- Soyouz (véhicule spatial)
-
 Pour les articles homonymes, voir Soyouz.
Pour les articles homonymes, voir Soyouz.Vaisseau Soyouz 
Arrivée du Soyouz TMA-7 à la Station spatiale internationalePremier vol 21 avril 1967 Statut Opérationnel Nombre de vols Base de lancement Baïkonour Passagers 3 Orbite basse (200 km) Masse au lancement 7,22 tonnes Capacité manœuvre 390 m/s  Un lanceur Soyouz en position pour lancer un vaisseau Soyouz.
Un lanceur Soyouz en position pour lancer un vaisseau Soyouz.
 Le vaisseau Soyouz vaisseau de sauvetage de la station spatiale internationale.
Le vaisseau Soyouz vaisseau de sauvetage de la station spatiale internationale.Soyouz (du russe Союз, Union) désigne une famille de vaisseaux spatiaux habités soviétiques, puis russes après l'éclatement de l'URSS, conçue au début des années 1960. Le vaisseau Soyouz est, depuis 1967, le seul véhicule spatial utilisé par l'astronautique soviétique et russe pour placer en orbite ses cosmonautes. Il permet de desservir l'orbite terrestre basse et assure la relève des équipages des stations spatiales : Saliout dans les années 1970, Mir dans les années 1990 et enfin la Station spatiale internationale depuis 1998. Depuis l'arrêt de la navette spatiale américaine en juillet 2011, Soyouz est devenu le seul vaisseau capable d'assurer la relève de l'équipage permanent de la station spatiale jusqu'à ce que les États-Unis mettent au point des lanceurs et vaisseaux permettant le transport d'astronautes.
Le vaisseau Soyouz d'une masse de 7 tonnes et long d'environ 9 mètres est composé de 3 sous-ensembles : un module de service qui regroupe la propulsion et l'avionique, un module de descente dans lequel l'équipage se tient durant le lancement et qui est le seul à revenir au sol et enfin un module orbital qui est utilisé par les cosmonautes durant leur séjour en orbite. Ce dernier comprend le système d'amarrage et l'écoutille permettant de passer dans la station spatiale après l'amarrage à celle-ci. Capable de transporter 3 cosmonautes, Soyouz apporte, à l'époque de sa mise en service, un grand nombre d'innovations notamment son système de rendez-vous et d'amarrage automatique. Selon les versions, Soyouz peut effectuer un vol autonome d'une durée comprise entre 3 à 15 jours ou rester dans l'espace amarré à la station spatiale jusqu'à 200 jours. Le vaisseau est lancé de manière exclusive par le lanceur éponyme Soyouz depuis la base de lancement de Baïkonour et revient à terre à proximité de son point de départ lorsque le vol se déroule de manière nominale.
Soyouz est développé à compter de 1962 par les bureaux d'étude de Sergueï Korolev pour remplacer le vaisseau Voskhod aux capacités limitées. Il est décliné au début en plusieurs versions : l'une d'entre elle est utilisée pour le programme Zond (1967-1970), un ensemble de missions circumlunaires qui sera interrompu prématurément ; une autre version devait assurer le transport des cosmonautes soviétiques chargés de se poser sur la Lune avant que le projet ne soit abandonné en 1974. Enfin une version cargo sans équipage capable de transporter plus de 2,5 tonnes de fret, le vaisseau Progress, a été développée pour ravitailler les stations spatiales. La mise au point de Soyouz fut difficile et ses débuts sont marqués par les accidents de Soyouz 1 (1967) et Soyouz 11 (1971) qui ont entrainé le décès des équipages. Le système de rendez-vous et d'amarrage sera long à mettre au point mais par la suite le vaisseau prouvera sa grande robustesse de conception en survivant à plusieurs rentrées atmosphériques peu orthodoxes.
Plusieurs versions du vaisseau standard se sont succédé depuis le premier vol du vaisseau Soyouz sans remaniement fondamental : Soyouz T à compter de 1976, Soyouz TM à partir de 1986, Soyouz TMA à compter de 2002. Le remplacement du vaisseau Soyouz est à l'étude depuis le début des années 2000 : plusieurs concepts sont étudiés au cours de la décennie tels que la navette Kliper ou le vaisseau russo-européen plus classique ACTS mais aucun projet n'a jusqu'à présent abouti faute de ressources financières.
Contexte
En 1957 le programme Spoutnik, qui va déclencher la course à l'espace, est en cours de développement. Dès cette époque, son concepteur, Sergueï Korolev, étudie les plans d'un lanceur capable de réaliser des missions plus ambitieuses notamment un vol habité autour de la Lune. Malgré le désintérêt des militaires soviétiques qui jouent à l'époque un rôle majeur dans le déroulement du programme spatial soviétique, il demande en 1959 à un de ses collaborateurs de travailler sur l'avant-projet d'un vaisseau spatial habité, baptisé Sever (Nord) capable d'effectuer le tour de la Lune. Fin 1959 il parvient à attirer l'attention du dirigeant soviétique de l'époque Nikita Khrouchtchev sur le sujet en lui faisant part des premiers travaux de la NASA sur un lanceur lourd qui deviendra la fusée Saturn : il obtient ainsi le feu vert pour réaliser une étude de la fusée N-1. Celle-ci n'a toutefois pas de mission définie[1].
En avril 1962 les constructeurs astronautiques ainsi que les principaux décideurs soviétiques se réunissent à Pitsounda dans la villégiature du dirigeant de l'Union soviétique, Nikita Khrouchtchev pour définir la stratégie spatiale soviétique. Au grand dépit de Korolev, son principal rival Vladimir Chelomei, qui a su s'attirer l'appui de Khrouchtchev et, contrairement à Korolev, celui des militaires, obtient le feu vert pour son son projet de lanceur lourd UR500 rebaptisé par la suite Proton. Celui-ci doit, entre autres, être utilisé pour le lancement d'un vaisseau spatial habité chargé d'une mission circumlunaire[2].
Historique du développement
Le train spatial Soyouz (1962-1963)
 Représentation schématique du train spatial 7K 9K 11K
Représentation schématique du train spatial 7K 9K 11KFin 1962 Korolev travaille sur le successeur de sa capsule spatiale Vostok qui a placé en 1961 en orbite le premier cosmonaute soviétique Youri Gagarine mais qui ne peut transporter qu'un seul cosmonaute et a des capacités de manœuvre limitées. Le nouvel engin doit pouvoir changer d'orbite, transporter plusieurs cosmonautes, effectuer des vols de longue durée, s'amarrer à un autre vaisseau et permettre des sorties extravéhiculaires ; il doit enfin pouvoir effectuer une rentrée atmosphérique après une mission lunaire c'est-à-dire à la deuxième vitesse cosmique (11 km/s) beaucoup plus élevée que la vitesse de rentrée d'un vaisseau ayant effectué une mission en orbite basse. Pour lancer le futur vaisseau, Korolev choisit de combiner les premiers étages renforcés de la fusée Vostok, utilisée pour mettre en orbite les premiers vaisseaux habités soviétiques, et le puissant troisième étage de la fusée Molnya utilisée pour lancer les sondes spatiales. Le lanceur résultant est capable de placer 6,5 tonnes en orbite basse. Pour contrer le projet de son rival Chelomei, il propose une mission circumlunaire utilisant le nouveau vaisseau spatial baptisé 7K, qui doit emporter un équipage de 2 personnes ; deux autres vaisseaux sont chargés, après avoir été lancés indépendamment, de s'amarrer au premier vaisseau en formant un ensemble spatial baptisé Soyouz (Union). Le deuxième vaisseau 9K (ou Soyouz B) est chargé d'accélérer le train spatial tandis que le 11 K emporte du carburant supplémentaire. Ce projet, bien que concurrent de celui de Chelomei, reçoit, de manière paradoxale, en mars 1963 l'aval du Conseil Spatial chargé de coordonner la politique spatiale soviétique[3].
Courant 1963, le bureau d'étude de Korolev avance sur la conception de Soyouz sans toutefois disposer de budget. Les principales caractéristiques du vaisseau 7K, tel qu'il sera développé par la suite, sont figées à cette époque. Le vaisseau comporte deux modules habitables dont un seul, le module de descente, revient sur Terre tandis que le module orbital est utilisé uniquement en orbite. La forme en cloche du module de descente est choisie pour lui permettre de résister à une rentrée atmosphérique à grande vitesse après un retour de mission lunaire. Le 7K comporte un troisième module qui regroupe propulsion et panneaux solaires. Le premier exemplaire du nouveau lanceur, qui doit placer en orbite chacun des éléments du train spatial et qui est également baptisé Soyouz, est lancé avec succès le 16 novembre 1963. La fusée entame une longue carrière de lanceur qui se poursuit toujours en 2011 : il n'évoluera que faiblement au fil des décennies avec la version Soyouz-U (6,8 tonnes) en 1973 et la version Soyuz-FG qui peut placer 7,1 tonnes en orbite basse à compter de 2002[4],[5].
Fin 1963 Korolev reçoit la commande de deux versions militaires de son nouveau vaisseau 7K : un vaisseau de reconnaissance Soyouz-R et un intercepteur de satellites Soyouz-P. Il va en fait utiliser les moyens financiers fournis par cette commande pour développer la version civile. A la même époque Korolev choisit un système de rendez-vous automatique pour son futur vaisseau à l'opposé de la solution retenue par la NASA qui s'en remet à ses astronautes pour les manœuvres de rendez-vous. Ce choix résulte en partie de la formation des ingénieurs des bureaux d'étude soviétiques qui viennent du monde des missiles et connaissent mal l'aéronautique ; mais cette option découle également de la volonté des autorités soviétiques, réticentes pour des raisons idéologiques à donner trop d'autonomie aux cosmonautes[N 1]. Mais le rendez-vous automatique va contribuer à handicaper le projet en imposant un grande complexité technique dans un domaine, l'électronique, qui constitue un point faible de l'industrie et de la recherche soviétique[6].
Lancement du programme lunaire (1964)
Article détaillé : Programme lunaire habité soviétique.Jusque là l'astronautique soviétique n'avait pas de véritable projet d'atterrissage sur la Lune mais fin 1964 les dirigeants soviétiques, constatant les progrès de la NASA, décident de relever le défi du programme Apollo. Korolev a profondément remanié le scénario d'atterrissage sur la Lune qu'il avait communiqué précédemment aux responsables soviétiques et qui impliquait jusque là le lancement de 3 fusées géantes N-1. La solution proposée reprend la formule du rendez-vous en orbite lunaire retenue par la NASA : elle repose sur l'envoi par une unique fusée N-1 de deux vaisseaux formant le train spatial L3 dont l'un, le vaisseau orbital LOK (Lunniy Orbitalny Korabl), reste en orbite tandis que le seconde, le module lunaire LK (Lunniy Korabl), se pose sur la Lune. Le vaisseau LOK est en fait un Soyouz 7K avec un bouclier thermique et un système de propulsion renforcés ce qui porte son poids à 9,4 tonnes. Le scénario présenté est accepté par les dirigeants soviétiques et Korolev reçoit la commande en janvier 1965 de 16 ensembles L3/N-1. Les premiers vols doivent avoir lieu en 1966 avec un atterrissage fin 1968[7].
La mission circumlunaire Proton / L1 (1965)
Malgré le lancement officiel du programme d'atterrissage sur la Lune, le projet de mission circumlunaire de Chelomei est maintenu car il s'agit d'une opération de prestige programmée pour mai ou octobre 1967 qui sont deux dates symboliques en Union soviétique car associées cette année-là au cinquantenaire de la Révolution d'Octobre. Ce programme doit permettre de marquer des points auprès de l'opinion internationale en attendant le véritable débarquement lunaire. Mais Chelomei, qui a perdu son principal soutien avec la chute de Khrouchtchev remplacé par Léonid Brejnev, est en difficulté car le vaisseau LK1 ne pourra manifestement pas être prêt pour l'échéance fixée. Le lanceur UR-500 a par contre brillamment réussi son premier essai et Korolev propose aux autorités d'associer le nouveau lanceur qui peut placer 20 tonnes en orbite basse avec un vaisseau développé par ses bureaux d'études. Celui-ci est en fait un vaisseau Soyouz 7K dépourvu de module orbital pour réduire sa masse et associé à un étage de fusée Bloc D qui doit le propulser sur une trajectoire lunaire. Le nouveau scénario est accepté par l'ensemble des décideurs en octobre 1965. Mais en fait Korolev a bluffé et le train spatial dit L1 constitué par le Bloc D et le vaisseau est trop lourd de 0,5 tonne. Pour contourner le problème, il remanie le scénario de la mission circumlunaire : l'équipage doit être lancé dans un vaisseau Soyouz 7K classique par une fusée Soyouz tandis que le train L1 est lancé de son côté sans équipage par une fusée UR 500/Proton. Un rendez-vous spatial est réalisé sans amarrage (il n'y a pas de pièce d'amarrage sur le L1) puis l'équipage passe dans le vaisseau du train L1 en effectuant une sortie extravéhiculaire. Korolev est désormais aux commandes de tous les programmes spatiaux habités mais le travail restant à effectuer, qui nécessite la mise au point de trois versions du vaisseau Soyouz, du lanceur N-1 et du module lunaire LK, rend la tenue des échéances peu réaliste. Korolev, miné par un cancer dont il ignorait tout et sans doute également par le stress, décède en janvier 1966 au cours d'une opération chirurgicale qui devait être bénigne[8].
Soyouz 7K-OK : les premières missions Soyouz (1966-1970)
 La réalisation du compartiment parachute, ici ouvert (Soyouz TMA-6), à l'origine de l'accident de Soyouz 1
La réalisation du compartiment parachute, ici ouvert (Soyouz TMA-6), à l'origine de l'accident de Soyouz 1 Les équipages du vol triple des Soyouz 6, 7 et 8
Les équipages du vol triple des Soyouz 6, 7 et 8Le développement de la version qui doit rester en orbite terrestre, dite 7K-OK (OK pour « Орбитальный Корабль » c'est-à-dire vaisseau orbital), est réalisé très rapidement. Le nouveau vaisseau doit être capable d'effectuer des manœuvres orbitales et de s'amarrer à un autre vaisseau. A cet effet un système de rendez-vous automatique Igla est mis au point ainsi qu'un système d'amarrage sonde-cône dans lequel l'un des deux vaisseaux impliqués dans le rendez-vous joue un rôle passif avec une pièce d'amarrage en forme de cône tandis que le vaisseau actif est porteur d'une sonde qui doit s'emboiter dans l'autre vaisseau. Dans cette première version le système ne permet pas la mise en place d'un tunnel de communication entre les deux vaisseaux et les cosmonautes doivent rejoindre l'autre vaisseau en effectuant une sortie extravéhiculaire.
Les essais
Le nouveau vaisseau est placé en orbite pour la première fois le 28 novembre 1966, sans équipage à bord, sous l'appellation Cosmos 133, mais le vol connait des problèmes : le vaisseau, ne parvient pas à contrôler son orientation. Il entame une rentrée atmosphérique incontrôlée qui risque de le faire atterrir en Chine. Les contrôleurs au sol déclenchent le système d'autodestruction durant la descente. Le 14 décembre 1966, la fusée porteuse du deuxième exemplaire explose sur son aire de lancement en le détruisant à la suite d'une séquence d'allumage infructueuse des moteurs du lanceur : l'accident permet toutefois de vérifier le bon fonctionnement de la tour de sauvetage. Le troisième essai qui a lieu le 7 février 1967 ne se passe pas mieux : la trajectoire de Cosmos 140, qui a pu être placé en orbite, est erratique et le vaisseau s'écrase deux jours plus tard dans la mer d'Aral par 50 mètres de fond. L'astronautique soviétique, qui avait jusque-là enchaîné les premières, n'a plus réalisé de coup d'éclat depuis près de 18 mois alors que le programme Gemini américain vient de conclure un parcours sans faute. Le dirigeant soviétique Léonid Brejnev fait pression sur Vassili Michine, successeur de Sergueï Korolev, pour que le nouveau vaisseau soit lancé avec un équipage sans attendre d'autres vols d'essais, violant la règle des 2 essais préalables sans défaillance. Il est alors convenu que la date de la mission devra correspondre avec l'anniversaire de la naissance de Lénine (22 avril) ou le 1er mai, jour de la fête des travailleurs[9].
Le vol dramatique de Soyouz 1
Malgré les réticences des cosmonautes et des ingénieurs une double mission est planifiée : un premier vaisseau Soyouz est lancé avec à son bord un seul cosmonaute puis un deuxième Soyouz avec trois cosmonautes. Les vaisseaux doivent opérer un rendez-vous en orbite puis deux cosmonautes doivent passer d'un vaisseau à l'autre avant de revenir sur Terre. Le 21 avril 1967 Soyouz 1, premier vaisseau officiel de la série, est lancé avec à son bord Vladimir Komarov. Une fois en orbite, le nouveau vaisseau rencontre de nombreux problèmes : un panneau solaire ne parvient pas à se déployer, le jet des moteurs de contrôle d'attitude pollue les capteurs rendant difficile le contrôle de l'orientation. L'annulation de la suite de la mission est finalement décidée. Après avoir tenté en vain de déclencher de manière automatique la rentrée atmosphérique, Komarov réussit à amorcer la rentrée manuellement sous un angle correct. Mais durant la descente le parachute principal et le parachute de secours ne parviennent pas à se déployer normalement et la capsule s'écrase à grande vitesse au sol en tuant son occupant puis prend immédiatement feu. C'est le premier homme à périr durant une mission spatiale. Les vols de Soyouz planifiés sont suspendus. L'enquête démontre que la forme du compartiment des parachutes ne facilite pas leur extraction mais également qu'avec un parachute principal toujours attaché à la capsule, le parachute de secours ne pouvait pas se déployer correctement. Enfin plus récemment il est apparu que le produit utilisé comme revêtement thermique pour protéger la surface du module durant la rentrée atmosphérique avait pénétré durant son application dans le compartiment des parachutes, du fait d'un processus de mise en œuvre non respecté faute de temps, et avait contribué à rendre l'extraction du parachute encore plus difficile[10],[9],[11].
Premiers rendez vous orbitaux
En octobre 1967, après correction des anomalies, deux vaisseaux Soyouz sans équipage, Cosmos 186 et Cosmos 188, sont lancés et réussissent à s'amarrer automatiquement en orbite. Après trois autres missions sans équipage, Soyouz 3 est lancé en octobre 1968 avec à son bord Gueorgui Beregovoï. Celui-ci doit effectuer des manœuvres de rendez-vous puis s'amarrer au vaisseau Soyouz 2 lancé sans équipage. Beregovoï réussit à s'approcher à 50 mètres de l'autre vaisseau mais ne parvient pas à s'amarrer ; il doit renoncer pour ne pas tomber en panne de carburant. Malgré tout, cette mission permet de confirmer que le vaisseau fonctionne correctement. Le premier rendez-vous entre deux Soyouz avec équipage a lieu en janvier 1969 avec les vaisseaux Soyouz 4 et 5. Au cours de la même mission est réalisée la première et seule sortie extravéhiculaire jamais effectuée à bord d'un vaisseau Soyouz : deux cosmonautes de Soyouz 5 passent par l'extérieur pour rejoindre Soyouz 4, le module orbital servant de sas. La mission est un succès mais la rentrée de Soyouz 5, désormais occupée par le seul Boris Volynov, ne se passe pas bien : le largage du module de service échoue et le vaisseau effectue une rentrée balistique, l'écoutille tournée vers l'avant. Alors que Volynov enregistre calmement ses remarques pour faciliter l'enquête après une mission qui, pense-t'il, va lui être fatale, le module de service se désintègre sous la chaleur et le vaisseau reprend sa position normale bouclier thermique tourné vers l'avant. En se déployant le parachute se met en torche puis finit par s'ouvrir normalement mais le vaisseau effectue un atterrissage si dur que les sangles qui retiennent Volynov sur sa couchette se rompent et que le cosmonaute se casse plusieurs dents en étant projeté contre la cloison de la cabine. En octobre 1969 une mission triple est organisée (Soyouz 6, 7 et 8) puis en juin 1970 une mission de 18 jours (Soyouz 9) avec deux cosmonautes à bord pour démontrer la capacité du vaisseau à effectuer des séjours prolongés dans l'espace[12].
La version circumlunaire 7K-L1 : le programme Zond (1967-1970)
Article détaillé : programme Zond.Parallèlement au projet 7K-OK, les équipes de Michine travaillent sur la version 7K-L1 du vaisseau Soyouz chargée de réaliser un vol habité circumlunaire avant fin 1967. Huit tests sans équipage sont programmés puis quatre vols habités. Très rapidement il apparait que l'échéance du cinquantenaire de la Révolution fin 1967 ne sera pas tenue. Pour parvenir à respecter le devis de poids de nombreux équipements présents sur la version 7K-OK (périscope, capteurs), sont supprimés et la quantité d'ergols embarquée est limitée à 400 kg contre 500 kg dans la version normale. Deux tests réalisés en mars-avril 1967 avec une maquette du vaisseau donnent des résultats mitigés. Les ingénieurs ont réussi à faire maigrir le train spatial L1 et la technique du double lancement est abandonnée en juin 1967 : désormais les cosmonautes seront lancés par la seule fusée Proton. Mais celle-ci échoue à lancer le premier vaisseau 7K-L1 finalisé mais sans équipage fin septembre 1967 sonnant le glas de l'échéance fixée par les dirigeants soviétiques. Le 22 novembre le lanceur est à nouveau défaillant. Le vol suivant le 7 février 1968 place le vaisseau qui a été baptisé Zond 4 sur une orbite très elliptique simulant la trajectoire lunaire. Le vol se déroule bien mais à la suite d'une défaillance d'un capteur, la rentrée se fait au dessus d'un territoire non soviétique et le dispositif d'auto-destruction est déclenché à la demande des dirigeants. Zond 5 lancée en septembre 1968 après un parcours sans faute autour de la Lune, fait, à la suite d'une défaillance, une rentrée brutale avec une décélération de 18 g. Il peut être récupéré avec ses spécimens biologiques après avoir plongé dans l'Océan Indien. Zond 6 lancé le 10 novembre 1968 prend des photos remarquables de la Lune mais perd son atmosphère au retour et est victime d'une ouverture prématurée de son parachute. Les photographies sont récupérées dans le vaisseau qui s'est écrasé ; les autorités soviétiques annoncent triomphalement la réussite de la mission qui a ramené les premières photos en couleur détaillées de la Lune développées sur Terre, sans préciser dans quelle condition le vaisseau est parvenu au sol. Deux lancements réalisés les 20 janvier et le 19 février 1969 sont des échecs à la suite de la défaillance du lanceur. Après l'atterrissage sur la Lune de l'équipage américain d'Apollo 11 le 20 juillet 1969, le projet de mission circumlunaire soviétique perd toute signification. Néanmoins deux nouvelles missions sans équipage voleront : Zond 7 le 7 août 1969 et Zond 8 le 20 octobre 1970 réalisent pratiquement un sans faute mais le projet est arrêté et les deux derniers vaisseaux préparés ne seront pas lancés[13],[14].
Après l'abandon en aout 1974 de leur tentative d'atterrissage sur la Lune suite aux déboires répétés du lanceur N-1, les responsables soviétiques décident de se tourner vers la réalisation d'une station spatiale placée en orbite basse et occupée en permanence. Saliout 1 est lancée le 19 avril 1971 et devient la première station spatiale à être placée en orbite. La version 7K-T du vaisseau Soyouz est développée pour transporter les cosmonautes jusqu'à la station. Une écoutille est ajoutée au système d'amarrage pour permettre aux cosmonautes de passer du vaisseau à la station spatiale en « bras de chemise ». Cette version de Soyouz peut transporter 3 cosmonautes qui durant le trajet n'enfilent aucune combinaison spatiale pressurisée. Le vaisseau dispose d'une autonomie de vol de 3 jours et peut rester amarré 60 jours à la station[15].
Soyouz 10 est le premier vol de cette version. L'équipage réussit à s'amarrer à la station, mais ne peut pénétrer à l'intérieur car il lui est impossible de mettre sous pression le tunnel situé entre Soyouz et la station Saliout 1. Soyouz 11 est lancé le 11 juin 1971 avec à son bord Gueorgui Dobrovolski, Viktor Patsaïev et Vladislav Volkov et rejoint la station sans incident notable. Le 29 juin, l'équipage quitte la station à bord du vaisseau. Les cosmonautes portent une combinaison qui les protège du froid mais pas de la dépressurisation. Au moment de la séparation entre le module orbital et le module de descente, les boulons pyrotechniques se déclenchent tous en même temps au lieu d'exploser les uns à la suite des autres. La violence de la déflagration descelle deux valves utilisées pour égaliser la pression avec l'extérieur à faible altitude lorsque la pression atmosphérique est redevenue presque normale. En 30 secondes, l'habitacle est vidé de son atmosphère. L'équipage tente en vain de trouver la fuite et de l'obturer mais perd conscience en moins d'une minute et décède peu après[16],[17].
A la suite de cet accident le vaisseau est modifié pour accroitre la sécurité des cosmonautes. Durant les phases critiques du vol (lancement, manœuvre d'amarrage, retour au sol), l'équipage doit désormais porter une combinaison spatiale pressurisée Sokol mise au point pour cet usage. Les nouveaux dispositifs de sécurité accroissent le poids du vaisseau qui ne peut plus transporter désormais que 2 cosmonautes[18]. La refonte du vaisseau ainsi que la perte successive de trois stations spatiales retardent la reprise des vols jusqu'au 27 septembre 1973. Soyouz 12 est un simple vol de qualification. Le 3 juillet 1974 Soyouz 14 est le premier vaisseau à s'amarrer à une station spatiale depuis Soyouz 11[19].
Soyouz 7K-TM : le vol Apollo-Soyouz (1974-1975)
 Entrainement de l'équipage du vol Apollo-Soyouz dans un simulateur du module orbital.Article détaillé : Apollo-Soyouz.
Entrainement de l'équipage du vol Apollo-Soyouz dans un simulateur du module orbital.Article détaillé : Apollo-Soyouz.En 1972 la guerre froide à laquelle se livrent l'Union soviétique et les États-Unis fait place à une certaine détente. Dans le domaine spatial, les hostilités étaient à l'origine de la course à l'espace où chacun des deux rivaux essayait de prouver sa supériorité technique. Pour sceller de manière symbolique leur nouvelle relation, les deux superpuissances décident de mener une mission spatiale conjointe : le vol Apollo-Soyouz (ASTP pour Apollo-Soyouz Test Project) est un rendez-vous orbital entre les vaisseaux Apollo et Soyouz. Durant cette mission les deux vaisseaux doivent s'amarrer et les équipages échanger une poignée de main symbolique et mener ensemble différentes activités scientifiques.
Les deux vaisseaux d'origine ont des systèmes d'amarrage incompatibles. Un nouveau système d'amarrage symétrique, où chaque vaisseau peut jouer un rôle soit actif soit passif, est mis au point par les ingénieurs soviétiques. Le Système d'amarrage périphérique androgyne (en anglais APAS c'est-à-dire Androgynous Peripheral Attach System ou Androgynous Peripheral Assembly System)[20] est installé d'une part côté américain sur un module pressurisé assurant la liaison entre les vaisseaux Apollo et Soyouz, d'autre part sur une nouvelle version du vaisseau Soyouz dite 7K-TM (TM pour Транспортный Модифицированный,c'est-à-dire Transport Amélioré). Le vaisseau Soyouz reste biplace comme la version précédente, mais dispose de panneaux solaires dont le 7K-T était dépourvu et d'un système de support de vie qui permet d'allonger sa durée de séjour dans l'espace à 7 jours.
Le Soyouz 7K-TM est testé sans équipage le 3 avril 1974 (Cosmos 638), le 12 aout 1974 (Cosmos 672) puis le 2 décembre 1974 avec un équipage (Soyouz 16). Un lanceur Soyouz de type U, plus puissant, est utilisé pour la première fois pour lancer cette nouvelle version de vaisseau. Le 15 juillet 1975 Soyouz 19 s'envole pour la mission historique et s'amarre 2 jours plus tard au vaisseau Apollo. Cette mission conjointe russo-américaine restera unique jusqu'à ce que la navette spatiale américaine Atlantis s'amarre à la station Mir 20 ans plus tard au cours de la mission STS-71. Six vaisseaux Soyouz de la série 7K-TM sont construits. Les trois premiers sont utilisés pour des vols d'essais et le cinquième est lancé avec un équipage dans le cadre de la mission Soyouz 22 avec un caméra construite en Allemagne de l'Est montée à la place du système d'amarrage APAS. Le dernier vaisseau ne sera jamais lancé.
Soyouz T (1980-1986)
 Schéma Soyouz de type T
Schéma Soyouz de type TEn 1965 un projet de vaisseau spatial militaire basé sur le modèle Soyouz 7K-OK est lancé, le 7K-WI (en russe К-ВИ, ВИ abréviation de Военно-Исследовательский c'est-à-dire en français à but militaire et scientifique) également connu sous l'appellation Zvezda (appellation reprise pour un module de la Station spatiale internationale). Mais dès 1967 le développement de ce vaisseau est abandonné au profit d'un projet de station spatiale Soyouz-VI comprenant un module orbital et un vaisseau porteur de type 7K-S (en russe 7К-С С abréviation de Специальный c'est-à-dire objectif spécial) développé à partir du 7K-OK mais incluant un grand nombre de modifications. Le projet Soyouz-VI est à son tour abandonné au début des années 1970 mais le développement du 7K-S continue avec comme objectif de fournir un vaisseau spatial militaire pour des vols autonomes. Du fait de la longue durée de la phase de développement de cette version, de nombreux perfectionnements peuvent être apportés au nouveau modèle. Les principales modifications portent sur le système de propulsion, les télécommunications en vol et au sol, le calculateur embarqué ainsi que le système d'amarrage. Le nouveau système d'amarrage est installé dès 1971 sur la version 7K-T.
En 1974, alors que le nouveau modèle est prêt à voler, le projet est abandonné par les militaires. Il est alors décidé d'adapter le nouveau modèle pour la desserte des stations spatiales civiles et le vaisseau est renommé Soyouz T (T pour транспортный soit Transportnyi ce qui signifie « transport »). Le Soyouz T peut transporter trois cosmonautes équipés de leur combinaison spatiale Sokol et comporte de nouveau des panneaux solaires qui lui permettent de voler de manière autonome durant 4 jours. Le temps d'amarrage maximum à une station spatiale passe à 180 jours. Tandis que la version civile est développée, trois vols destinés à tester la version militaire ont lieu, le premier le 6 aout 1974 (Cosmos 670) et le dernier le 29 nombre 1976 (Cosmos 869). Trois vols sans équipage du Soyouz-T ont lieu à compter de 1978. La première mission avec équipage, Soyouz T-2, est lancé le 5 juin 1980. Par la suite les Soyouz T sont utilisés pour assurer la relève des équipages des stations spatiales soviétiques Saliout 6 et Saliout 7. Le quinzième et dernier lancement du Soyouz-T a lieu le 13 mars 1986 (vol Soyouz T-15).
Soyouz TM (1987-2002)
 Un vaisseau Soyouz de type TM amarré à la station Mir
Un vaisseau Soyouz de type TM amarré à la station MirLe Soyouz TM ( M pour модифицированный soit Modifitsirovannyi qui signifie modifié) est la version utilisée pour assurer la relève des équipages de la version Mir et de la station spatiale internationale à ses débuts. Le système d'amarrage du module orbital est allégé et la sonde est d'un nouveau type. Le système de rendez-vous automatique Kours, qui remplace le système existant utilise 2 antennes omnidirectionnelles qui permettent d'« accrocher » la station à une plus grande distance et sous des angles plus variés. Le module orbital se sépare du module de descente avant les manœuvres de freinage précédant la rentrée atmosphérique ce qui permet d'utiliser moins de carburant lorsque les rétrofusées sont utilisées. Le bouclier thermique est allégé. Les économies de masse sur la structure du vaisseau à vide permettent d'emporter plus de carburant pour les changements d'orbite et autres manœuvres. 33 lancements ont lieu de 1987 à 2002[21].
Soyouz TMA : la version anthropométrique (2002-)
Le Soyouz TMA (A pour антропометрический soit Antropometricheskii qui signifie anthropométrique) est une version dont une des missions est de pouvoir servir de vaisseau de sauvetage à la station spatiale internationale à la suite de l'abandon du développement du CRV américain qui devait jouer ce rôle. Le Soyouz TMA permet de transporter des personnes de taille plus grande ou au contraire plus petite qu'auparavant : la taille minimale passe de 1,64 mètre à 1,50 mètre et la taille maximale passe de 1,84 à 1,9 mètre tandis que le poids autorisé est désormais compris entre 50 et 95 kg (auparavant 56 et 85 kg). Avec les versions précédentes 50% des astronautes de la NASA ne pouvaient pas être transportés par le Soyouz. La nouvelle version qui est opérationnelle depuis 2002, permet d'amener 100 kg de fret à la station et d'en ramener 50 kg. Enfin le système de parachute est amélioré. Un ordinateur numérique avec une planche de bord plus légère est utilisé pour piloter le vaisseau à la place de l'ancien système analogique. De nouvelles rétrofusées sont utilisées pour le freinage avant l'atterrissage permettant de réduire la vitesse dans une fourchette de 1,4 à 2,6 m/s contre 2,6 à 3,6 m/s précédemment[22].
Tableau comparatif des différentes versions du vaisseau Soyouz[23]Version: Soyouz-A 7K-OK 7K-T 7K-TM Soyouz T Soyouz TM Soyouz TMA Vaisseau complet Masse totale (kg) 5880 6560 6800 6680 6850 7250 7220 Longueur (m) 7,40 7,95 7,48 7,48 7,48 7,48 6,98 Diamètre maximum (m) 2,50 2,72 2,72 2,72 2,72 2,72 2,72 Envergure (m) ? 9,80 9,80/– 8,37 10,6 10,6 10,7 Module orbital (BO) Masse totale (kg) 1000 1100 1350 1224 1100 1450 1370 Longueur (m) 3,00 3,45 2,98 3,10 2,98 2,98 2,98 Diamètre (m) 2,20 2,25 2,26 2,26 2,26 2,26 2,26 Volume habitable (m³) 2,20 5,00 5,00 5,00 5,00 5,00 5,00 Module de commande (SA) Masse totale (kg) 2480 2810 2850 2802 3000 2850 2950 Longueur (m) 2,30 2,24 2,24 2,24 2,24 2,24 2,24 Diamètre (m) 2,17 2,17 2,17 2,17 2,17 2,17 2,17 Volume habitable (m³) 4,00 4,00 3,50 4,00 4,00 3,50 3,50 Module de service (PAO) Masse totale (kg) 2400 2650 2700 2654 2750 2950 2900 Masse d'ergols (kg) 830 500 500 500 700 880 880 Longueur (m) 2,10 2,26 2,26 2,26 2,26 2,26 2,26 Diamètre à la base (m) 2,30 2,15 2,15 2,15 2,15 2,15 2,15 Diamètre maximum (m) 2,50 2,72 2,72 2,72 2,72 2,72 2,72 Caractéristiques techniques

Architecture
Le vaisseau Soyouz dans la version TMA utilisée actuellement est conçu pour transporter jusqu'à trois cosmonautes en orbite basse et s'amarrer à une station spatiale puis ramener ses occupants sur Terre. Il peut séjourner 180 jours en orbite à condition d'être amarré à la station spatiale ; le vaisseau peut naviguer de manière autonome durant 14 jours[24]. L'architecture retenue vise à lui permettre de remplir sa mission avec la masse la plus faible possible. Pour y parvenir on a fait en sorte de réduire le plus possible la masse du véhicule qui revient sur Terre : chaque gramme économisé réduit en proportion le poids du bouclier thermique, des parachutes et du carburant utilisé par les rétrofusées assurant la rentrée atmosphérique. Deux solutions ont été mises en œuvre pour remplir cet objectif[25].
- Les systèmes et le volume habitable qui ne sont pas nécessaires pour le retour sur Terre sont rassemblés dans un module orbital, qui est largué avant le retour sur Terre[25].
- La partie du vaisseau qui revient sur Terre, appelé module de descente, a une efficacité volumétrique optimale c'est-à-dire que le ratio volume habitable/surface de la coque est le plus grand possible. La forme la plus efficace est la sphère. Toutefois elle ne convient pas à une mission lunaire que Soyouz devait initialement pouvoir effectuer. En effet un vaisseau revenant de la Lune est animé d'une très grande vitesse et il est nécessaire que la capsule ait une certaine portance pour pouvoir infléchir sa trajectoire et réduire le nombre de g encaissé par l'équipage. Pour tenir compte de cet impératif, la forme choisie, qui résulte de longs calculs, est celle d'une cloche dont le sommet aurait la forme d'une demi-sphère, les flancs étant inclinés de 7 ° par rapport à la verticale. La base, qui est la partie avant du vaisseau durant la phase de rentrée et est donc couvert d'un bouclier thermique, a la forme d'une section d'une sphère à très grand rayon[25].
Le module orbital est à une de ses extrémités relié au module de descente par un tunnel qui peut être fermé et comporte à son autre extrémité l'écoutille et le dispositif d'amarrage à la station spatiale. Le module orbital est donc situé devant le module de descente. La propulsion principale, qui permet au vaisseau de changer d'orbite est situé à l'arrière du module de descente dans un troisième module de service qui est également largué avant la rentrée. Cette configuration a donné lieu à d'intenses débats au moment de sa conception. Certains préféraient que le module de descente soit situé à l'extrémité avant du lanceur pour pouvoir être arrachée plus facilement par la tour de sauvetage en cas de lancement défaillant. Mais cette architecture supposait de percer le bouclier thermique pour permettre le passage de l'équipage dans le module orbital, créant un point de faiblesse dans ce composant essentiel pour la sécurité des cosmonautes. Le point de vue des ingénieurs de Korolev finit par l'emporter. Le résultat de cette architecture est particulièrement efficace : le vaisseau Soyouz pèse 7 tonnes et fournit un volume habitable de 9 m3 alors que le vaisseau de commande Apollo qui dispose d'un volume de 6 m3 pèse 5 tonnes auquel il faudrait ajouter un module de service de 1,8 tonne pour disposer des mêmes capacités que le Soyouz[25].
Le vaisseau a une longueur de 10 mètres et un diamètre de 2,65 mètres. Il est recouvert d'un revêtement qui assure à la fois une isolation thermique et une protection contre les micrométéorites.
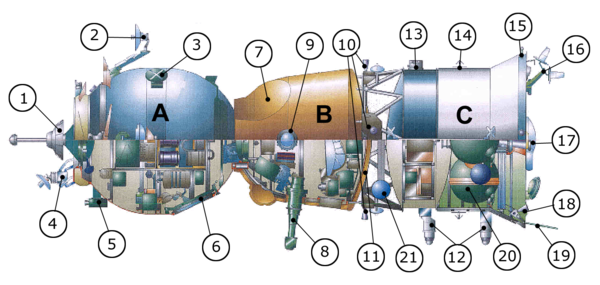 Module orbital (A): 1 Système d'amarrage et écoutille, 2 et 4 antenne Kours, 3 antenne transmission TV, 5 caméra, 6 écoutille
Module orbital (A): 1 Système d'amarrage et écoutille, 2 et 4 antenne Kours, 3 antenne transmission TV, 5 caméra, 6 écoutille
Module de descente (B) : 7 compartiment parachute, 8 périscope, 9 hublot, 11 bouclier thermique
Module de service (C) : 10 et 18 moteurs de contrôle d'orientation, 21 réservoir oxygène, 12 senseurs de Terre, 13 senseur solaire, 14 point d'attache des panneaux solaires, 16 antenne Kours, 15 capteur thermique, 17 propulsion principale, 20 réservoirs ergols, 19 antenne télécommunicationsLe module de descente
 Module de descente
Module de descente Le siège est moulé aux formes du cosmonaute pour l'aider à résister aux accélérations
Le siège est moulé aux formes du cosmonaute pour l'aider à résister aux accélérationsLe module de descente (en russe : спускаемый аппарат ; Spuskaemyi apparat abrégé en SA), situé entre le module de service et le module orbital, est la seule partie du vaisseau qui revient au sol. Il a une hauteur extérieure de 2,24 mètres, un diamètre extérieur de 2,17 mètres et fournit à son équipage un volume habitable de 3,5 m3. En forme de cloche, on trouve à sa base le bouclier thermique, à son sommet une ouverture fermée par une écoutille et sur les flancs deux hublots. L'ouverture, qui a un diamètre de 70 cm et ne peut être obturée de manière étanche que du côté du module de descente, débouche à la suite d'un court tunnel dans l'espace habitable du module orbital ; après le retour sur Terre, elle permet à l'équipage d'évacuer le vaisseau. Le parachute principal et un parachute de secours sont logés dans un compartiment de forme lenticulaire relativement volumineux qui est situé dans la partie supérieure du module et est fermé par un opercule. Toute la surface du module est recouverte d'un revêtement ablatif pour le protéger de la chaleur durant la rentrée atmosphérique. La base du module, qui subit des températures de 1 800 °C, est protégé par un épais bouclier thermique ablatif qui est largué dans la phase finale de la rentrée.
Les trois occupants sont en position allongée sur des couchettes disposées en éventail jointives au niveau des pieds mais écartées au niveau des épaules. Les couchettes sont placées au fond du module non loin de la cloison derrière laquelle se situe le bouclier thermique. La tête est plus haute que la partie inférieure du corps pour permettre aux cosmonautes d'accéder aux panneaux d'instruments qui leur font ainsi face. Chaque couchette est adaptée aux mensurations de son occupant et l'enveloppe en particulier au niveau de sa tête tandis les genoux sont relevés ce qui doit l'aider à supporter l'accélération (cf photo ci-contre). Entre les couchettes et le bouclier thermique se trouvent une partie de l'électronique du bord. Au-dessus de la tête des astronautes, le compartiment des parachutes ainsi que des filets réservés au fret transporté viennent restreindre le peu d'espace vital disponible.
Le commandant du vaisseau est installé sur la couchette centrale, l'ingénieur de vol est à sa gauche tandis que le troisième occupant, qui ne joue aucun rôle dans la conduite du vaisseau depuis la version TMA, est installé à sa droite. Le commandant est le responsable de la mission : il communique avec le contrôle au sol et réalise les manœuvres de changement d'orbite, d'orientation et de rendez-vous. Il dispose à cet effet de deux manettes de chaque côté de sa couchette, l'une permet d'effectuer des manœuvres de translation dans les trois axes (accroitre la vitesse, rehausser l'altitude,...) tandis que l'autre agit sur l'orientation du vaisseau (roulis, tangage, lacet). Il ne dispose pas de hublot mais de l'image fournie pas un périscope dont l'écran lui fait face et dont la partie optique déborde largement de la coque du vaisseau pour lui permettre d'observer vers l'avant lors des manœuvres d'amarrage. L'optique peut être également orientée vers la Terre. L'ingénieur de vol surveille notamment les paramètres d'orientation du vaisseau et le système de support de vie du vaisseau.
Le commandant et l'ingénieur de vol ont face à eux un tableau de bord qui comprend depuis la version TMA deux écrans, un certain nombre de voyants fournissant des informations sur l'état du vaisseau et des boutons poussoirs utilisés pour lancer des commandes. Les écrans peuvent superposer des informations sur la navigation, les images des caméras extérieures, le résultat des commandes passées et donner des informations sur le statut du vaisseau[26] , [27].
Le module de descente dispose de 8 petits moteurs d'orientation de 10 kg de poussée qui sont utilisés durant la rentrée atmosphérique pour adopter une trajectoire limitant la décélération à environ 4 g. Ces moteurs sont alimentés par un mélange de peroxyde d'hydrogène. La durée de vie en orbite du Soyouz est limité à six mois principalement à cause de l'utilisation de ce carburant qui perd progressivement son oxygène et augmente la pression dans les réservoirs. Une batterie à la puissance limitée et un ordinateur de navigation et de pilotage secondaire sont utilisés uniquement durant la phase de rentrée lorsque le module de service qui contient l'avionique principale a été largué.
Le module orbital
 Le module orbital
Le module orbitalLe module orbital (en russe бытовой отсек, Bytovoi otsek c'est-à-dire compartiment de vie abrégé en BO) est situé à l'avant du vaisseau. Utilisé par l'équipage comme lieu de travail et de séjour une fois le vaisseau en orbite il est largué au retour avant la rentrée atmosphérique et est détruit. Il pèse selon les versions entre 1 et 1,4 tonne (dans sa dernière version) et a une forme ovoïde avec des extrémités aplaties. Avec un diamètre maximal de 2,3 mètres et une longueur de 2,65 mètres (1,8 mètre dans l'habitacle) l'équipage dispose d'un volume de 5 m3. Le module comporte à sa partie supérieure un système d'amarrage sonde-cône avec en son centre une ouverture de 80 cm de diamètre fermée par une écoutille par lequel le vaisseau s'amarre à la station spatiale et à l'opposé une ouverture fermée par une écoutille qui le relie par un petit tunnel au module de descente. L'équipage utilise une troisième ouverture latérale dans la partie inférieure pour s'installer dans le vaisseau avant son lancement ; cette ouverture a également été utilisée pour effectuer la sortie extravéhiculaire de la mission conjointe Soyouz 4 / 5. Dans les premières versions de Soyouz, le module dispose de deux hublots latéraux : l'un est utilisé pour les observations de la Terre et l'autre pour celles de l'espace ; à partir de la version TM il existe un troisième hublot tourné vers l'avant utilisé pour les manœuvres d'amarrage à la station spatiale. A l'extérieur les antennes du systèmes Kours de rendez-vous automatique sont fixées à l'avant du module[28].
A l'intérieur du module se trouvent rangés la nourriture et la réserve d'eau du vaisseau (30 litres), un dispositif pour les toilettes, l'avionique pour le système d'amarrage. Le mobilier comporte des placards, une couchette et une table pliante. Des équipements spécifiques à la mission peuvent être ajoutés[28].
Le module de service
 Propulseurs à l'arrière du module de service
Propulseurs à l'arrière du module de serviceLe module de service (en russe : приборно-агрегатный отсек ; Priborno-Agregatnyi Otsek c'est-à-dire Compartiment des instruments de bord abrégé en PAO) situé à l'arrière du vaisseau contient la propulsion principale et certains des moteurs de manœuvre avec leur réservoirs. Long de 2,26 mètres, il a un diamètre moyen de 2,26 m et un diamètre maximum de 2,72 mètres. Le module comprend lui-même trois parties en allant de l'avant vers l'arrière :
- la première section est constitué d'un treillis de poutrelles qui assure la liaison mécanique entre le module de descente et le module de service et sur lequel sont fixés une partie des moteurs de contrôles d'orientation ainsi que des bonbonnes d'oxygène.
- Le compartiment de l'instrumentation est une partie pressurisée remplie de gaz inerte (azote) dans laquelle sont situés les ordinateurs principaux assurant la navigation, le guidage et le contrôle du vaisseau ainsi que les batteries principales.
- La dernière section, la plus importante en taille, est non pressurisée et contient la propulsion principale ainsi que les réservoirs d'ergols. La propulsion principale utilisée pour les changements d'orbite et les corrections est constituée d'un moteur d'une poussée de 316 kg et qui peut être remis à feu quarante fois. Les manœuvres d'orientation sont réalisées par 28 petits moteurs divisés en 2 sous-ensembles comportant chacun 12 moteurs de 26,5 Newtons de poussée et 2 de 130 Newtons de poussée. Tous les moteurs utilisent le même mélange d'ergols liquides stockables hypergoliques : l'UDMH qui est combiné avec du peroxyde d'azote est stocké dans quatre réservoirs sphériques du module de service dont la contenance initialement de 500 kg a été portée dans les dernières versions à 880 kg, capable de fournir un delta-V total de 390 m/s. Les réservoirs d'ergols sont mis sous pression par de l'hélium stocké à 300 bars dont les réservoirs sont situés dans le même module. Le module comporte également un radiateur de 8,5 m² utilisé par le système de contrôle thermique principal[29],[30].
Deux panneaux solaires fixes d'une envergure totale de 10,60 m et d'une superficie de 10 m² sont déployés de part et d'autre du module de service une fois celui-ci en orbite. Ils fournissent en moyenne 0,6 kW avec une tension de 27 Volts.
La tour de sauvetage
 Tour de sauvetage
Tour de sauvetageLa tour de sauvetage, qui surmonte le vaisseau Soyouz, comporte un unique propulseur à poudre de 676 tonnes de poussée comportant plusieurs tuyères qui peut être déclenché dès qu'il est armé soit environ 20 minutes avant le décollage jusqu'à 160 secondes après le décollage après quoi elle est larguée. Lorsque l'éjection est déclenchée, quatre panneaux canard se déploient le long du vaisseau pour stabiliser la trajectoire du vaisseau[31].
 Les manettes de vol, l'écran du périscope et une partie du tableau de bord
Les manettes de vol, l'écran du périscope et une partie du tableau de bord Gros plan sur les capteurs et moteurs de contrôle d'attitude du module de service
Gros plan sur les capteurs et moteurs de contrôle d'attitude du module de serviceComme tous les vaisseaux spatiaux, Soyouz embarque un système de guidage, pilotage et navigation embarqué. Il en existe en fait deux : le système principal, logé dans le module de service, sert durant pratiquement toute la mission tandis que le système secondaire, logé dans le module de descente et aux capacités limitées, est utilisé durant la phase de retour après le largage du module de service. Le système regroupe de manière traditionnelle trois sous-ensembles fonctionnels :
- Le système de navigation permet à l'équipage de connaitre la position du vaisseau, son vecteur de déplacement (vitesse de déplacement dans les trois dimensions) et les mouvements de rotation dont il est animé (selon les 3 axes).
- Le système de guidage permet de calculer la trajectoire vers une position ou une orientation cible et de déterminer les manœuvres à effectuer (changements de vitesse linéaire et de rotation, axes de la poussée, moment et durée) pour y parvenir
- Le système de contrôle agit sur le propulseur principal et les moteurs d'orientation pour appliquer les instructions fournies par le système de guidage.
Le contrôle d'attitude
Soyouz dispose d'un système de contrôle d'attitude qui maintient son orientation dans l'espace pour :
- optimiser l'incidence du Soleil sur ses panneaux solaires
- effectuer les manœuvres en orbite pour rejoindre un autre vaisseau (station spatiale) ou au contraire se placer sur la bonne trajectoire de rentrée atmosphérique car les moteurs ne sont pas montés sur cardan et leur poussée est orientée en faisant pivoter le vaisseau tout entier.
Pour déterminer son orientation Soyouz utilise plusieurs capteurs. Deux capteurs d'horizon infrarouge tournés vers la Terre utilisent l'horizon terrestre pour mesurer l'angle entre la verticale locale (du vaisseau) et la droite le joignant avec le centre de la Terre. Un capteur solaire procède de même avec le Soleil. Trois capteurs électroniques ioniques mesurent l'angle entre l'axe longitudinal du vaisseau et son vecteur de déplacement. Les informations fournies par tous ces capteurs sont renvoyées sur le tableau de bord. Par ailleurs deux gyromètres à deux degrés de liberté détectent les écarts angulaires en roulis et lacet par rapport à des valeurs choisies par l'équipage pour servir de référence. Enfin trois gyromètres sont chargés de mesurer les variations de vitesse angulaire sur les trois axes. Une alarme apparait sur le tableau de bord si l'écart dépasse 8 ° pour le premier ensemble de gyromètres et 6 ° sur une période de temps fixée pour le second ensemble[32].
Le vaisseau peut adopter trois modes d'orientation en fonction des phases de son vol[33] :
- Dans le mode privilégiant la puissance électrique, le vaisseau utilise le capteur solaire pour maintenir une orientation optimale par rapport à la direction du Soleil (incidence proche de la perpendiculaire du Soleil sur les panneaux solaires).
- Dans le mode inertiel, le vaisseau maintient son orientation en conformité avec des instructions fournies par l'équipage qui sont entrées notamment en réinitialisant les gyromètres. Les déviations, détectées grâce aux gyromètres et éventuellement aux autres capteurs d'orientation, déclenchent des alertes sur le tableau de bord.
- Le mode orbital maintient l'axe du vaisseau parallèle à l'axe de déplacement. Son contrôle s'appuie sur les capteurs d'horizon et les capteurs ioniques. Des écarts d'orientation de 1 à 2 ° et des dérives de vitesse angulaire de 0,07 °/s sont acceptés par le système de contrôle d'attitude.
Pour initialiser la position du vaisseau, le commandant du vaisseau peut utiliser l'écran du périscope (Vzor) qui lui permet d'aligner le vaisseau sur l'horizon. C'est une technique qui a été également utilisée par le passé lorsque tous les autres systèmes d'alignement étaient en panne avant la mise en feu des rétrofusées pour le retour sur Terre. L'orientation du vaisseau est réalisée en faisant fonctionner par de brèves impulsions des petits moteurs dédiés au contrôle de l'attitude (26,5 N) ou au contrôle de l'attitude et aux corrections d'orbite (130 N). Ces moteurs sont répartis à la jointure du module de service et du module de descente ainsi qu'à l'arrière du module de service. Le commandant peut effectuer les corrections manuellement en utilisant deux commandes situées de part et d'autre de sa couchette : la commande de gauche permet d'effectuer des mouvements de translation tandis que la manette de droite permet d'effectuer des rotations sur les trois axes par incrément de 0,5 ou 3 °.
Les télécommunications
Le vaisseau Soyouz comporte cinq systèmes de télécommunications distincts. Le système de télécommunications radio Rassvet est un système VHF à deux voies qui est utilisé par les cosmonautes pour communiquer avec le contrôle au sol, la station spatiale et entre eux. Il permet également d'enregistrer les télécommunications et de les réécouter. Le système de télémétrie embarqué (SBI) collecte les principales données de fonctionnement du vaisseau et de son équipage, les stocke et les transmet automatiquement au sol sans intervention de l'équipage. Le système Kvant-V fournit une liaison radio à deux voies qui permet entre autres le contrôle à distance du vaisseau durant les phases actives du vol orbital, la transmission des vidéos et des signaux du système de poursuite. Le système Klyost-M gère les transmissions des vidéos filmées par la caméra située près du port d'amarrage et dans le module descente. Le système de poursuite radio (RKO) répond aux signaux émis par les stations de poursuite au sol pour calculer la position et la trajectoire du vaisseau[34].
Le système de support de vie et la régulation thermique
La régulation thermique est assurée à la fois par un système passif et actif. Le système actif est constitué d'un circuit régulant la température et l'humidité des modules orbital et de descente et d'un deuxième circuit chargé d'évacuer la chaleur produite par l'électronique du bord dans le module de service. Les deux circuits aboutissent dans le module de service où la chaleur est évacuée par des radiateurs tapissant la paroi extérieure. Des ventilateurs brassent l'air dans les compartiments pressurisés. Les modules sont recouverts de plusieurs couches de matériau isolant pour limiter les échanges thermiques entre le vaisseau et l'espace[35].
La température à l'intérieur du module Soyouz est maintenue à 20 °C (± 3 °C), la pression dans la cabine dans une fourchette de 710 à 850 mm et l'humidité relative à 40-55%. L'atmosphère de la cabine est composé d'un mélange d'azote et d'oxygène dans des proportions similaires à celles rencontrées au sol contrairement aux vaisseaux spatiaux américains des années 1960-1970 qui pour économiser le poids utilisent une atmosphère d'oxygène pur. Le dioxyde de carbone est absorbé par des cartouches d'hydroxyde de lithium tandis que de l'oxygène est régulièrement libéré dans l'atmosphère : sa composition est surveillée de manière automatique et ces informations ainsi que des alarmes sont affichées sur le tableau de bord du module de descente. Des filtres absorbent et retiennent poussières et odeurs. La pression est maintenue à l'aide d'une bouteille qui contient 4,5 kg d'air comprimé et qui est également utilisée pour égaliser la pression des parties habitables après l'amarrage à la station. Cette réserve d'air peut être également employée en cas de dépressurisation accidentelle comme celle qui s'est produit au cours du vol de Soyouz 11[36].
Déroulement d'une mission Soyouz
 Entrainement à la cité des étoiles
Entrainement à la cité des étoilesLe vaisseau Soyouz est lancé exclusivement par la fusée Soyouz depuis Baïkonour, au Kazakhstan. Le retour des Soyouz se fait dans les plaines du Kazakhstan.
Entrainement de l'équipage
 Stage de survie
Stage de survieLes équipages sont entrainés à l'utilisation du vaisseau par le biais de simulateurs et sont préparés physiquement pour faire face aux accélérations mais également pour pouvoir survivre si l'atterrissage ne s'effectue pas dans la zone prévue. L'accent est mis sur la cohésion de l'équipage. Le centre d'entrainement principal se situe à la Cité des Étoiles près de Moscou, où on trouve des simulateurs de vaisseau Soyouz permettant de répéter les procédures, simuler les situations d'urgence et les manœuvres de rendez vous avec la station spatiale. Pour le programme de la station spatiale internationale, deux simulateurs Soyouz ont été fournis au centre d'entrainement des équipages de la NASA à Houston. La forme physique des cosmonautes est maintenue, entre autres, grâce à des séances de sport en salle dans un gymnase. Des séances dans une centrifugeuse, qui permet d'atteindre 20 g, préparent aux phases d'accélération qui normalement ne dépassent pas 4 g. Traditionnellement les cosmonautes russes pratiquent de manière intensive le parachutisme en vol libre et à basse altitude et beaucoup ont plus de 500 sauts à leur actif. Les cosmonautes se préparent aussi à l'apesanteur grâce à des vols paraboliques à bord d'un IL-76 qui simulent l'absence de pesanteur durant des périodes de 25 à 30 secondes[37].
L'entrainement comprend des stages de survie dans des environnements variés. La crise économique a restreint les déplacements réalisés pour mener ces stages qui auparavant comprenaient un séjour dans les contrées écartées de l'Arctique russe. L'équipage est entrainé à survivre à un amerrissage en Mer Noire, dans un désert, dans une région froide, en région montagneuse et dans des zones marécageuses. L'équipage doit parvenir à se maintenir en vie durant 24 heures en utilisant le matériel disponible dans le module de descente[38].
Construction et assemblage du vaisseau et de son lanceur
 Le vaisseau Soyouz et le troisième étage au premier plan sont assemblés aux 1er et 2e étages.
Le vaisseau Soyouz et le troisième étage au premier plan sont assemblés aux 1er et 2e étages.Le vaisseau spatial Soyouz et le lanceur sont construits dans des établissements industriels situés en Russie mais ils sont assemblés dans les installations de la base de lancement de Baïkonour situé depuis l'éclatement de l'Union soviétique au Kazakhstan. Baïkonour est, depuis le premier vol du vaisseau Soyouz, le seul cosmodrome équipé pour le lancer : il dispose à cet effet de deux pas de tir. Le premier et le deuxième étage du lanceur, qui sont les plus volumineux du lanceur, sont convoyés par rail depuis l'usine Progress de RKK Energia située dans la ville de Samara au sud-est de la Russie ; ils sont assemblés dans le bâtiment MIK-2B du site 2. Le vaisseau Soyouz est construit par la même entreprise dans un établissement situé dans la ville de Koroliov (ancienne Kaliningrad avant 1996) non loin de Moscou[N 2]. Le vaisseau spatial est préparé pour le vol dans un bâtiment distinct (MIK OK zone 254) de celui affecté au lanceur. Des tests y sont notamment menés dans une chambre anéchoïque pour vérifier le fonctionnement de ses systèmes de télécommunications et de rendez-vous automatique. Environ deux semaines avant le lancement, l'équipage effectue un séjour à Baïkonour pour se familiariser avec le véritable vaisseau avant de retourner s'entrainer à Moscou sur les simulateurs et les maquettes : à cette occasion les cosmonautes pénètrent dans le vaisseau et vérifient les équipements installés. Le vaisseau reçoit ensuite le plein de carburant et de gaz sur un autre site puis est ramené dans le bâtiment initial pour recevoir la coiffe qui doit lui donner un profil aérodynamique et le protéger durant la première phase de vol. Il est ensuite assemblé avec le troisième étage du lanceur (Bloc I). L'ensemble est transporté dans le bâtiment MIK-2B où les deux premiers étages du lanceur ont été préparés et est assemblé avec ceux-ci à l'horizontale. La fusée et le vaisseau sont ensuite placés sur un wagon plat doté d'un système érecteur qui est tiré par une locomotive jusqu'à l'aire de lancement. Arrivé sur le pas de tir, le système érecteur place à la verticale le lanceur qui est alors immobilisé par les bras du système de lancement[39].
Préparatifs
 Bénédiction de l'équipage par un pope avant l'envol
Bénédiction de l'équipage par un pope avant l'envol Cérémonie officielle avant l'envol
Cérémonie officielle avant l'envolL'équipage arrive à Baïkonour environ une semaine avant le lancement. Celui-ci est précédé de certains rituels et cérémonials qui se sont progressivement institutionnalisés au cours de la longue vie du programme Soyouz : ils comprennent notamment la plantation d'un arbrisseau dans la steppe kazakh et la bénédiction solennelle par un pope orthodoxe. Les cosmonautes arrivent sur le pas de tir revêtus de leur tenue Sokol. L'équipage s'installe normalement deux heures avant le lancement alors que le plein d'ergols a déjà été fait (il commence 6 heures avant le lancement). Pour accéder au module de descente, les cosmonautes pénètrent dans le vaisseau via une ouverture pratiquée dans la coiffe de la fusée qui donne sur l'écoutille située sur le flanc du module orbital puis se glissent par l'écoutille interne dans le module de descente situé plus bas. Deux techniciens les assistent en se positionnant dans le module orbital : les cosmonautes pénètrent un par un dans le module orbital avant de se glisser dans leur cabine aidés par les techniciens. Le premier à s'installer est l'ingénieur de vol qui doit vérifier que le module de descente est en état de vol et en particulier que les couchettes de l'équipage sont correctement installées. Une fois ce contrôle effectué, il s'installe sur la couchette de gauche. Le suivant est le passager qui s'installe sur le siège de droite. Enfin le commandant descend à son tour et s'installe dans la couchette centrale. Tandis que les techniciens referment successivement l'écoutille séparant le module de descente et le module orbital, puis l'écoutille latérale du module orbital, l'équipage établit le contact par radio avec le centre de contrôle de Baïkonour[40].
Durant le laps de temps qui précéde le lancement une check-list est passée en revue et la pression interne est périodiquement vérifiée. Trente minutes avant le lancement la tour de service est écartée, la tour de sauvetage est armée et les équipements de survie sont positionnés en mode automatique. A T-40 secondes le lanceur commence à tirer son énergie de ses propres batteries et les cordons ombilicaux sont débranchés, à T-20 secondes les moteurs du premier étage sont lancés. Lorsque la poussée a atteint la valeur nominale, les pinces qui tiennent la fusée la lâchent et celle-ci s'élance[41].
Lancement
 Lancement de Soyouz TMA-3
Lancement de Soyouz TMA-3 L'ingénieur de vol Carl E. Walz dans le module de descente
L'ingénieur de vol Carl E. Walz dans le module de descente Vaisseau Soyouz sur le point de s'amarrer à la station
Vaisseau Soyouz sur le point de s'amarrer à la stationLorsque la fusée a franchi Max Q (pression aérodynamique maximum) à 46 km d'altitude et 115 secondes après le lancement, la tour de sauvetage est larguée puis à 49 km d'altitude et t+165 secondes c'est le tour des 4 propulseurs du premier étage. A 85 km d'altitude, alors que les couches les plus denses de l'atmosphère ont été traversées, la coiffe est à son tour larguée permettant aux astronautes d'observer par les deux hublots de la cabine une pellicule de glace extérieure qui se fragmente et est rapidement emportée par la pression. A t + 288 secondes, le deuxième étage central est à son tour largué et le troisième étage s'allume pour une durée de 238 secondes. Après l'arrêt de celui-ci les astronautes se retrouvent en apesanteur. Le contrôle au sol passe du centre de Baïkonour au centre de contrôle situé à Moscou[42].
Manœuvres orbitales et rendez vous avec la station spatiale
 L'équipage de Soyouz ouvre l'écoutille du module orbital après l'amarrage. On distingue le système d'amarrage sonde-cone
L'équipage de Soyouz ouvre l'écoutille du module orbital après l'amarrage. On distingue le système d'amarrage sonde-coneSi le vol s'est déroulé dans des conditions nominales le vaisseau se trouve sur une orbite basse légèrement elliptique de 240 x 200 km. Durant la première orbite les panneaux solaires et les antennes de télécommunications sont déployés, la pression interne est vérifiée dans les deux modules. Le système de rendez-vous automatique Kours est contrôlé ainsi que les systèmes radio et de contrôle d'attitude. Les cosmonautes retirent leur combinaison spatiale Sokol et l'écoutille qui sépare le module de descente et le module orbital est ouverte[42].
Les manœuvres permettant de rejoindre la station spatiale vont nécessiter 35 orbites donc s'étaler sur près de 48 heures. Théoriquement le rendez-vous pourrait avoir lieu plus rapidement mais cela nécessiterait de consommer une quantité de carburant dont le vaisseau ne dispose pas. Durant cette période les cosmonautes contrôlent et éventuellement corrigent à intervalles réguliers les corrections d'orbite qui sont effectuées par le système pour faire converger les trajectoires du vaisseau et de la station spatiale. Entre deux manœuvres le vaisseau est orienté de manière à ce que l'incidence des rayons solaires soit optimale sur les panneaux solaires puis il est mis en rotation lente (2 °/secondes) autour de son axe de lacet pour maintenir cette position sans avoir à utiliser les moteurs de contrôle d'attitude. Deux périodes de repos sont prévues durant cette période[43]. Pour dormir l'équipage accroche son sac de couchage soit dans le module orbital soit dans le module de descente.
Retour sur Terre
 Le module de descente Soyouz TMA-9 suspendu sous son parachute
Le module de descente Soyouz TMA-9 suspendu sous son parachute Retour de l'expédition 20 avec en arrière plan la capsule et les hélicoptères des équipes de récupération
Retour de l'expédition 20 avec en arrière plan la capsule et les hélicoptères des équipes de récupérationAprès un séjour dans l'espace qui peut durer jusqu'à 6 mois, le vaisseau Soyouz ramène un équipage à Terre. Les préparatifs incluent l'installation des couchettes (l'équipage n'est pas le même que celui du lancement du vaisseau) et leur réglage pour prendre en compte l'allongement du corps des astronautes après leur séjour prolongé en apesanteur. Le retour, lorsqu'il se déroule de manière nominale, dure moins de trois heures trente et l'atterrissage a lieu dans une zone de steppes située au nord de Baïkonour et à mi-distance d'Astana, la capitale du Kazakhstan. La précision des systèmes du vaisseau permet, dans des circonstances normales, d'atterrir à moins de 30 km du point visé.
Départ de la station et séparation du module de descente
L'orbite est modifiée et environ 2 heures 30 après avoir quitté la station spatiale, le vaisseau est retourné à 180 ° et les rétrofusées sont mises à feu suffisamment longtemps pour que le vaisseau réduise son orbite et déclenche le processus de rentrée atmosphérique. Environ une demi-heure après cette manœuvre, le vaisseau pivote de 90 ° de manière à se trouver donc dans une position perpendiculaire à son axe de progression ; l'équipage effectue alors le largage du module orbital puis celui du module de service en déclenchant l'explosion de boulons pyrotechniques. Chaque module va suivre une trajectoire divergente durant son retour vers la Terre sans risque de collision. Le revêtement thermique et la partie extérieure du périscope du module de descente sont également largués. Le vaisseau désormais réduit au seul module de descente est orienté de manière à présenter sa base protégée par le bouclier thermique vers l'avant. Les astronautes font donc désormais face à l'arrière de leur vaisseau. Le module de service contenait l'essentiel de l'avionique du vaisseau et après son largage l'instrumentation du module de descente repose sur un système de guidage et navigation secondaire aux capacités limitées qui est activé pour cette phase et qui utilise l'énergie stockée dans une batterie[44],[45].
Rentrée atmosphérique
L'orientation du module de descente est maintenue de manière à ce que celui-ci ait suffisamment de portance pour limiter la décélération maximale à 4 g. L'angle de rentrée est maintenu par les petits moteurs d'orientation du module de descente qui corrigent si nécessaire l'assiette du vaisseau par de brèves impulsions déclenchées automatiquement par le système de guidage du vaisseau. Le commandant du vaisseau peut reprendre la main et agir lui même sur ces moteurs. Si le système de contrôle d'attitude est défaillant, le vaisseau adopte automatiquement une trajectoire de rentrée dite balistique avec un angle de descente plus abrupt qui fait subir aux astronautes une décélération maximale de 8,5 g ; dans ce scénario le vaisseau se pose environ 400 km avant le point d'atterrissage nominal. A 120 km d'altitude, la densité de l'atmosphère commence à s'accroitre et la température du bouclier thermique s'élève à cause des forces de friction. Les communications radio sont coupées jusqu'à ce que l'altitude de 40 km soit atteinte. Pour les cosmonautes qui ont effectué un séjour prolongé en apesanteur c'est un moment pénible malgré leur entrainement. La décélération culmine lorsque le module de descente se trouve à 30 km d'altitude puis se réduit par la suite. Lorsque l'altitude de 10–12 km est atteinte, la vitesse qui était initialement de 7,8 km/s a été ramenée à 250 m/s. Il ne reste plus que quinze minutes avant l'atterrissage et les moteurs de contrôle d'orientation sont désactivés pour éviter que le carburant corrosif attaque les suspentes des parachutes qui doivent être déployés[45].
Atterrissage
À 10 km d'altitude un capteur de pression déclenche l'éjection du couvercle du compartiment des parachutes. Une paire de petits parachutes extracteurs attachés au couvercle déploient un premier parachute stabilisateur de 24 m2 qui ralentit brutalement la vitesse de 250 m/s à 90 m/s. Au bout de 20 secondes, le parachute principal de plus de 1 000 m² s'extrait à son tour. Il est ligaturé et une fois complètement extrait un cordon détonnant permet son ouverture alors que la capsule est parvenue à une altitude de 5,5 km. Si le déploiement ne s'effectue pas correctement, un parachute de secours d'une superficie de 570 m² est ouvert à une altitude comprise entre 3 et 6 km. Après le déploiement, le module de descente reste suspendu sous le parachute durant un certain temps en faisant un angle de 30 ° par rapport à l'horizontale pour accélérer le refroidissement de la coque portée à l'incandescence puis le vaisseau reprend une position normale, bouclier thermique vers le bas. À une altitude comprise, selon les auteurs, entre 3 et 5,5 km le bouclier thermique est largué ce qui permet de dégager un altimètre qui est activé et les tuyères des fusées qui seront utilisées dans la phase finale de l'atterrissage. La pression de la cabine est égalisée avec la pression extérieure grâce à une valve dont l'ouverture est déclenchée automatiquement. Le parachute principal permet de réduire la vitesse de descente à 8 m/s. Cette vitesse est encore trop élevée ; aussi l'altimètre déclenche, à 1,5 mètre du sol, des rétrofusées qui doivent réduire cette vitesse à 2 ou 3 m/s au moment du contact avec le sol. Le choc est également absorbé par des amortisseurs situés sous la tête des couchettes. L'atterrissage est malgré tout souvent rude : parfois la capsule rebondit plusieurs fois ou se met à rouler entrainée par la pente, ou tirée par son parachute (lorsque le vent souffle) avant de se stabiliser parfois tête bêche. Les cosmonautes déclenchent un dispositif qui désolidarise le parachute du vaisseau pour éviter d'être trainés sur le sol en cas de vent violent[45],[46],[47].
Récupération des cosmonautes
Une unité de récupération, rattachée depuis 2006 au Service Fédéral de la Navigation Aérienne (Rosaeronavigatsia) et dont la création remonte aux débuts de l'astronautique soviétique, est chargée de localiser le vaisseau, récupérer l'équipage et le module de descente et de les évacuer. Elle dispose à cet effet de plusieurs hélicoptères de transport tels que des Mil Mi-8, de véhicules tous-terrains et d'avions. Le contact est pris par radio avec le vaisseau alors que celui-ci est encore en train de descendre au bout de son parachute. Dès que le module de descente a touché terre, les membres de l'équipe de récupération aident les membres de l'équipage, souvent affaiblis par le séjour prolongé en apesanteur, à s'extraire du vaisseau[48],[49].
Lorsque le vaisseau ne se pose pas dans la zone visée, les premiers arrivés sur les lieux, susceptibles d'assister les cosmonautes, peuvent être des personnes déjà présentes sur le site. Des inscriptions en anglais et en russe sont visibles à la fois sur la paroi qui était couverte par le bouclier thermique et à l'intérieur du compartiment de parachutes. Elles informent d'éventuels sauveteurs improvisés qu'ils doivent éviter de se tenir près des tuyères des rétrofusées, qu'un équipage est enfermé à l'intérieur de la capsule et donne de brèves instructions pour ouvrir l'écoutille : des clés sont vissées à l'extérieur pour permettre de démonter l'écoutille [50].
Missions remarquables
Outre les deux missions qui, au début du programme se sont terminées tragiquement, certains vols Soyouz ont connu des péripéties hors normes. À chaque fois les équipages ont survécu démontrant la robustesse du vaisseau.
- Soyouz 18a
Le 5 avril 1975, au cours de la phase propulsée de la mission Soyouz 18a, un dysfonctionnement empêche la séparation complète du deuxième étage après son extinction avec le troisième étage du lanceur. La fusée déséquilibrée dévie rapidement de plus de 10° de sa trajectoire nominale ce qui déclenche automatiquement l'abandon de la mission, l'arrêt du moteur du troisième étage et la séparation du vaisseau Soyouz de son lanceur, puis celle du module de descente des autres modules. A ce moment la vitesse du vaisseau est de 5,5 km par seconde et il se trouve à une altitude de 180 km. Après 400 secondes d'apesanteur, la capsule réalise une rentrée atmosphérique brutale, l'équipage encaissant une décélération de 14 à 15 g avec une pointe à 21,3 g. Le vaisseau va atterrir sans encombre dans les montagnes de Sibérie occidentale à 1 200 mètres d'altitude dans 1,5 mètre de neige alors que 20 minutes plus tôt l'équipage avait quitté Baïkonour où régnait une température de 25 °C. Incertains quant à leur lieu d'atterrissage, les cosmonautes brûlent des documents militaires au cas où ils seraient tombés en Chine, avec laquelle l'Union soviétique est, à l'époque, pratiquement en conflit. Après plusieurs tentatives d'équipes de sauveteurs, dont l'une sera prise dans une avalanche, l'équipage est hélitreuillé sain et sauf 24 heures après son atterrissage. C'est le seul cas de mission habitée interrompue durant la phase d'ascension[51],[52].
- Soyouz 23
Le vaisseau spatial soviétique Soyouz 23 (1976) ne parvient pas à s'amarrer à la station spatiale Saliout 5, un incident qui s'était déjà produit lors d'un vol précédent. Deux jours plus tard, le vaisseau ayant renoncé à sa mission, déclenche sa rentrée dans l'atmosphère pour atterrir dans les steppes du Kazakhstan. Sa trajectoire l'amène malheureusement directement dans le lac Tengiz à moitié gelé, à 2 km de la rive. Il fait nuit et une tempête de neige est en cours. Des court-circuits déclenchent l'éjection du parachute de secours qui vient s'emmêler avec le parachute principal et plaque le vaisseau avec l'écoutille de sortie immergée dans l'eau. L'antenne radio, sous l'eau, est inopérante. Les cloisons internes se couvrent de givre. Les secours tentent à plusieurs reprises d'atteindre la capsule avec des véhicules amphibies mais sans succès; 11 heures après l'atterrissage, un hélicoptère arrive enfin à traîner le vaisseau jusqu'à la rive après que des plongeurs ont cisaillé les suspentes des parachutes. Là, les secours, persuadés que l'équipage est décédé, attendent l'arrivée des croque-morts. L'équipage prend l'initiative d'ouvrir l'écoutille et émerge sain et sauf au grand étonnement de leurs sauveteurs. Valeri Rojdestvenski, un des deux équipiers, était un des rares cosmonautes soviétiques à ne pas être pilote : c'était un ancien commandant d'une unité de plongeurs militaires[53].
- Soyouz T-10-1
Le 26 septembre 1983, peu avant le lancement de Soyouz T-10-1, du carburant se met à fuir à la base de la fusée et prend feu. Le centre de contrôle tente d'activer la tour de sauvetage mais les câbles de contrôle ont déjà brûlé (l'équipage n'a pas les moyens d'activer lui-même le système). Le centre de contrôle parvient 20 secondes plus tard à activer la tour de sauvetage en lançant la commande par radio. Après séparation avec la fusée le vaisseau Soyouz est propulsé durant 5 secondes soumettant ses occupants à une accélération de 14 à 17 g. Quelques instants plus tard le lanceur explose détruisant le pas de tir. Après être monté à une altitude de 650 mètres le parachute se déploie et le vaisseau atterrit à environ 4 km du pas de tir. L'équipage est sain et sauf. C'est le seul cas de mise en œuvre d'une tour de sauvetage que ce soit du côté russe ou américain[10].
- Soyouz TMA-11
 Le module de descente TMA-11 sévèrement brûlé à la suite de sa rentrée balistique
Le module de descente TMA-11 sévèrement brûlé à la suite de sa rentrée balistiqueLe 19 avril 2008 le vaisseau Soyouz TMA-11 ramène à Terre un équipage composé de Iouri Malentchenko et Peggy Whitson qui viennent de passer 6 mois dans la station spatiale internationale dans le cadre de l'expédition 16 ainsi que la coréenne Yi So-yeon. Peu avant la rentrée atmosphérique, la séparation entre le module de descente et celui de service se passe mal. Selon l'analyse réalisée par la suite, certains boulons solidarisant les deux modules n'ont pas été coupés par les charges pyrotechniques[54] ,[55]. Trainant derrière lui le module de service, le module de descente plonge vers la Terre l'écoutille tournée vers l'avant et n'est pas protégé par le bouclier thermique de l'échauffement[56], [57]. L'ordinateur de bord détecte qu'il ne peut faire fonctionner les fusées d'orientation et opte automatiquement pour une rentrée balistique (non contrôlée) qui impose à l'équipage une décélération beaucoup plus sévère. Les instruments indiquent à un moment plus de 8 g selon Peggy Whitson. Le module de service finit par se détacher et le module de descente se retourne naturellement en présentant le bouclier thermique vers l'avant. La suite du vol se déroule de manière nominale. La trajectoire adoptée ayant été plus abrupte que prévu, le module atterrit à 400 km de la zone où il est attendu mais est rapidement rejoint par les équipes chargées de récupérer les cosmonautes. L'écoutille ainsi que l'antenne radio ont été portées à des températures élevées et ont été endommagées.
Les autorités spatiales russes font preuve dans un premier temps d'une grande discrétion sur l'événement. Or des problèmes de séparation se sont déjà produits au cours de vols précédents (Soyouz TMA-1 et Soyouz TMA-10). Yi So-yeon est brièvement hospitalisé après son retour pour des douleurs dorsales liées aux conditions de vol subies. Pour déterminer les causes de l'incident un boulon d'un vaisseau Soyouz amarré à la station est démonté et ramené par le premier vol de retour vers la Terre.
Le tourisme spatial
Sept personnes ont participé à des vols Soyouz à des fins de tourisme, et se sont assises à la place du passager dans un vaisseau Soyouz. l'américain Dennis Tito en 2001, le Sud-Africain Mark Shuttleworth en 2002 qui ont payé chacun approximativement 50 millions de dollars américains et Gregory Olsen en 2005 suivi de l'américaine d'origine iranienne Anousheh Ansari en septembre 2006 qui ont payé à peu près 20 millions de dollars américains en collaboration avec l'agence spatiale russe. En avril 2007, c'est au tour de l'Américain d'origine hongroise Charles Simonyi de rejoindre la Station spatiale internationale à bord d'un Soyouz (Soyouz TMA-10), après avoir conclu un accord de près de 20 millions de dollars américain auprès de la société Space Adventures. Le dernier touriste de l'espace étant Richard Garriott, séjournant 12 jours dans l'espace à bord du vol Soyouz TMA-13 en octobre 2008, moyennant la somme de 30 millions de dollars américains. En septembre 2009 Guy Laliberté président du Cirque du Soleil a été le troisième québécois à effectuer un vol dans l'espace et le tout premier touriste de l'espace canadien.
Vaisseaux dérivés
De nombreux projets de véhicules ont été élaborés à partir du vaisseau Soyouz. Certains de ces vaisseaux ont débouché sur une réalisation et jouent aujourd'hui un rôle important.
Vaisseau-cargo Progress
 Un vaisseau Progress chargé de ravitaillement amarré à la Station spatiale internationale.Article détaillé : Progress.
Un vaisseau Progress chargé de ravitaillement amarré à la Station spatiale internationale.Article détaillé : Progress.Le vaisseau cargo Progress est un véhicule dérivé du vaisseau Soyouz introduit en 1978 pour ravitailler les stations spatiales du programme spatial soviétique. Le vaisseau Soyouz a dès le départ été conçu pour effectuer de manière automatique les manœuvres de rendez-vous et d'amarrage à une station spatiale. Le séjour prolongé dans une station spatiale nécessite le transport de consommables que le vaisseau Soyouz dépourvu de capacité ne peut pas prendre en charge. Les ingénieurs soviétiques se rendirent compte qu'en supprimant les composants du vaisseau liés à la présence d'un équipage humain (tour de sauvetage, bouclier thermique, système de support de vie, on pouvait obtenir une capacité de transport significative. Plusieurs variantes du vaisseau Progress ont été utilisées (Progress M, Progress M1) avec des capacités croissantes. D'une masse de 7 tonnes pour une longueur de 7,9 tonnes le vaisseau Progress peut transporter environ 2,5 tonnes de fret. Sa structure est proche de celle du vaisseau Soyouz. Le module orbital devenu module cargo est rempli avec du fret en vrac (nourriture, bouteilles d'eau ou d'oxygène, pièces détachées, expériences scientifiques) qui est rangé dans des casiers ou solidement arrimé aux cloisons. Le module de descente devenu module réservoir est utilisé pour transporter du carburant qui est transféré à la station spatiale via une tuyauterie qui passe à l'extérieur du module cargo pour éviter toute contamination. Le module de service est prolongé pour recevoir l'électronique qui dans la version Soyouz est installé dans le module de descente. Une fois le transfert du ravitaillement dans la station effectué, l'équipage charge le vaisseau Progress de déchets, puis celui-ci manœuvre de manière à effectuer une rentrée atmosphérique durant laquelle il se désintégre[58].
Vaisseau Shenzhou
Le vaisseau Shenzhou chinois, lancé pour la première fois le 15 octobre 2003, avec Yang Liwei à son bord, est basé sur la technologie du Soyouz.
Le successeur du vaisseau Soyouz
 Maquette du Kliper présenté en 2006.
Maquette du Kliper présenté en 2006. Maquette du PTK remplaçant potentiel du vaisseau Soyouz présentée en 2009.Articles détaillés : Kliper, Crew Space Transportation System et Prospective Piloted Transport System.
Maquette du PTK remplaçant potentiel du vaisseau Soyouz présentée en 2009.Articles détaillés : Kliper, Crew Space Transportation System et Prospective Piloted Transport System.Une refonte importante du vaisseau Soyouz est étudiée par le constructeur du vaisseau RKK Energia à partir de 1995. Les modifications principales de la nouvelle version baptisée Soyouz TMM portent sur l'ordinateur embarqué, le système de télémétrie, les moteurs utilisés pour l'atterrissage. Mais la crise financière que traverse la Russie entraine l'annulation du projet au profit d'une évolution plus modeste baptisée TMS annoncée en 1999. Finalement RKK Energia faute de moyens abandonne également ce projet pour la version TMA lancée pour la première fois en 2002. Une version modernisée du modèle, dit « Soyouz numérique », dont le premier vol est programmé pour mars 2010 (Soyouz TMA-01M)[59].
Avec le retour à une certaine aisance financière, l'agence spatiale russe Roscosmos étudie un remplaçant plus radical du vaisseau dont la conception est pratiquement inchangée depuis sa conception il y a environ 50 ans. La première étude avancée porte sur Kliper un vaisseau spatial de type corps portant réutilisable et effectuant son retour sur Terre en se posant sur une piste d'atterrissage. Le véhicule étudié a une longueur de 10 mètres pour un diamètre de 3 mètres. D'une masse au lancement de 14,5 tonnes il est capable de transporter 2 pilotes et jusqu'à 4 passagers ou, pour la version cargo, 2 pilotes et jusqu'à 700 kg de charge utile. Présenté en 2004 par les responsables russes, le concept évolue vers une version ailée en 2005. Mais le projet très couteux, est abandonné par la suite[60].
L'ACTS est un projet russo-européen aux caractéristiques techniques moins ambitieuses et donc moins couteux. Présenté en 2005 il fait l'objet d'une étude à laquelle l'agence spatiale japonaise participe. L'ACTS est composé initialement d'un module orbital extrapolé à partir du Laboratoire européen Columbus, une capsule de rentrée atmosphérique russe proche de celle du Soyouz éventuellement agrandie pour un équipage de 6 et un module de propulsion européen, qui reprend celui de l'ATV. Cette configuration a ensuite évolué vers une configuration à deux modules : module de rentrée plus module de service. Mais en novembre 2008 l'agence spatiale européenne décide d'abandonner tout investissement dans le vol habité.
En janvier 2009 prenant acte de l'arrêt de la participation européenne, les responsables de l'agence spatiale russe annoncent le lancement d'une étude sur un projet purement national baptisé PPTS. Le nouveau vaisseau d'une masse de 12,7 tonnes comporte un module de service de 5 tonnes et un module de descente de 7 tonnes qui peut transporter jusqu'à 6 passagers en orbite basse. Le projet prévoit également des versions permettant d'atteindre l'orbite basse lunaire avec un équipage plus réduit ou de transporter du fret en orbite basse terrestre[61]. Un cahier des charges est rédigé et un appel d'offres est lancé par l'agence spatiale russe. Des détails sur les caractéristiques du vaisseau sont dévoilés en aout 2009 notamment le fait que l'atterrissage aurait largement recours à des fusées mais aucun vainqueur n'est officiellement désigné. La nouvelle capsule trop lourde pour le lanceur Soyouz devait être mis en orbite par la fusée Rus-M alors en cours de conception[62]. Mais ce projet de lanceur est finalement abandonné le 7 octobre 2011 par l'agence spatiale russe qui veut réduire la part de son budget consacrée aux développements de nouveaux lanceurs[63].
Galerie
-

Écoutille du module de descente (Soyouz T-6).
-

Arrière du module de descente, on aperçoit les sorties des rétrofusées actionnées juste avant l'atterrissage (Soyouz T-6).
Notes et références
Notes
- Au sein de la NASA, dans le cadre du programme Mercury, le même débat a eu lieu et les astronautes, tous anciens pilotes d'essai, réussissent à imposer leur point de vue contre le choix initial des ingénieurs qui portait sur une automatisation poussée.
- Cette ville, rebaptisée du nom du père de l'astronautique russe, abrite également le centre de contrôle des vols habités russes, le TsUP, et est à une trentaine de km de la cité des Etoiles où les cosmonautes s'entrainent.
Références
- Pierre Baland p.102-108
- Pierre Baland p.119-124
- Pierre Baland p.128-129
- Pierre Baland p.137-140
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.89-91
- Pierre Baland p.139-140
- Pierre Baland p.169-173
- Pierre Baland p.188-194
- Pierre Baland p.220-229
- David Portree : Mir Hardware Heritage : Soyuz p. 8
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.137-138
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.139-170
- Pierre Baland p.224-261
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.20-33
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.171-172
- David Portree : Mir Hardware Heritage : Soyuz p. 21
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.173-179
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.179
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.180-237
- What is an Androgynous Peripheral Attach System?, NASA. Consulté le 7 mars 2010
- (fr) Soyouz TM, Encyclopedia Astronautica, 8 mars 2010
- (en) Soyouz TMA, Encyclopedia Astronautica, 7 mars 2010
- Encyclopedia Astronautica : Panaroma des différents types de de vaisseau Soyouz (anglais)
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.391
- (fr) Soyuz, Encyclopedia Astronautica, 6 mars 2010
- (en) Yurii Tiapchenko, « The Integrated Information Display System for the Soyuz-TMA ». Consulté le 13 mars 2010
- (en) “NEPTUN-ME” “SOYUZ-TMA” TRANSPORT SPACECRAFTCOSMONAUT PANEL, FSUE INSTITUTE OF AIRCRAFT EQUIPMENT. Consulté le 13 mars 2010
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.44-45
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.59-60
- (en) Soyuz, NASA. Consulté le 13 mars 2010
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.67-68
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.62-63
- (en) Sven Ghran, « Characteristics of the Soyuz attitude control system ». Consulté le 17 mars 2010
- (en) General design and major onboard systems sur russianspaceweb. Consulté le 17 mars 2010
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.54
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.54-56
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.78-85
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.76-78
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.105-109
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.xxxi-xiii
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.xxxi-xxxiii
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.xxxiii
- (en) Soyuz Orbital Insertion to Docking Timeline, NASA. Consulté le 14 mars 2010
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.xxxiv - xxxv
- (en) Soyuz Landing, NASA. Consulté le 14 mars 2010
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.70-74
- (en) James Oberg, « Consultant Report: Soyuz Landing Safety », 19 mars 1997
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.115-116
- (fr) Nicolas Pillet, « La Direction fédérale des recherches et sauvetages aérospatiaux (FPSU) » sur kosmonavtika.com
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.72 - 74
- David Portree : Mir Hardware Heritage : Soyuz p. 25
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.188 - 192
- David Portree : Mir Hardware Heritage : Soyuz p. 26
- Spaceflight Now — Possible Soyuz separation problem under scrutiny
- Pyrobolt failure caused Soyuz bumpy re-entry - Roscosmos
- [1]
- Soyuz crew was in danger during descent
- R. Hall et D. Shayler : Soyuz A universal Spacecraft p.239 -251
- Nicolas Pillet, « Le Soyouz numérique » sur kosmonavtika.com
- Mark Wade, « Kliper » sur Encyclopedia Astronautica. Consulté le 18 mars 2010
- (en) ACTS/PPTS development during 2008, russianspaceweb
- (en) PPTS development during 2009, russianspaceweb. Consulté le 17 mars 2010
- (en) Roskosmos decides to abandon development of Rus-M booster, Itar-Tass, 7 octobre 2011. Consulté le 22 octobre 2011
Sources
- (en) Rex D. Hall et David J. Shayler, Soyuz A universal Spacecraft, Springer Praxis, 2003 (ISBN 1-85233-657-9)
- Pierre Baland, De Spoutnik à la Lune L'histoire secrète du programme spatial soviétique, Editions Jacqueline Chambon, 2007 (ISBN 978-2-7427-6942-1)
- (en) David S. F. Portree (NASA), Mir Hardware Heritage : Soyuz, 1995 [lire en ligne]
Historique de Soyouz, description des versions et description des missions jusqu'en 1995
- (en) Asif A. Siddiqi (NASA), Challenge To Apollo: The Soviet Union and The Space Race, 1945-1974, University Press of Florida, 2000, 512 p. (ISBN 978-0813026282) [lire en ligne].
Historique du programme spatial soviétique jusqu'à la fin du programme lunaire habité soviétique (1974) (NASA SP-2000-4408)
- (en) Space station assembly : Russian Soyuz TMA Spacecraft, NASA
- (en) Anatoly Zak, « Spacecraft:manned:Soyuz », Russianspaceweb
- (en) Mark Wade, « Soyuz », Encyclopedia Astronautica
Voir aussi
Articles connexes
Liens externes
Catégories :- Capsule spatiale
- Mission Soyouz


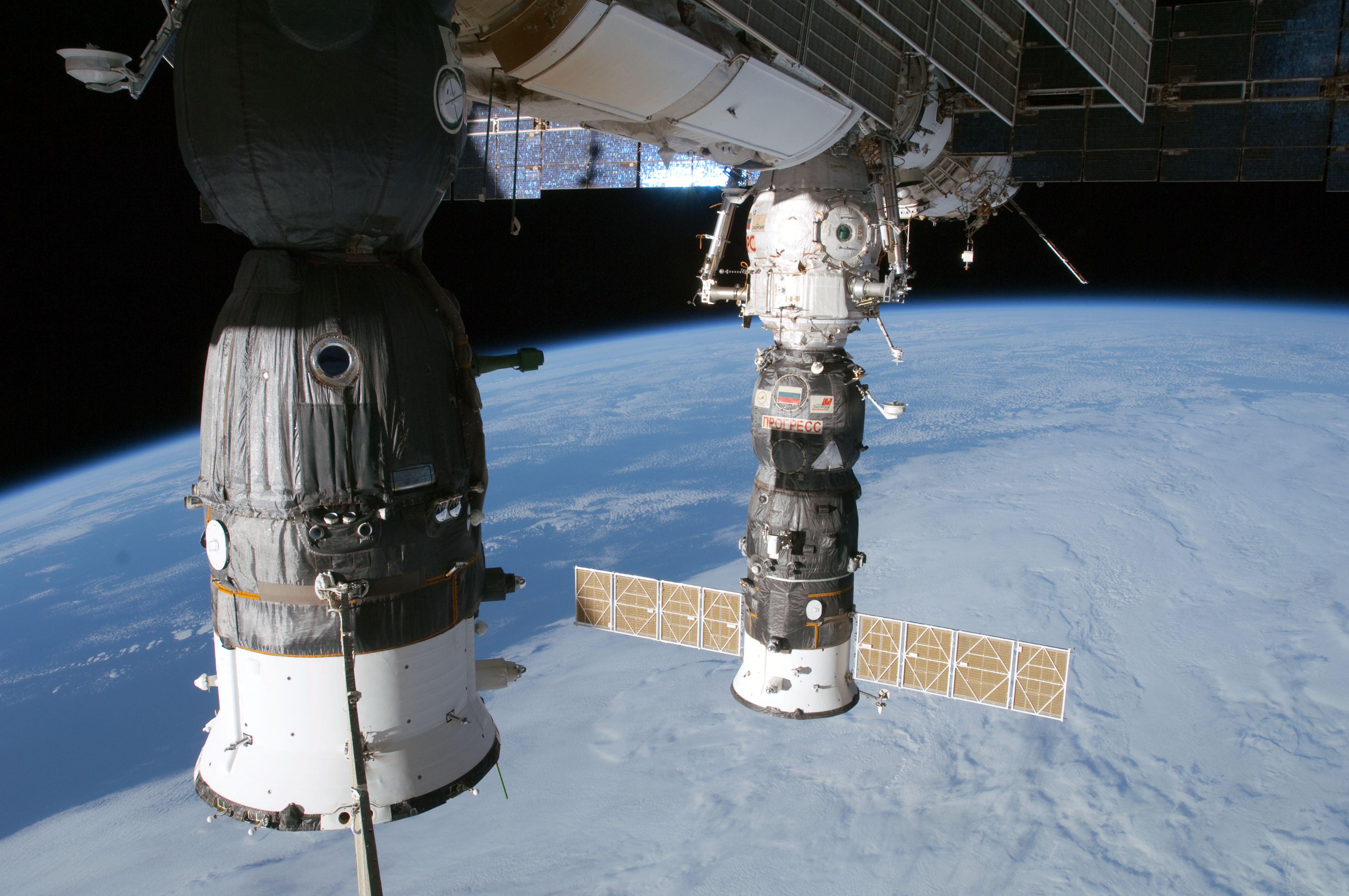



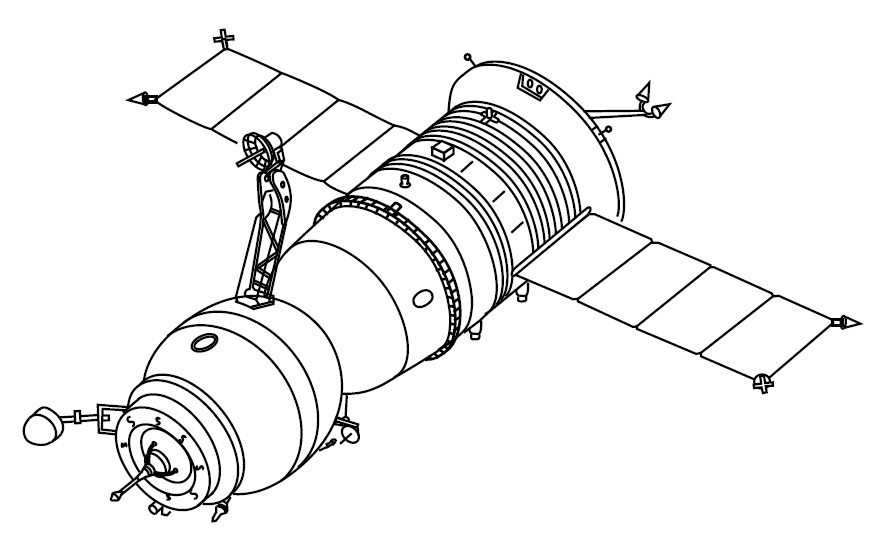
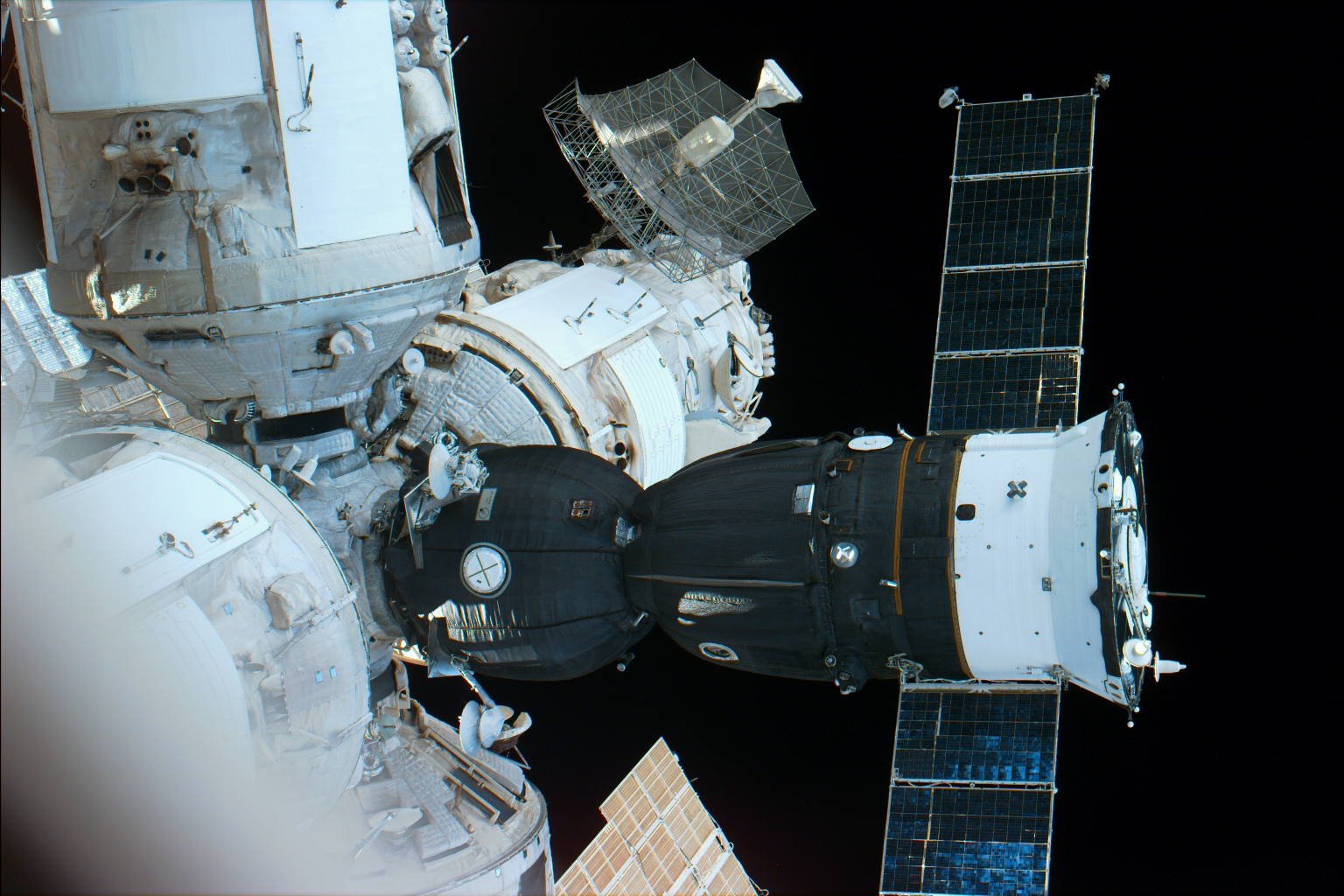
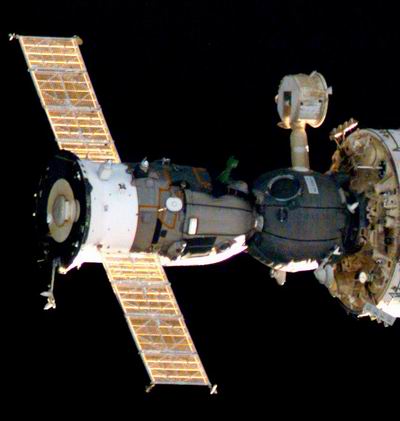
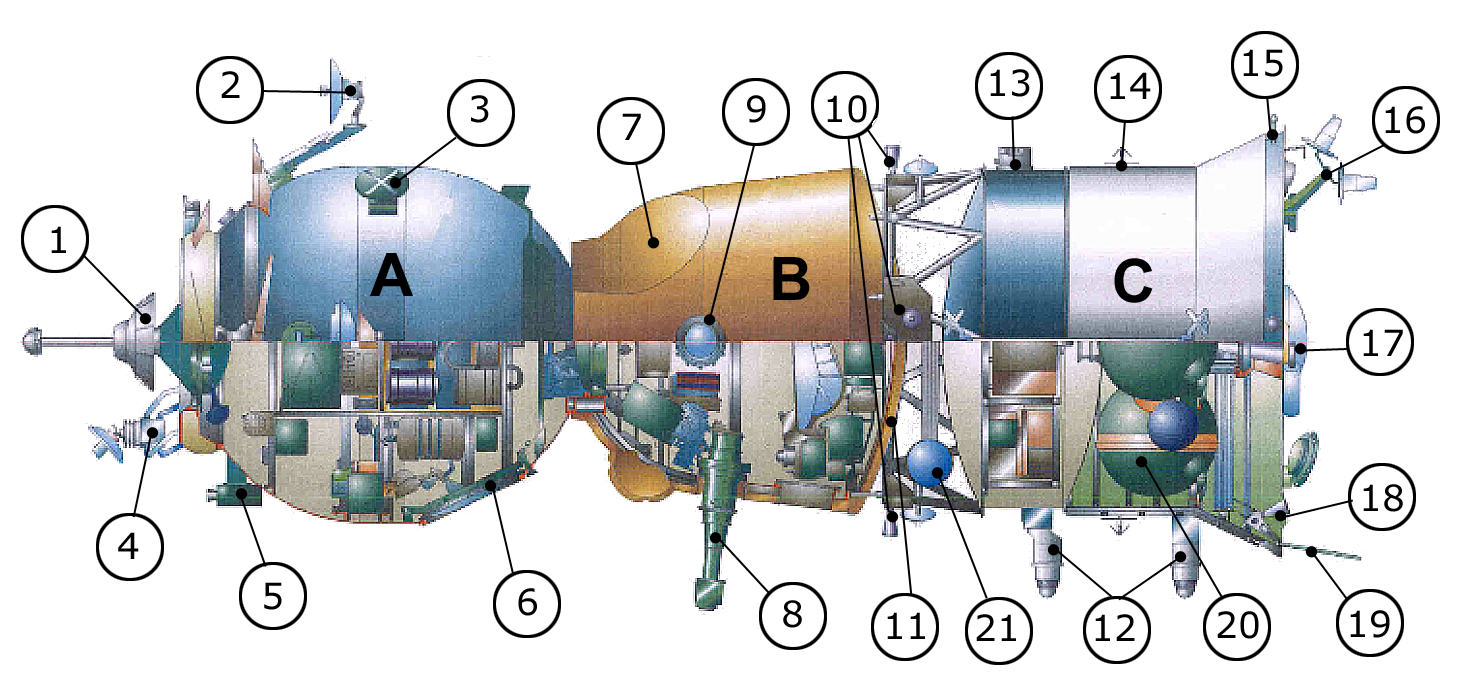


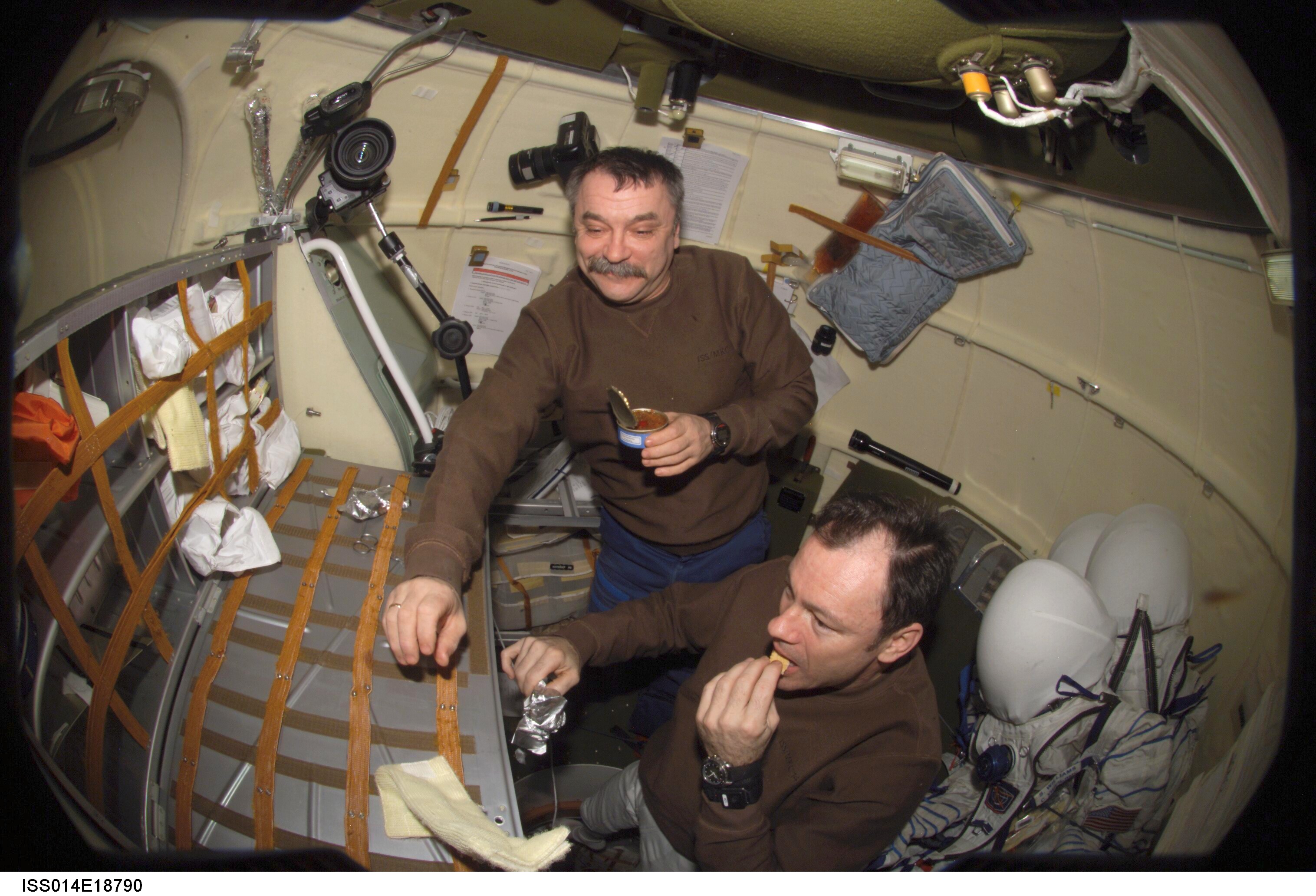
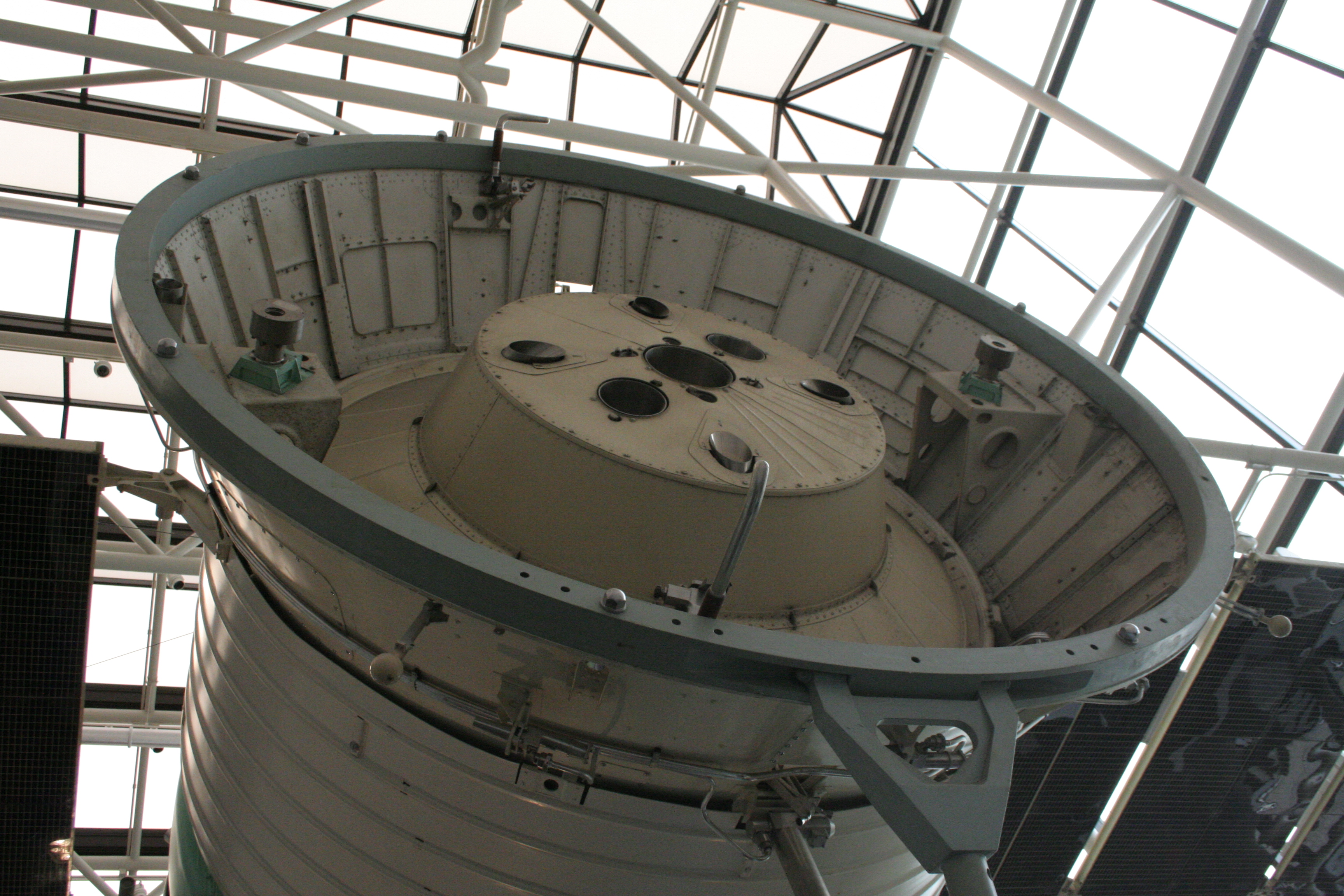















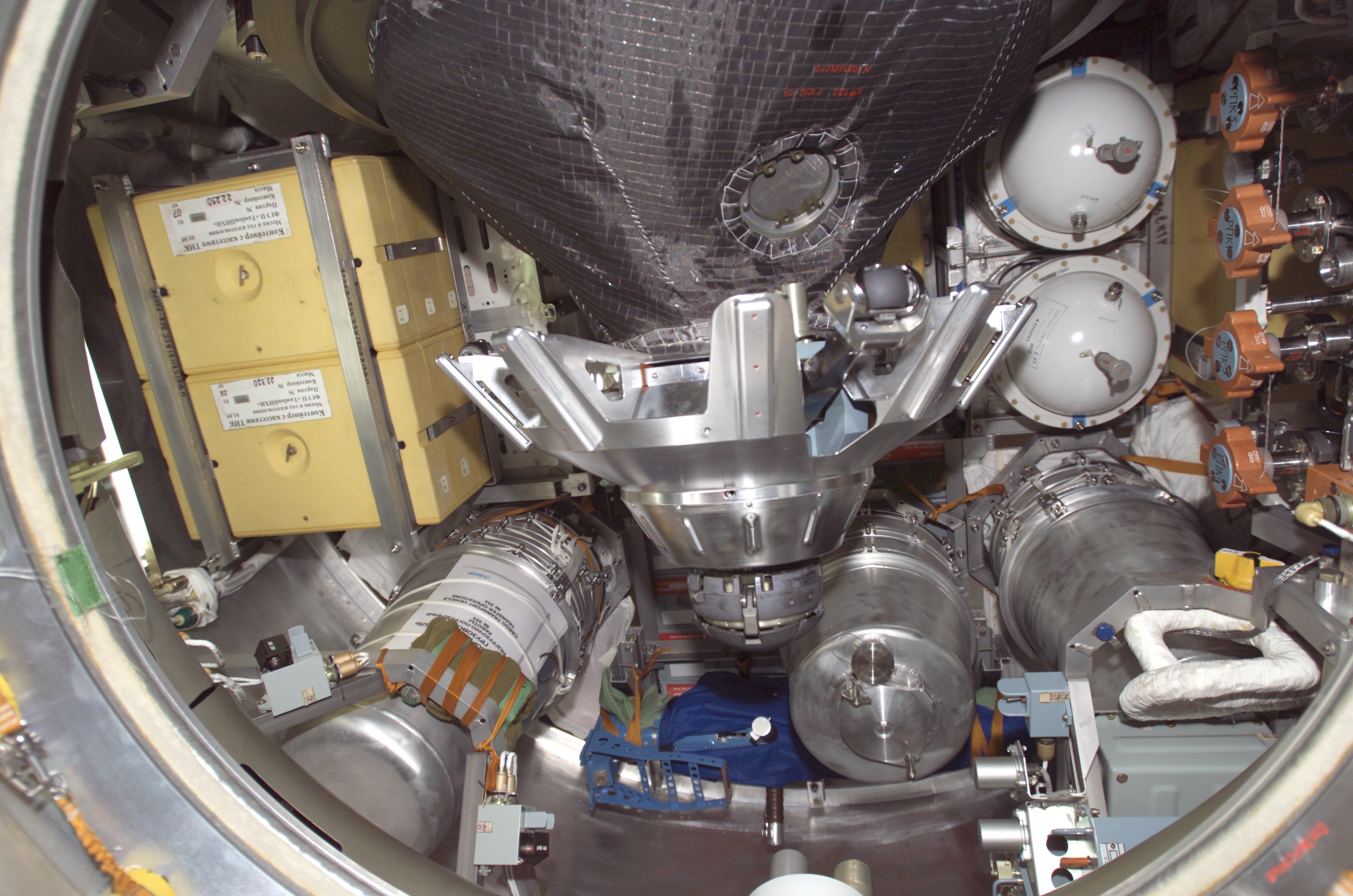

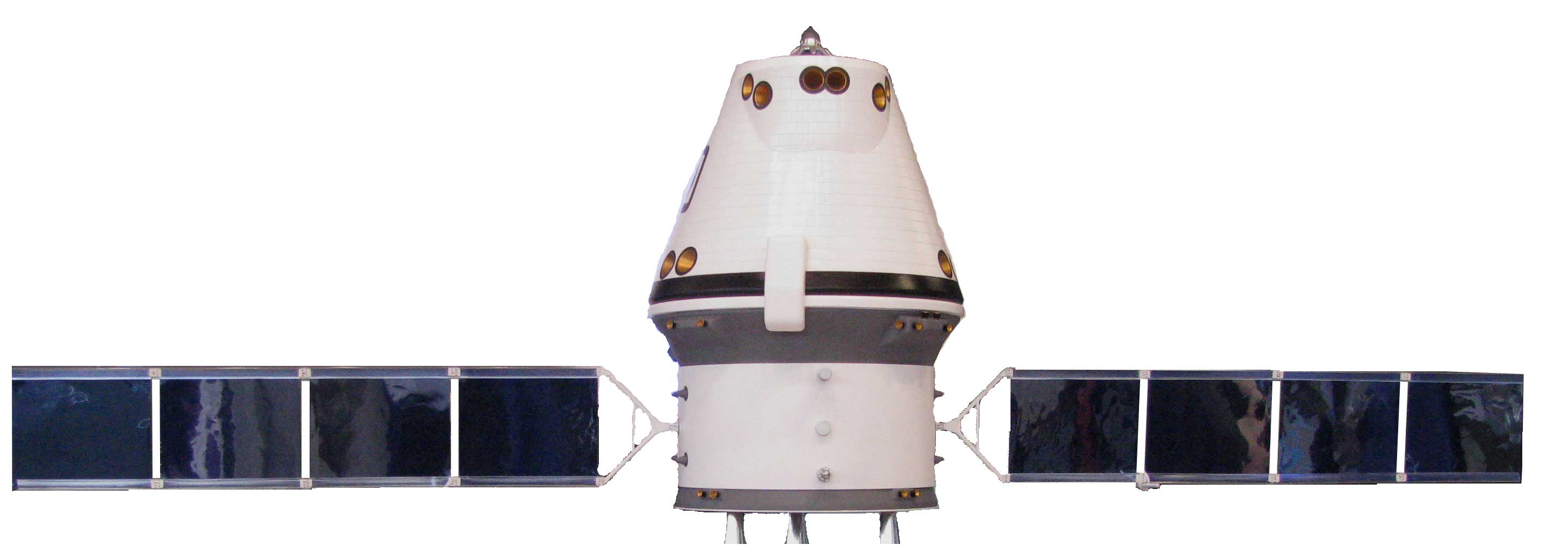


Wikimedia Foundation. 2010.