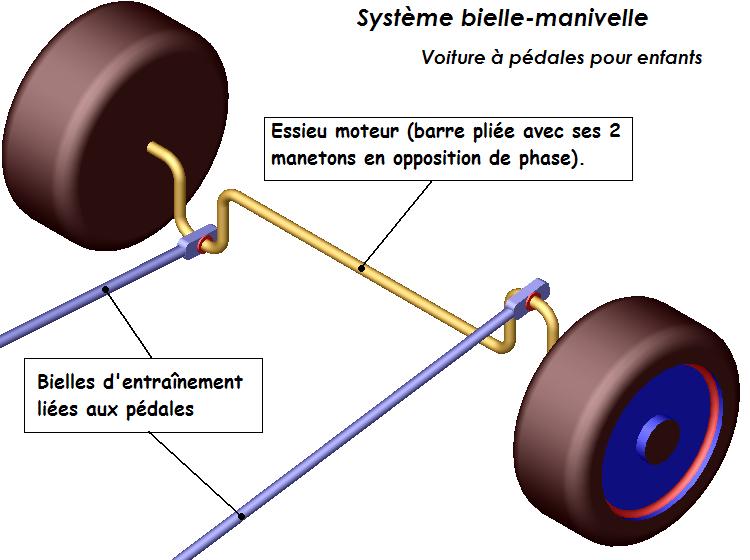
- Liaison autorisant une rotation : Ce cas est alors répertorié comme mécanisme à 4 barres (liées entre elles par 4 articulations). Il s'agit par exemple du système de tringlerie d'essuie-glace de véhicules automobiles. On trouve le mécanisme inverse sur les voitures à pédales pour enfants.
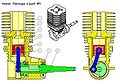
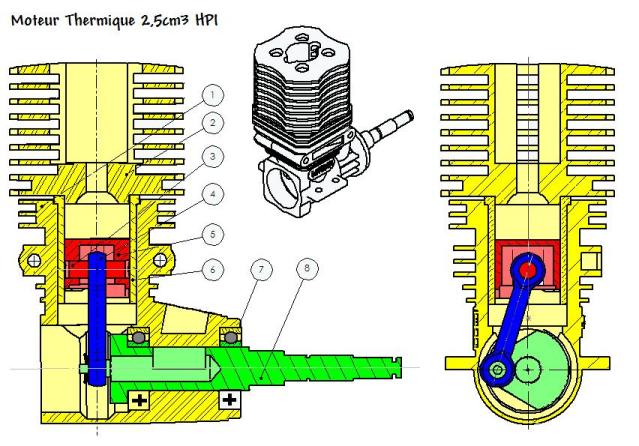
moteur
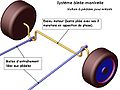
voiture à pédales
Exemples d'applications
Pour la suite de l'étude on ne considérera que des systèmes avec oscillateurs en translation. on distinguera cependant deux grandes familles :
- les moteurs à piston (la manivelle est alors réceptrice) : la source d'énergie vient des gaz introduits dans la chambre et poussant le piston.
- les pompes hydrostatiques (la manivelle est alors motrice) : un couple moteur appliqué à la manivelle anime l'ensemble, le piston propulse alors le fluide contenu dans la chambre.
- Commande de certaines barrières (péages ou parking). La lisse étant l'oscillateur, l'intérêt du dispositif réside dans la commande du moteur animant le mécanisme qui tourne dans le même sens pour la levée ou la descente de la lisse. La manivelle effectue donc exactement un demi-tour pour chaque mouvement.
- les automates des vitrines des grands magasins: Toutes les pièces animées d'un mouvement alternatif sont entraînées par des moteurs électriques tournant en continu. Simplicité et effet garanti.
Modélisation cinématique
 Article connexe : Modélisation cinématique des mécanismes.
Article connexe : Modélisation cinématique des mécanismes.Le mécanisme bielle-manivelle comporte un nombre cyclomatique égal à 1, et présente une mobilité utile. Le tableau ci-dessous répertorie les principales solutions cinématiques en indiquant le type de chaque liaison mécanique, les degrés d'hyperstatisme et de mobilité.
Exemple Liaison O 1/2 Liaison A 2/3 Liaison B 3/4 Liaison C 4/1 Mobilité Mc Hyperstatisme -Ms
Moteur pompe classique Pivot (5) Pivot (5) Pivot glissant (4) Pivot glissant (4) 1 1 Piston de section oblongue Pivot (5) Pivot (5) Pivot glissant (4) Glissière (5) 1 2 Machine vapeur (bielles très longues)
Pivot (5) Pivot (5) Pivot (5) Pivot glissant (4) 1 2 Piston de forme ovalisée ou jeu Pivot (5) Pivot (5) Pivot glissant (4) Linéaire annulaire (3) 1 0 autre combinaison admissible Pivot (5) Pivot glissant (4) Rotule(3) Pivot glissant(3) 2 0 - - - - - - - Équations horaires
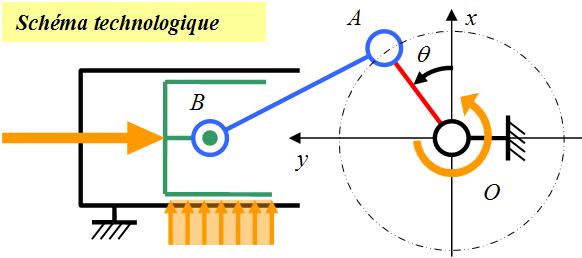
Le système bielle manivelle est un mécanisme plan. Dans le plan (x,y) du schéma suivant, on peut représenter en vraie grandeur les déplacements de chaque pièce. La géométrie dépend :
- du rayon R=OA de la manivelle ;
- de la longueur L=AB de la bielle ;
- et de la distance entre le point O et la droite de déplacement du point B.
Piston dans l'axe
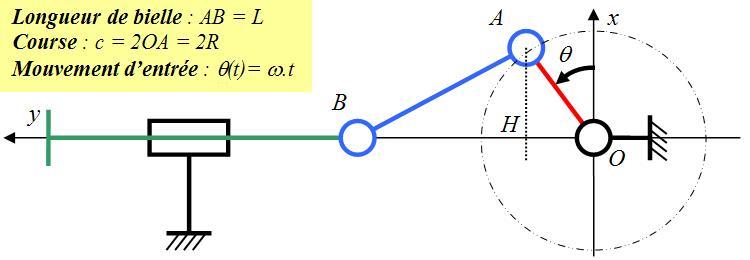
Pour cette configuration le point B est sur l'axe (O,y).
On peut repérer la position du mécanisme par la position angulaire θ de la manivelle. Cet angle est une fonction du temps.La position de B est alors définie par sa hauteur h(t)=OB.
- h(t)= OB = OH + HB = R.sinθ + L.cos(arsin(R/L.cosθ))
- avec θ=θ(t)=ω.t (par exemple).
Par dérivation on obtient alors la vitesse puis l'accélération (expressions non triviales).
On peut aussi repérer la position angulaire de la manivelle θ en fonction de la position du piston (OB) avec la formule suivante:
- θ=Arsin((R²+OB²-L²)/(2.L.R))
Remarques sur la géométrie: Pour que le système puisse faire un tour, il faut que la bielle soit au moins plus longue que la manivelle (arcsin ayant des arguments inférieurs ou égaux à 1). Notez aussi que le milieu de course du piston ne correspond pas à θ=0.
Valeurs particulières:- θ=90°: OB = R + L : c'est la position la plus haute de B, appelée point mort haut parce que sa vitesse s'annule pour changer de signe.
- θ=270°: OB = L - R : par opposition il s'agit du point mort bas. La distance séparant les deux points morts et valant 2R est naturellement appelée course du piston.
Pour un système bielle-manivelle avec piston dans l'axe, on constate donc:
- R vaut la moitié de la course du piston.
- La longueur de bielle n'a pas d'incidence sur la course. Elle contribue cependant à la symétrie du mouvement: si L est très grand devant R, celui-ci devient sinusoïdal.
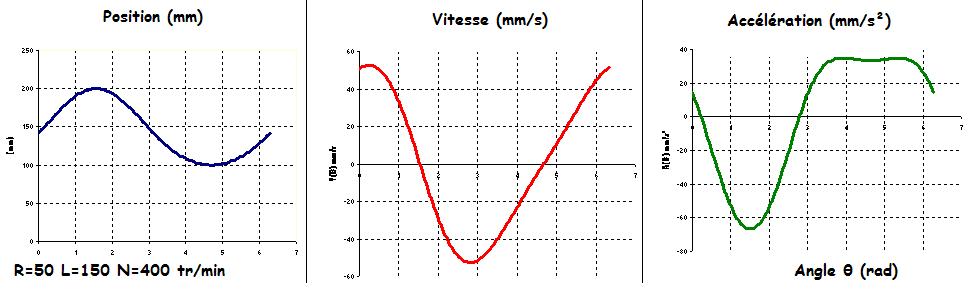
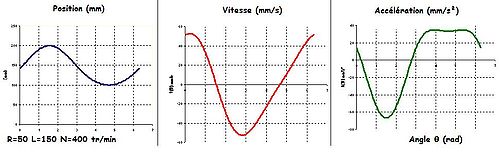 Lois du mouvement pour L=3R
Lois du mouvement pour L=3R
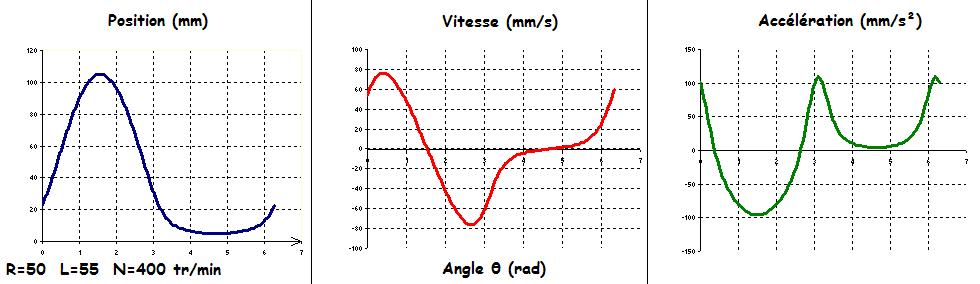
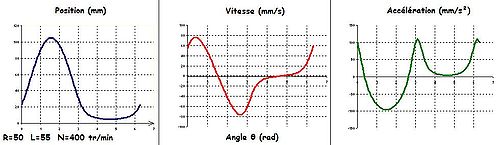 Lois du mouvement pour L≈R
Lois du mouvement pour L≈RLes courbes ci-contre obtenues à partir de l'équation horaire, donnent sur une période, la comparaison de deux configurations (avec R/L différents):
Avec L=3R, le mouvement aux alentours du point mort bas s'apparente à un mouvement uniformément varié. Les accélérations peuvent être très violentes si la longueur de bielle est trop faible. A l'autre extrême, une contrainte d'encombrement, mais aussi de résistance au flambage (ou flambement) limite la longueur de bielle. Au technicien de trouver le bon compromis.
Voici quelques exemples de valeurs pratiquées dans le cas des moteur thermiques:
- Moteur de scooter 50 cm³ : R=20 et L=80=4R (mm)
- Moteur de modélisme 6 cm³ : R=10 et L=35=3,5R
La fonction n'étant pas bijective (sur une période) et suffisamment complexe il ne sera pas donné d'expression de la rotation en fonction de la translation de B. On peut cependant considérer, que pour un moteur la vitesse de sortie est une rotation continue à vitesse constante. Pour arriver à cette fin, un volant d'inertie est monté sur l'arbre. Les vibrations engendrées par l'irrégularité du mouvement pourraient endommager l'ensemble du système.
Piston "désaxé"
Lorsque le point B est décalé, la symétrie du dispositif n'est plus respectée.
Comportement statique
L'objet de l'étude concerne ici le comportement statique du mécanisme, à savoir la détermination de la relation éventuelle entre l'effort appliqué au piston et le couple récupéré sur la manivelle (dans le cas d'une machine thermique par exemple).
Méthode statique
Pour chaque position, le mécanisme considéré à l'arrêt est en équilibre sous l'ensemble des efforts extérieures. Cette démarche est appelée quasi-statique puisqu'elle s'appuie sur le paradoxe de mouvement arrêté. C'est le principe de calcul adopté par les logiciels de simulation en mécanique, qui donnent l'évolution des efforts sur le mécanisme en équilibre tout en progressant. Cela revient à une hypothèse d'inertie nulle.
Pour cette étude les conventions sur les efforts extérieurs sont les suivantes :
- Force appliquée sur et dans l'axe du piston. F supposée connue.
- Couple sur la manivelle (dans l'axe de la manivelle) C=f(F)?
Le problème statique étant plan, il peut être résolu graphiquement ou à l'aide de torseurs; dans tous les cas, il faudra opérer l'isolement de plusieurs systèmes mécaniques. La solution la plus courte étant:
- équilibre de la bielle qui transmet l'action du piston vers la manivelle, ce qui nous renseigne sur la direction des actions transmises dans les articulations en A et B.
- équilibre du piston sous 3 actions (glissière 2D, articulation, et F ext), qui donne l'intensité des actions transmises dans les articulations en A et B.
- équilibre de la manivelle sous 3 actions (2 articulations et un couple), qui donne la valeur du couple.
L'étude F=f(C) peut être menée de même. On sera cependant obligé d'inverser les deux dernières étapes.
Méthode énergétique
En considérant que le système est de rendement 1, que la manivelle tourne à vitesse constante, et que les inerties sont négligeables, on établit une relation simplifiée donnant C en fonction de F, à partir de l'égalité des puissances consommée et fournie (produits F.V et C.ω) :
Lorsque L est suffisamment grand, le terme sous forme de fraction ne s'annulant pas, on retrouve deux points particuliers ou le couple est nul: il s'agit des points morts haut et bas pour lesquels l'action de F est donc totalement inefficace sur l'avancée de la manivelle ; en effet, il est difficile d'arracher un vélo lorsque la pédale est placée au dessus de l'axe du pédalier; l'efficacité est au contraire maximale lorsque la manivelle est à l'horizontale.
Le piston
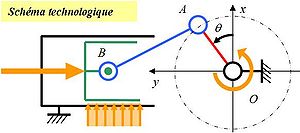
L'étude détaillée du piston montre que les actions mécaniques doivent avoir un moment nul en B. Cela implique une géométrie bien adaptée pour éviter l'arc-boutement de celui-ci dans la chemise, ce qui provoque les serrages du moteur. C'est pourquoi l'articulation B doit se trouver à l'intérieur du piston, autrement dit, la surface de contact piston/chemise doit être en vis à vis de l'axe de piston. Par exemple si la liaison pivot glissant avec le bâti est réalisée comme sur le schéma cinématique (cependant juste cinématiquement), le piston tend à se pencher et peut se coincer comme un tiroir de commode.
Cinématique
Démonstration

par développement en série :

en négligeant les ternes suivants :




(λ est le rapport de bielle, ω = const.)
Cinématique bielle-manivelle
L, la longueur de la bielle
C, la course
 , rapport bielle/course
, rapport bielle/courseDéplacement du piston :


Déplacement du piston (moteur désaxé) :

Notes

- ↑ Voir moteur Wankel.
- ↑ Les ingénieurs de la Renaissance Bertrand Gille, Thèse Histoire, Paris, 1960 ; Seuil, coll. « Points Sciences », 1978 (ISBN 2-02-004913-9)
Liens externes
 Portail des technologies
Portail des technologies
Catégories : Construction mécanique | Machine | Moteur à explosion | Dispositif mécanique

Wikimedia Foundation. 2010.