- Théorème de cauchy-lipschitz
-
Théorème de Cauchy-Lipschitz
 Pour les articles homonymes, voir Cauchy.
Pour les articles homonymes, voir Cauchy. Cauchy développe une première version du théorème de l'article.
Cauchy développe une première version du théorème de l'article.
Le théorème de Cauchy-Lipschitz, en mathématiques, concerne les équations différentielles. Sous des conditions de régularités[Note 1] d'une fonction définissant une équation, il garantit l'unicité d'une solution répondant à une condition initiale dite de Cauchy et l'existence d'une solution maximale.
Selon les auteurs, ce théorème s'exprime de manière plus ou moins forte. Sous une forme plus évoluée, ce théorème assure que la solution varie continûment si la condition initiale est modifiée, et il en est de même si la fonction définissant l'équation dépend continûment d'un paramètre. Si l'équation est définie par une fonction de classe Cp, la solution est de classe Cp+1[Note 2]. Ce théorème existe encore sous des formes plus évoluées si l'équation différentielle n'est plus à valeurs dans un espace vectoriel, mais dans une variété différentielle[Note 3].
Certaines lois physiques, comme le principe fondamental de la dynamique, se traduisent par des équations différentielles vérifiant les hypothèses du théorème. Il assure alors le caractère déterministe du mécanisme décrit par la loi. Ce déterminisme ne se traduit pas toujours par une possibilité de prédiction, la théorie du chaos montre l'existence de possibles phénomènes fortuits.
Une première version est démontrée par Augustin-Louis Cauchy durant la première moitié du XIXe siècle, à l'aide d'une technique d'approximation découverte par Leonhard Euler au siècle précédent. Rudolf Lipschitz généralise l'énoncé en élargissant un peu la classe des équations qui s'y rapportent. Le théorème n'en reste pas moins uniquement un résultat d'existence locale. C'est à la fin de ce siècle que les techniques de démonstration, ainsi que l'énoncé du théorème, sont profondément modifiés. À la suite des travaux de Lazarus Fuchs, les mathématiciens Émile Picard, Paul Painlevé et Henri Poincaré développent une version moderne de l'analyse des équations différentielles. Cette vision permet d'apporter des éléments de réponse sur les solutions maximales, l'unicité et la régularité de la solution. Une version relativement moderne est publiée en 1894 par Ernst Lindelöf. Le théorème se démontre maintenant généralement à l'aide d'un théorème du point fixe et d'une approche topologique, classique en analyse fonctionnelle.
Sommaire
Préambule
Énoncés
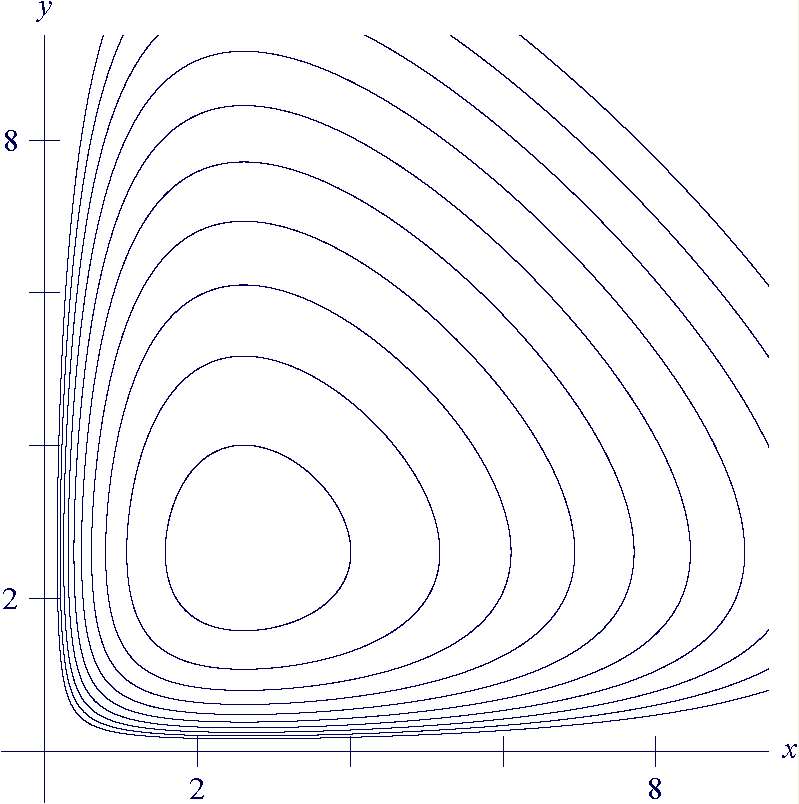
 Les graphes des fonctions d'évolution des populations pour les équations de Lotka-Volterra forment une partition de R+2.
Les graphes des fonctions d'évolution des populations pour les équations de Lotka-Volterra forment une partition de R+2.Dans tout le reste de l'article, E désigne un espace de Banach, Ω un ouvert de RxE et f une fonction continue de Ω dans E. L'objectif est d'étudier l'équation différentielle du premier ordre suivante :
Avec la condition de Cauchy C : x(t0) = x0, où le couple (t0, x0) est un élément de Ω.
Il existe plusieurs manières d'exprimer le théorème de Cauchy-Lipschitz, dont la forme suivante :
- Si la fonction f est localement lipschitzienne par rapport à la deuxième variable, il existe une et une seule solution maximale à l'équation (1) respectant la condition de Cauchy C. Son intervalle de définition est ouvert[1].
Ce théorème dispose des corollaires suivants[2] :
- Sous les mêmes conditions que le théorème, si σ est une solution de l'équation différentielle (1) respectant la condition C et définie sur un intervalle, cet intervalle est inclus dans celui de la solution maximale et la restriction de la solution maximale à cet intervalle est confondue avec σ.
- Les graphes des solutions maximales forment une partition de Ω.
- Si f est une fonction de classe Cp, les solutions sont de classe Cp+1.
L'expression théorème de Cauchy-Lipschitz est aussi utilisée pour désigner d'autres résultats plus évolués. Il est possible de considérer non pas seulement la fonction solution s mais aussi la fonction qui au couple (x, t) associe l'image de t par la solution égale à x à un instant initial t0. On obtient une fonction appelée flot. Si la fonction f est de classe Cp, le flot l'est aussi. Il est aussi possible d'étudier la régularité des solutions si la fonction f dépend d'un paramètre. Ces résultats sont esquissés dans le paragraphe Généralisations et traités plus en profondeur dans l'article Flot (mathématiques).
D'autres résultats, qui ne portent pas le nom de théorème de Cauchy-Lipschitz sont présentés dans le paragraphe : Généralisations.
Déterminisme et chaos
 Henri Poincaré montre que le caractère déterministe d'une équation différentielle vérifiant le théorème de Cauchy-Lipschitz n'empêche pas l'impossibilité de certaines prédictions.
Henri Poincaré montre que le caractère déterministe d'une équation différentielle vérifiant le théorème de Cauchy-Lipschitz n'empêche pas l'impossibilité de certaines prédictions.Pour le mathématicien Vladimir Arnold « Les équations différentielles sont le pivot de la conception scientifique du monde »[3]. En physique, les équations différentielles vérifient de manière très générale les hypothèses du théorème de l'article[Note 4], il en est ainsi de celle qui régit la loi de la gravitation universelle ou l'interaction électromagnétique. Ces équations sont intrinsèquement déterministes et c'est l'une des conséquences du théorème de l'article[4]. Ce déterminisme, c'est-à-dire la capacité de la physique à prévoir, par exemple la trajectoire des planètes, était connu bien avant le théorème. La célèbre citation de Voltaire l'atteste « En apercevant l’ordre, l'artifice prodigieux, les lois mécaniques et géométriques qui règnent dans l’univers, ... je suis saisi d’admiration et de respect. »[5]. Il en déduisait « le chaos est précisément à l'opposé de toutes les lois de la nature. »[5]. Curieusement, les analyses fines de la fin du XIXe siècle démontrent à la fois la pertinence du caractère déterministe de ces lois physiques et réduisent cette idée de Voltaire à l'état de chimère.
Les travaux mathématiques de cette époque montrent effectivement qu'une trajectoire, suivant une loi physique de cette nature, est unique et parfaitement déterminée[Note 5]. En revanche, les études de Poincaré sur la stabilité du système solaire mettent en évidence la faute de raisonnement. Ce mathématicien précise : « Une cause très petite, qui nous échappe, détermine un effet considérable que nous ne pouvons pas ne pas voir, et alors nous disons que cet effet est dû au hasard. Si nous connaissions exactement les lois de la nature et la situation de l'univers à l'instant initial, nous pourrions prédire exactement la situation de ce même univers à un instant ultérieur. Mais, lors même que les lois naturelles n'auraient plus de secret pour nous, nous ne pourrions connaître la situation qu'approximativement. Si cela nous permet de prévoir la situation ultérieure avec la même approximation, c'est tout ce qu'il nous faut, nous disons que le phénomène a été prévu, qu'il est régi par des lois ; mais il n'en est pas toujours ainsi, il peut arriver que de petites différences dans les conditions initiales en engendrent de très grandes dans les phénomènes finals ; une petite erreur sur les premières produirait une erreur énorme sur les derniers. La prédiction devient impossible et nous avons le phénomène fortuit. »[6]
Le théorème de Cauchy-Lipschitz indique bien qu'une prévision parfaite est possible, mais uniquement sous réserve de connaître parfaitement la condition initiale. Certains systèmes dynamiques sont rapidement imprévisibles pour la raison qu'indique Poincaré. On utilise maintenant le terme de chaos pour décrire cette situation. Il ne se produit pas systématiquement, le théorème de Poincaré-Bendixson précise un contexte où il ne peut avoir lieu, mais les hypothèses sont restrictives et le résultat peu généralisable[Note 6].
Vocabulaire
Plusieurs termes ne sont pas nécessairement intuitifs, ce paragraphe propose les définitions[Note 7].
Vocabulaire générique aux équations différentielles
Une partie du vocabulaire utilisée pour exprimer le théorème est générique aux équations différentielles ou fonctionnelles. Le terme espace de Banach[7] désigne un espace vectoriel normé et complet, ce sont des espaces métriques tels toute suite de Cauchy converge. Un exemple simple est un espace vectoriel réel normé de dimension finie. Pour une compréhension plus facile, le lecteur peut imaginer que E désigne l'ensemble des nombres réels. Dans l'article tous les espaces de Banach considérés sont des espaces réels.
Une solution de l'équation est parfois désignée à l'aide de l'expression suivante, que l'on trouve fréquemment dans la littérature traitant du sujet de l'article :
-
- Une courbe intégrale[8] de l'équation (1) est une fonction d'un intervalle de R dans E dont le graphe inclus dans Ω et qui est solution de l'équation (1).
D'une équation différentielle d'ordre n (n > 1) à une équation d'ordre 1
L'équation (1) est dite du premier ordre[9] . Dans le cas général, une équation différentielle d'ordre n est du type[10], si g désigne une fonction définie sur un ouvert de RxEn :

Il peut sembler étonnant de restreindre le théorème uniquement aux équations du premier ordre. En fait, le théorème se généralise aisément à une équation d'ordre n. L'équation (2) peut se lire[11] aussi comme une équation du premier ordre à valeur dans En de variable y(t) = (x1(t),...,xn(t)). L'équation (2) s'écrit encore :

La solution x(t) est alors la première coordonnée de la solution y(t), la kième coordonnée de y(t) correspond à la dérivée (k - 1)ième de la fonction x(t), où k est un entier variant entre 1 et n.
Équation différentielle autonome du premier ordre
Il existe un cas particulier, celui où la fonction f est définie sur un ouvert de E et non pas sur un ouvert de RxE. L'équation (1) s'écrit alors

Ω désigne un ouvert de E et l'équation est dite autonome. Ce cas particulier est étudié pour les démonstrations.
Vocabulaire spécifique
D'autres termes sont plus spécifiquement utilisés dans le contexte du théorème de l'article. L'équation différentielle (1) possède généralement plusieurs solutions. Pour cette raison, on ajoute parfois une condition particulière :
-
- Une condition de Cauchy C est un couple (t0, x0) élément de Ω. Une fonction s définie sur un intervalle de R et à valeurs dans E solution de l'équation (1) vérifie la condition de Cauchy C si, et seulement si, l'intervalle de définition de s contient t0 et s(t0) = x0.
Résoudre le problème de Cauchy[12] consiste à trouver une solution de l'équation (1) vérifiant la condition de Cauchy C. Cette définition est un peu intuitive. Si l'équation différentielle modélise un courant parcourant une étendue d'eau, c'est-à-dire qu'à l'instant t et au point x le courant est égal à f(t,p), il est possible de poser dans l'eau un bouchon à l'instant t0 au point x0, la trajectoire du bouchon est la solution de l'équation. Il existe bien une solution pour chaque couple (t0, x0) (qui peuvent d'ailleurs être confondues).
Une condition de Cauchy ne suffit pas à rendre la solution unique. Considérons l'ensemble S des solutions de l'équation (1) vérifiant la condition de Cauchy C et définies sur un intervalle. Cet ensemble est muni d'une relation d'ordre. Une solution s1 de S est plus petite qu'une solution s2 de S lorsque le domaine de définition de s1 est inclus dans celui de s2.
-
- Une courbe intégrale de S, satisfaisant la condition de Cauchy C, est dite maximale si, et seulement si, elle est définie sur un intervalle et qu'elle est maximale pour la relation d'ordre définie dans ce paragraphe.
Remarque : À la place de l'expression condition de Cauchy, on parle parfois de condition initiale[13]. Les deux expressions sont synonymes.
Le théorème de Cauchy-Peano-Arzelà montre que l'unicité de la solution maximale vérifiant une condition de Cauchy donnée n'est généralement pas garantie. Pour que les hypothèses du théorème soient vérifiées, la fonction f doit aussi posséder une propriété de régularité. Si P(Ω) est la projection canonique sur E de Ω :
-
- La fonction f est dite localement lipschitzienne par rapport à la deuxième variable si, et seulement si, pour tout x de P(Ω), il existe un réel k strictement positif et un voisinage V de x dans P(Ω) tel que :

Exemples et usages
Champ constant
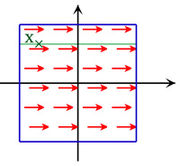
Dans cet exemple[14] E est égal à R2 le plan réel. L'équation différentielle est autonome, elle s'écrit x' = f(x) où f est la fonction constante de valeur le vecteur v de coordonnées (1, 0). Le domaine Ω de la fonction f est l'ensemble des points de R2 est composé des points dont chaque coordonnée est, en valeur absolue, strictement plus petite que 3. Ce domaine est représenté par le carré bleu de la figure de droite. Une méthode de représentation de la fonction f consiste à dessiner les vecteurs f(x), où x est un point du domaine, en plaçant leurs origines au point x.
On recherche les solutions vérifiant la condition de Cauchy (0, x0), ici les coordonnées de x0 sont (-2, 2). Une solution s est de la forme :

La solution ne peut quitter le domaine Ω, en conséquence, la variable t prend nécessairement ses valeurs dans ]-1, 5[. La fonction f est bien continue et k-lipschitzienne en x, avec dans ce cas particulier k = 0. Le théorème de Cauchy-Lipschitz garantit qu'il n'existe qu'une unique courbe intégrale vérifiant une condition de Cauchy précise, comme ici celle donnée par le couple (0, x0). Le graphe de cette solution est représentée en vert sur la figure.
Équation linéaire à coefficients constants
Article détaillé : Équation différentielle linéaire d'ordre deux.On considère encore une équation autonome, dont le domaine est cette fois R tout entier :

Une première difficulté apparaît. Le théorème de Cauchy-Lipschitz ne traite que des équations du premier ordre, c'est-à-dire ne faisant intervenir que la dérivée première et pas la dérivée seconde. En modifiant l'ensemble d'arrivée, il devient possible de transformer cette équation en équation du premier ordre. On considère maintenant l'endomorphisme f de R2, qui à la base canonique (e1, e2) associe (e2, e1). Si v désigne la variable de la nouvelle équation différentielle, elle désigne une fonction de R dans R2 et l'équation s'écrit :

Si l'on note (x(t), y(t)) la fonction variable v(t) la nouvelle équation différentielle s'écrit :

Autrement dit, la dérivée de la fonction x est égale à y et la dérivée de y est égal à x, ce qui signifie que la dérivée seconde de x est égal à x. La nouvelle équation est bien équivalente à l'ancienne. Sous cette nouvelle forme il est possible d'appliquer directement le théorème de l'article. Il indique que la condition de Cauchy s'exprime sous la forme de la valeur de x et de y (autrement dit la dérivée de x) en un point particulier. Le théorème de Cauchy indique qu'il existe une unique solution maximale à l'équation, si l'on fixe une valeur de la fonction x ainsi que sa dérivée. Par exemple, si l'on choisit x(0) = 0 et x' (0) = 2, on trouve l'unique courbe intégrale maximale s définie sur R par :

Étude d'une courbe intégrale
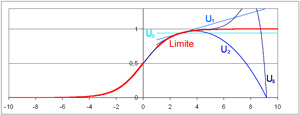
Article détaillé : Fonction logistique (Verhulst).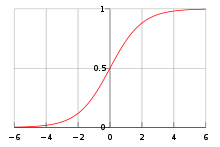 Graphe de la fonction logistique
Graphe de la fonction logistiqueLe théorème de Cauchy-Lipschitz peut être vu comme un outil permettant l'étude d'une courbe intégrale. Illustrons le par l'exemple d'une fonction logistique, définie par l'équation différentielle suivante :

L'équation s'écrit aussi x' = f(x) avec f(x) = x(1 - x). Soit s la solution maximale. La fonction f est une parabole de zéros 0 et 1 et positive entre ses racines. Le théorème de l'article s'applique car f est dérivable donc localement lipschitzienne. Il nous apprend que les valeurs prises par la fonction s ne peuvent quitter l'intervalle ]0, 1[. Toute fonction ayant pour image 1/2 et dépassant 1, passe nécessairement par la valeur 1, d'après le théorème des valeurs intermédiaires. Si une telle fonction était une solution, le point 1 contiendrait deux courbes intégrales : celle là et la fonction constante égale à 1. L'unicité de la solution serait contredite. On peut appliquer le même raisonnement en 0. Le fait que s(t) prenne toutes ses valeurs entre 0 et 1 montre que sa dérivée est strictement positive, la solution s(t) est strictement croissante.
Son domaine de définition est égale à R. En effet, la fonction s est uniformément continue car sa dérivée est bornée, elle peut être prolongée par continuité à l'adhérence de son domaine de définition. Cette prolongation est aussi une solution de l'équation, donc le domaine de définition est un fermé. Le théorème de l'article nous apprend qu'il contient la valeur 0 et qu'il est ouvert. Comme R est connexe et que le seul ouvert fermé non vide d'un connexe est l'ensemble entier, le domaine de définition est égal à R.
La fonction s est strictement croissante est bornée, elle admet une limite en plus l'infini, et donc sa dérivée aussi. La seule valeur limite possible de la dérivée est 0, ce qui montre que la seule limite possible de s(t) est 1. Le même raisonnement montre que la limite en moins l'infini est 0. Enfin, on remarque que la fonction qui à t associe 1 - s(-t) est une solution vérifiant la condition de Cauchy x(0) = 1/2. Le théorème de l'article permet d'en déduire que les deux fonctions sont égales, ce qui signifie que la fonction s(t) - 1/2 est impaire et que la valeur 0 est l'abscisse de l'unique point d'inflexion de la courbe. L'équation montre que la dérivée en 0 est égale à 1/4, ce qui permet d'établir son graphe, représenté à droite.
Dans le cas de l'exemple choisi, on peut résoudre l'équation différentielle[Note 8] et utiliser les méthodes classiques pour l'étude de la courbe intégrale, mais ce n'est pas toujours possible. Une équation différentielle n'a pas nécessairement des solutions s'exprimant sous la forme d'une expression algébrique construite à l'aide des fonctions élémentaires.
Théorème de Poincaré-Bendixson
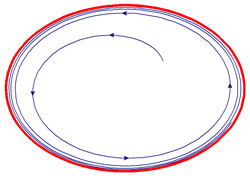
Article détaillé : Théorème de Poincaré-Bendixson.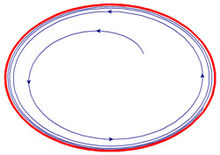 Dans le plan, une équation différentielle autonome du premier ordre converge vers un point ou un cycle limite, à l'image de l'exemple illustré ici.
Dans le plan, une équation différentielle autonome du premier ordre converge vers un point ou un cycle limite, à l'image de l'exemple illustré ici.L'usage du théorème de l'article ne se limite pas à la résolution pratique des équations. Il sert aussi d'outil théorique, par exemple pour mieux comprendre le comportement quantitatif d'une équation différentielle. On peut considérer le cas d'une équation différentielle autonome dans R2 ayant une solution p périodique. La courbe intégrale est un lacet simple, c'est-à-dire que son graphe forme une boucle sans point double. Soit maintenant une condition de Cauchy C correspondant à un point à l'intérieur de la boucle. Le théorème de l'article indique que la courbe intégrale maximale s vérifiant C ne pourra jamais traverser la boucle, si la fonction f définissant l'équation est localement lipschitzienne. La courbe s est donc bornée et si l'on suppose que le domaine de f contient l'intérieur de la boucle, la courbe s ne s'approche jamais trop du bord du domaine. Ceci suffit à démontrer que le domaine de définition de s est R tout entier.
Le théorème de Poincaré-Bendixson permet d'aller plus loin. Il indique que la courbe s est, soit convergente, soit sont comportement s'approche de plus en plus d'une fonction périodique. Cette configuration interdit la théorie du chaos[15].
L'usage fait ici du théorème permet de comprendre qualitativement le comportement d'une courbe intégrale. Pour l'étude d'équation différentielle plus complexe, par exemple certains systèmes dynamiques, cette approche est indispensable. Il n'est en effet plus toujours possible de résoudre explicitement l'équation, ni même d'approximer la solution sur des longues périodes de temps.
Fragments d'histoire
Origines
 Après avoir étudié de nombreux cas particuliers, Euler étudie sous sa forme générale, l'équation différentielle du premier ordre.
Après avoir étudié de nombreux cas particuliers, Euler étudie sous sa forme générale, l'équation différentielle du premier ordre.L'origine de la question traitée par le théorème est ancienne, elle porte initialement le nom de « problème inverse des tangentes »[16]. À chaque point de l'espace, une droite est associée, le problème à résoudre est de trouver la courbe ayant, comme tangente en chaque point, une de ces droites, ce qui correspond en terme moderne à une équation différentielle autonome, de la forme x' = f(x). Kepler est un initiateur de cette question dans une étude sur la contenance d'un tonneau de vin en 1615[17]. Si cette question est abordée par des mathématiciens comme Descartes, Fermat ou Roberval, qui développent cette approche dans des cas particuliers durant le XVIIe siècle, le progrès essentiel est l'œuvre de Newton et Leibnitz avec la découverte du calcul infinitésimal[18]. Newton cherche surtout à obtenir un résultat à l'aide d'une série, Leibnitz recherche aussi des solutions exactes, sous forme de primitives de fonctions connues[19].
Le siècle suivant est l'objet d'une systématisation de l'étude. Dans un premier temps « Des trésors d'ingéniosité ont été dépensés pour ramener à des quadratures d'innombrables équations différentielles particulières et comme l'écrit Paul Painlevé : la vague s'arrêta quand tout ce qui était intégrable, dans les problèmes naturels fût intégré. »[20]. Euler, en 1768 étudie la manière d'approximer une solution[21]. Il étudie le cas particulier x'(t) = f(t) et cherche une solution sur un intervalle [a, b]. Pour se faire, il partitionne l'intervalle à l'aide d'une suite a0 = a, a1, ..., an = b et, si c est élément de l'intervalle [ai, ai+1] il propose l'approximation suivante :

Dans le cas plus général de l'équation x'(t) = f(t, x(t)), il utilise la même méthode, qui donne :

Euler ne se pose pas la question de la convergence si le découpage est de plus en plus fin.
Les apports de Cauchy et de Lipschitz
Augustin Louis Cauchy (1789 - 1857) établit les premiers résultats généraux. Dans un premier temps, il précise sa méthode « Dans mes leçons données à l'École Polytechnique, comme dans la plupart des ouvrages ou mémoires que j'ai publié sur le calcul intégral, j'ai cru devoir renverser cet ordre et placer en premier lieu la recherche, non pas des intégrales générales, mais des particulières; en sorte que la détermination des constantes ou des fonctions arbitraires [pour l'équation aux dérivées partielles] ne fût plus séparée de la recherche des intégrales. »[22]. Ce que Cauchy décrit ici est la démarche formalisée par le problème de Cauchy.
À l'aide de la formalisation de la notion de limite par Bolzano, son approche lui permet d'aller plus loin. La question x' = f(x) sur l'intervalle [a, b], si on lui ajoute la condition de Cauchy x(a) = x0, change de nature. Ce n'est plus la recherche d'une primitive de f, mais le calcul d'une intégrale. Il montre que, avec les notations du paragraphe précédent, si ai+1 - ai tend vers 0 et que f est continue, la limite converge. Cette démarche est appliquée à l'équation x'(t) = f(t, x(t)) dans le cas où f, ainsi que sa différentielle, sont continues et bornées, avec les mêmes conditions, on obtient encore une convergence. C'est la première version du théorème de l'article[23]. En 1835, sa méthode est généralisée aux fonctions holomorphes[24].
Rudolf Lipschitz (1832 - 1903) reprend la même direction que son prédécesseur Cauchy, sans manifestement connaître la teneur de ses travaux. Il ne suppose plus que f possède une différentielle continue et bornée mais uniquement qu'elle vérifie la condition qui porte maintenant son nom[25]. Cauchy utilise dans sa démonstration originale cette même propriété, mais la déduit à l'aide de l'une de ses découvertes, qu'il affectionne particulièrement : le théorème des accroissements finis[26],[Note 9].
Le formalisme moderne
La fin du XIXe siècle voit une profonde mutation du théorème, tant dans la manière de le démontrer que dans l'enrichissement de son contenu, nécessaire pour mieux comprendre l'équation différentielle.
À la suite des travaux de Fuchs[27], les objectifs deviennent plus ambitieux. Paul Painlevé et Emile Picard s'intéressent au cas général des équations différentielles de premier et second ordre et donc à leurs singularités[28],[29]. Les objectifs d'Henri Poincaré sont encore plus généraux, à la suite d'une étude sur la stabilité du système solaire, il cherche à établir une théorie générale qui prendra le nom de système dynamique . Devant l'impossibilité d'établir des solutions explicites, Poincaré fonde les bases d'une théorie qualitative[30]. Les objectifs sont, dans un premier temps l'étude des singularités, puis le comportement asymptotique (c'est-à-dire l'étude du comportement une fois le système stabilisé) et la sensibilité à la condition initiale.
Pour atteindre ces nouveaux objectifs, la formulation par Cauchy ou Lipschitz du théorème devient insuffisante. On cherche maintenant des éléments de réponse globaux sur les courbes intégrales et non plus uniquement un résultat local. Les questions sur la régularité de la solution deviennent essentielles. Enfin, on cherche à déterminer la nature de la modification de la courbe intégrale en fonction d'une modification de la condition initiale ou d'un paramètre de l'équation[31]. Les méthodes pour y arriver diffèrent radicalement de l'approche de Cauchy qui étudiaient le comportement limite de la fonction polygonale imaginée par Euler. Elles se rapprochent de l'analyse fonctionnelle, le contexte de l'étude est maintenant un espace de fonctions disposant de propriétés géométriques. Le théorème à la source de la démonstration est celui du point fixe, sa forme initiale est l'œuvre de Picard[32], ce théorème est maintenant vu comme une propriété générale d'espaces vectoriels particuliers, formalisés par Stefan Banach. Son application au théorème de l'article est l'œuvre du mathématicien finlandais Lindelöf[33] en 1894. Pour cette raison, le théorème nommé en France d'après Cauchy et Lipschitz prend le nom, en langue anglaise de Picard–Lindelöf theorem[34].
Généralisations
Il existe de nombreuses généralisations du théorème de Cauchy-Lipschitz. Les techniques utilisées pour sa démonstration permettent d'aller plus loin dans l'analyse des solutions d'une équation différentielle. Une rapide analyse montre qu'une solution est continument dérivable, mais rien n'indique ce qui se produit si la fonction f est plus régulière. On démontre[35] que si f est de classe Cp, les solutions maximales le sont aussi. La branche des mathématiques étudiant un système dynamique se pose deux questions essentielles : quel est le comportement d'une courbe intégrale si t s'approche des bornes du domaine de définition ? Et quelle est la sensibilité à la condition initiale ? c'est-à-dire que se passe-t-il si x0 subit une petite modification.
Enfin, l'article suppose que l'ensemble E est un espace de Banach, ce qui n'est pas l'unique cas étudié. Dans certaines situations, il est utile de considérer E comme une variété différentielle. Les théorèmes se transposent aisément dans ce nouvel univers[36].
Flot
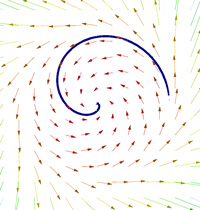
Article détaillé : Flot (mathématiques).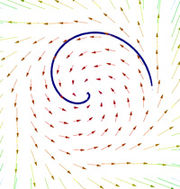 Pour l'étude de la sensibilité initiale, on étudie le flot qui permet d'énoncer une version plus forte du théorème de l'article.
Pour l'étude de la sensibilité initiale, on étudie le flot qui permet d'énoncer une version plus forte du théorème de l'article.L'un des objectifs de l'étude des systèmes dynamiques est celle de la sensibilité à la condition de Cauchy. Le vocabulaire et la représentation géométrique sont un peu différents de ce qui a été utilisé jusqu'à présent. Pour en comprendre l'origine, le plus simple est d'imaginer que Ω est un plan d'eau et que R représente le temps. Le plan d'eau est agité par un courant, représenté par la fonction f, appelé champ de vecteurs. En dimension 2, on représente ce champ de vecteurs en associant à certains points x de E une représentation graphique du vecteur f(x) (si le champ de vecteurs ne dépend pas du temps t), à l'image de la figure de droite. Une courbe intégrale satisfaisant à la condition de Cauchy C peut s'imaginer comme la trajectoire d'un bouchon placé dans l'eau à l'instant t0 à la position x0. Pour connaître d'un seul coup toutes les solutions de l'équation différentielle, il suffit de connaître le mouvement de la surface de l'eau, appelé flot, coulée ou encore courant[37].
Avec ce concept, le théorème de l'article prend une nouvelle forme :
-
- Si f est continue et localement lipschitzienne par rapport à la deuxième variable, le flot est continu, dérivable par rapport à la première variable et localement lipschitzien par rapport à la deuxième.
Il est possible d'aller plus loin si f est plus régulière.
-
- Si f est de classe Cp, le flot l'est aussi.
Cette forme du théorème est plus forte que la précédente. Elle montre la régularité des solutions sous l'action d'une petite modification de la condition de Cauchy. Cet énoncé garantit l'absence d'une certaine forme de chaos. Les bifurcations sont impossibles et, sous réserve que t ne grandisse pas trop, les trajectoires restent proches si la condition de Cauchy est peu modifiée. Néanmoins, si le champ de vecteurs évolue avec le temps ou si E est de dimension strictement supérieure à deux, une autre forme de chaos peut s'installer.
Les formes précises des théorèmes et les démonstrations sont données dans l'article détaillé.
Théorème de Cauchy-Peano-Arzelà
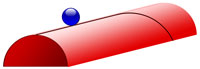
Article détaillé : Théorème de Cauchy-Peano-Arzelà.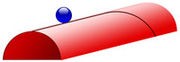 Une bille roulant sur un demi-cylindre.
Une bille roulant sur un demi-cylindre.À la fin du XIXe siècle, Giuseppe Peano, un mathématicien italien, s'interroge sur la pertinence des hypothèses du théorème de Cauchy-Lipschitz[38] Que se passe-t-il, si la fonction f, définissant l'équation (1) reste continue mais n'est pas localement-lipschitzienne par rapport à la deuxième variable ?
Une situation physique correspondant à cette configuration est une bille roulant sur l'arête d'un demi-cylindre, à l'image de la figure de droite. Pour obtenir des calculs plus aisés, on peut considérer un solide glissant sans frottement sur l'arête que forme le sommet d'un toit de pente constante. On obtient une équation différentielle autonome du premier ordre dans R2, si on ne considère que les solutions qui penchent vers les valeurs positives de x :
Si t0 désigne un réel positif, toutes les solutions suivantes vérifient l'équation précédente, pour la même condition de Cauchy, à savoir que le solide est à l'instant 0, à la position (0,0) :

D'autres exemples sont donnés dans l'article détaillé.
Ici, on remarque que si l'unicité n'est plus valable, l'existence reste vraie. De manière plus générale, si la fonction f de l'équation (1) est continue et bornée et si E est de dimension finie, l'existence d'une solution est garantie. Ce résultat est appelé théorème de Cauchy-Peano-Arzelà.
Extension aux équations aux dérivées partielles
La généralisation du théorème pour les équations aux dérivées partielles suppose des hypothèses plus fortes pour un résultat plus faible. La fonction f définissant l'équation doit être analytique ainsi que les conditions aux limites qui remplacent celle de Cauchy. Aucune information n'est fournie dans le cas d'une modification des conditions aux limites ou d'un paramètre. Ce théorème est appelé : théorème de Cauchy-Kowalevski.
Démonstrations
Préambule
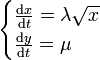
 La suite (u n) converge uniformément sur un intervalle contenant [-5/2, 5/2]. La limite est illustrée en rouge.
La suite (u n) converge uniformément sur un intervalle contenant [-5/2, 5/2]. La limite est illustrée en rouge.Pour comprendre le mécanisme de la preuve, illustrons le sur un cas particulier d'équation différentielle définissant la courbe logistique, avec la condition de Cauchy C :

On définit une suite de fonctions polynomiales (un) par récurrence :
![\forall t \in \mathbb R \quad u_0(t) = \frac 12 \quad\text{et}\quad u_{n+1}(t) = \frac 12 + \int_0^t [u_n(\tau) - u_n^2(\tau)] \,\mathrm d \tau](/pictures/frwiki/56/8394e2d732c17c198926161b66d5ba46.png)
Sur l'intervalle [-5/2, 5/2], la suite (un) converge uniformément. Sa limite est un point fixe de la fonction φ qui à une fonction continue f de [-5/2, 5/2] dans R associe la fonction φf :
![\varphi_f(t) = \frac 12 + \int_0^t [f(\tau) - f^2(\tau)] \,\mathrm d \tau](/pictures/frwiki/99/c6dd6d62640c508be0eefc5d30568c5b.png)
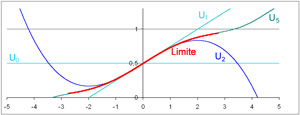
 En réitérant la même méthode, on finit par obtenir une solution maximale.
En réitérant la même méthode, on finit par obtenir une solution maximale.En dérivant l'égalité φu = u, on vérifie que u est bien une solution de l'équation différentielle étudiée et par construction u(0) = 1/2. Cette démarche est celle de la démonstration de Lindelöf. Il constate que si l'intervalle est bien choisi, la fonction φ vérifie la condition de Lipschitz avec un coefficient strictement plus petit que 1, elle est donc contractante, ce qui permet de faire usage du théorème du point fixe. Comme une application contractante n'admet qu'un unique point fixe, l'unicité d'une solution locale est démontrée.
Cette méthode permet de trouver localement une solution. En revanche, pour la valeur 3, la suite (un) diverge. Cependant rien n'empêche de répéter la même démarche avec les deux conditions de Cauchy (5/2, u(5/2)) et (-5/2, u(-5/2)), il devient ainsi possible de prolonger la solution. Quitte à réitérer la démarche une infinité de fois, on finit par obtenir une solution maximale.
L'intérêt de la démarche est surtout théorique. Dans le cas particulier de l'exemple, il est aisé d'intégrer directement l'équation différentielle[Note 10]. Dans le cas général, il existe des méthodes plus rapides pour obtenir une approximation de la solution, comme celle d'Euler décrite dans la partie histoire ou encore celle de Runge-Kutta. En revanche, il est possible de démontrer dans le cadre général du théorème de l'article qu'une fonction construite de la même manière que φ est contractante, ce qui montre l'existence et l'unicité d'un point fixe, solution de l'équation différentielle. Cette démarche, caractéristique de l'analyse fonctionnelle, permet de démontrer un résultat plus fort que celui qu'avait démontré Cauchy.
Solution locale d'une équation différentielle autonome
Au lieu d'attaquer directement le cas général, il est plus simple de considérer uniquement une équation différentielle autonome sans paramètre[39]. Les formulations plus générales du théorème se déduisent de ce cas particulier. Dans ce paragraphe, la fonction f ne dépend pas de la variable t, autrement dit, l'équation (1) s'écrit : x'(t) = f(x(t)) et Ω désigne maintenant un ouvert de E. Si s(t) est une solution, on remarque que l'application qui à t associe s(t + t0) est aussi une solution, si t0 est un réel quelconque. Pour cette raison on peut sans perte de généralité supposer que t0 = 0, ce qui revient à choisir la condition de Cauchy C : x(0) = x0.
L'objectif de ce paragraphe est de montrer que l'équation (1) admet localement une unique solution satisfaisant la condition de Cauchy C. On suppose que f est localement lipschitzienne . Comme Ω est un ouvert, il existe un réel strictement positif a tel que la boule, noté B, fermée de centre x0 et de rayon a soit inclus dans Ω et telle que la restriction à cette boule de la fonction f soit k-lipschitzienne avec k strictement supérieur à 0[Note 11]. Soit m un majorant strictement positif de la norme de f sur B, qui existe car f est k-lipschitzienne sur B. Soit enfin b un entier positif, strictement plus petit que a/m et que 1/k. Ce réel b permet de définir un espace de fonctions sur lequel on construit une application Φ satisfaisant au théorème du point fixe.
Soit Fx0 l'ensemble des fonctions de [-b, b] à valeurs dans B, m-lipschitziennes et dont l'image de 0 soit égale à x0.
-
- Lemme 1 : Munis de la norme de la convergence uniforme, Fx0 est un espace complet.
Il devient maintenant possible de définir de manière générale la fonction Φ. C'est une fonction définie sur Fx0, qui à la fonction u associe la fonction Φu définie par :
![\forall t \in [-b, b] \quad \Phi_u(t) = x_0 + \int_0^t f(u(\tau)) \mathrm d \tau](/pictures/frwiki/52/481a59c807d966f2ebcc6670c25991ee.png)
Deux lemmes sont nécessaire pour pouvoir appliquer le théorème du point fixe :
-
- Lemme 2 : La fonction Φ est à valeurs dans Fx0.
Une application est dite contractante lorsqu'elle est α-lipschitzienne avec α strictement plus petit que 1.
-
- Lemme 3 : La fonction Φ est contractante.
Les hypothèses du théorème du point fixe sont réunies, on en déduit que Φ admet un unique point fixe s dans Fx0. En remarquant que la fonction qui à τ associe f(s(τ)) est continue on en déduit que s est une application continument dérivable et de dérivée égale à f(s(τ)). En dérivant l'égalité définissant Φs, on en déduit l'existence et l'unicité d'une fonction de Fx0 qui vérifie :

Ce qui se résume en un premier théorème :
-
- Théorème : Il existe une unique fonction définie sur ]-b, b[ solution de l'équation (1) et vérifiant la condition de Cauchy C.[Note 12]
Si f est de classe Cp, alors la dérivée de s est la composée de deux applications dérivables et elle est dérivable. De proche en proche, on déduit que la dérivée de s est dérivable p fois car composée de deux applications dérivables p fois. Ceci montre que s est de classe Cp.
Une méthode pratique pour trouver le point fixe est de construire une suite (un) qui vérifie la relation de récurrence : un+1 = Φun, la suite converge nécessairement vers le point fixe. Cette technique est celle utilisée dans le préambule.
Démonstrations des lemmes-
- Munis de la norme de la convergence uniforme, Fx0 est un espace complet :
Pour montrer ce lemme, il suffit de montrer qu'une suite de Cauchy (un) de Fx0 converge vers un élément de Fx0. L'espace des fonctions continues définie sur [-b, b] et à valeurs B est complet car B l'est. La suite (un) admet donc une limite u à valeurs dans B. Comme l'image par u de 0 est égal à x0, car la suite (un(0)) est constante, il suffit de montrer que cette limite est m-Lipschitzienne. Le fait que la suite (un) converge uniformément vers u montre que si ε est un réel strictement positif :

Le fait que toutes les fonctions de Fx0 soient m-lipschitziennes, montre que :

On en déduit, si n est un entier plus grand que N :

La dernière majoration est vraie pour tout ε strictement positif, ce qui montre que la fonction u est bien m-lipschitzienne.
-
- La fonction Φ est à valeurs dans Fx0 :
Soit u une fonction de Fx0, Φu est une fonction à valeurs dans E dont l'image de 0 est égale à x0. Il suffit de montrer qu'elle prend ses valeurs dans B et qu'elle est m-lipschitzienne. Montrons dans un premier temps qu'elle est m-lipschitzienne. Soient t1 et t2 deux éléments de [-b, b], on a :

La dernière majoration montre que Φu est m-lipschitzienne, il reste à montrer qu'elle est à valeurs dans B. Soit t un élément de [-b, b], il faut montrer que Φu(t) est à une distance inférieure ou égale à a de x0 :

Cette dernière majoration montre que Φu est à valeurs dans B et termine la démonstration du lemme.
-
- La fonction Φ est contractante :
Soit u et v deux fonctions de Fx0, déterminons la distance entre leurs deux images par Φ. Soit t un élément de [-b, b] :

Par définition de b, le réel bk est strictement plus petit que 1, ce qui montre le caractère contractant de Φ.
Solution maximale d'une équation différentielle autonome
À l'exception de l'unicité de la solution locale, le paragraphe précédent résume le résultat démontré à l'époque de Cauchy[Note 13]. Il n'offre aucune information sur l'existence ou l'unicité d'une solution globale vérifiant la condition de Cauchy C. Ces résultats, plus tardifs, sont presque une conséquence directe du paragraphe précédent. On peut les résumer de la manière suivante[40], si f est autonome et que t0 = 0 :
-
- Théorème : Il existe une unique solution de l'équation (1), vérifiant la condition C et maximale. Tout autre solution, définie sur un intervalle J, est confondue avec la restriction de la solution maximale sur J et J est inclus dans l'intervalle de définition de la solution maximale.
-
- Proposition : L'intervalle de définition d'une solution maximale est ouvert.
DémonstrationsPour démontrer ces résultats, commençons par un lemme :
-
- Soient deux solutions s1 et s2 de l'équation (1), vérifiant la condition C. Sur l'intersection des deux intervalles de définition, les solutions sont confondues :
Soit In l'intersection des deux intervalles et Ic la partie de In sur laquelle les deux solutions sont confondues. L'objectif est de montrer que l'ensemble Ic est à la fois non vide, ouvert et fermé dans In. Comme In est connexe, Ic est nécessairement égal à In.
L'ensemble Ic contient au moins le point 0, ce qui montre qu'il n'est pas vide. Soit t un point de Ic, le théorème précédent montre qu'il existe un ouvert ]-b, b[, avec b un réel strictement positif, sur lequel il existe une unique solution s de l'équation (1) avec la condition de Cauchy s(t) = s1(t). Sur cet ouvert, les deux solutions sont confondues, ce qui montre que Ic est ouvert. Par ailleurs, Ic est l'image réciproque du fermé {0} par la fonction continue (car dérivable) s1 - s2, c'est donc un fermé. Ic est un ouvert, fermé non vide d'un connexe, il est donc égal à In.
-
- L'intervalle de définition d'une solution maximale est ouvert :
Considérons un point t quelconque d'un intervalle de définition M d'une solution maximale s. Le paragraphe précédent montre qu'il existe un ouvert V contentant t et domaine de définition d'une unique solution sV vérifiant la condition de Cauchy x(t) = s(t)). On en déduit que sur l'intersection de M et de V les solutions s et sV sont confondues. Il est donc possible de prolonger s sur l'ouvert V et comme s est maximale, M contient V.
Tout point t de M contient un voisinage Vt contenu dans M, ce qui montre que M est ouvert.
-
- Il existe une unique solution de l'équation (1), vérifiant la condition C et maximale. Tout autre solution, définie sur un intervalle J, est confondue avec la restriction de la solution maximale sur J et J est inclus dans l'intervalle de définition de la solution maximale.
Considérons l'ensemble des intervalles, domaines de définition de solutions de l'équation (1) et vérifiant la condition C. Soit J1 et J2 deux intervalles maximaux dans cet ensemble. Sur l'intersection des deux intervalles, les solutions sont confondues. Autrement dit, il existe une solution définie sur l'union de J1 et J2, qui est égale à la première solution sur J1 et à la deuxième sur J2 (le fait que J1 et J2 soient ouverts est indispensable pour arriver à cette conclusion). Comme J1 et J2 sont maximaux, ils sont confondus, ce qui montre l'unicité de l'intervalle maximal.
Notons M cet intervalle maximal et J un intervalle de définition d'une solution quelconque. J est inclus dans un intervalle maximal et donc nécessairement dans M car il n'y en a qu'un. La première proposition de cette boite déroulante termine la démonstration.
Équation différentielle non autonome
À l'aide d'un habile jeu d'écriture[41], il est possible de généraliser le cas particulier précédent aux équations dépendantes du temps. On considère maintenant l'équation (1) du théorème, associée à la condition de Cauchy C. Soit g, la fonction de Ω dans l'espace de Banach RxE, définie par :

Si y0 désigne le point de Ω égal à (t0, x0), on considère l'équation différentielle et la condition de Cauchy suivante :

La fonction g est localement lipschitzienne si f l'est. En effet, si y est un élément de Ω, il existe un voisinage V de y et le réel k strictement positif associée à f (qui est localement lipschitzienne par rapport à la deuxième variable) est tel que, si les coordonnées d'un point y1 (resp. y2) de V, sont notées ((t1, x2) (resp. (t2, x2)), on a :

L'énoncé du théorème de l'article ne se déduit pas immédiatement de ce calcul. Le théorème général ne suppose pas que f est localement lipschitzienne, mais uniquement que f continue et localement lipschitzien par rapport à la deuxième variable[42]. En fait, pour se rendre compte que ces hypothèses suffisent, il suffit de remarquer que le caractère lipschitzien n'intervient qu'à deux endroits, dans la démonstration.
Dans un premier temps, il apparaît nécessaire que l'image par g de la boule B soit majorée. Remarquons tout d'abord, avec les notations des paragraphes précédents, que la fonction de [-b, b] dans Ω, qui à t associe ||f(t, x0)|| est continue définie sur un compact et à valeurs dans R+, elle est donc majorée. Soit m1 un tel majorant. Montrons maintenant que g est borné sur B. Soit y égal à (t,x) un point de B :

On dispose donc d'un majorant de la norme de g(y) indépendant de y si y est un élément de B.
Le deuxième endroit de la démonstration où le caractère lipschitzien apparait est celui qui prouve que la fonction φ (maintenant définie à l'aide de la fonction g) est bien contractante. Cette fois ci, Fx0 est l'ensemble des fonctions u1(t) de [-b + t0, b + t0] dans B, qui à t associe (t, u(t)) où u(t) est une fonction m-lipschitzienne, à valeurs dans E et qui vaut x0 en t0. Les mêmes calculs montrent que Fx0 est stable par φ et que φ est bien contractant. Pour montrer que φ est contractant, on considère encore deux fonctions u1 et v1 de Fx0 :

Annexes
Voir Aussi
- Théorème de Cauchy-Peano-Arzelà
- Théorème de Carathéodory
- Critère de Nagumo
Bibliographie
- (fr) J. M. Arnaudiès, Équations différentielles de fonctions de variable réelle ou complexe, Ellipse, 2000 (ISBN 9782729800451)
Ce livre présente une première approche du théorème. Il correspond à un contenu général sur l'équation différentielle, commun à tous les cours de licences sur cette question.
- (fr) Marcel Berger, Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions]
Ce livre présente une approche un peu plus complète. Elle se limite au cas où E est un espace vectoriel de dimension finie, mais va plus loin que la présentation générale car traite aussi de l'équation sous forme de flot et montre la continuité du flot. Cette référence a guidé la construction de l'article de la partie démonstrations de l'article.
- (fr) S. Lang, Analyse Réelle, InterEditions, Paris, 1977 (ISBN 2729600595)
Ce livre est encore un peu plus complet puisque le cas général du Banach est traité, ainsi que le caractère Cp du flot.
- (fr) P. Malliavin, Géométrie différentielle intrinsèque, Hermann, 1972 (ISBN 2705656960)
Cette référence est plus complète, mais plus ardue que la précédente. On y trouve les démonstrations associées au cas où le champ de vecteurs est infiniment différentiable.
- (en) S. Lang, Analysis II, Addison-Wesley Chap, 1969
Cette référence est relativement complète, et d'orientation moins géométrique que la précédente.
- (fr) D. Leborgne, Calcul différentiel et géométrie, Puf, 1982 (ISBN 2130374956)
Ce livre suppose déjà connu le théorème dans le cas des Banach, il le généralise aux variétés différentielles.
- (fr) Lev Pontriaguine, Équations différentielles ordinaires, Moscou, Éditions Mir, 1969; (un des meilleurs livres, en français, sur le sujet avec un exposé trés clair sur l'application de Poincaré (en) utilisée dans la théorie du chaos).
Liens externes
Histoire
- (fr) J. Mawhin, Problème de Cauchy pour les équations différentielles et théorie de l'intégration : influences mutuelles, Cahier du séminaire d'histoire des mathématiques T 9, 1988
- (fr) A. L. Cauchy, Leçons de calcul différentiel et intégral, 26e leçon, pp 385-396
- (fr) E. Picard, G. Simard, Théorie des fonctions algébriques de deux variables indépendantes, Gauthier-Villars, 1900
- (fr) M. E. Lindelöf, Sur l'application de la méthode des approximations successives aux équations différentielles ordinaires du premier ordre, Comptes rendus hebdomadaires des séances de l'Académie des sciences, Vol 114, 1894, pp 454–457
Mathématiques
- (fr) F. Paulin, Théorie de Cauchy-Lipschitz, École Normale Supérieure, pp 228-244
Ce site propose une vision complète de la théorie. Elle est plus générale que l'article car elle traite aussi de l'équation différentielle linéaire et du flot.
- (fr) A. Popier, O. Wintenberger, Équations différentielle, École Polytechnique
Ce site propose une vision plus partielle de la théorie que le site précédent. Seule la régularité de la courbe intégrale est étudiée, celle du flot n'est pas abordée. En revanche, l'hypothèse de la seule continuité de f est étudié, la version de Peano-Arzelà est démontrée.
- (fr) N. Petit, P. Rouchon, Théorème de Cauchy, École des Mines de Paris, p 203
Ce site présente une vision plus simple. La méthode de l'approximation d'Euler est utilisée au détriment de celle du point fixe. Seuls les théorèmes d'existence de solutions intégrales sont traités.
Notes
- ↑ La régularité minimale demandée est la continuité de la fonction et son caractère localement lipschitzien par rapport à la deuxième variable
- ↑ Ceci n'est vrai que si l'équation est explicite, c'est-à-dire si elle est donnée sous la forme x' = f (t, x). Sous une forme implicite comme f (t, x, x' ) = 0, ce résultat tombe en défaut.
- ↑ Cet aspect n'est pas traité dans cet article
- ↑ Il existe des exceptions, l'une est citée en exemple dans cet article
- ↑ Les références sont données dans la partie histoire
- ↑ Les idées de se paragraphe proviennent et sont développées dans : A. D. Dalmedico, J.-L. Chabert, K. Chemla, Chaos et déterminisme, Seuil, 1992 (ISBN 2020151820)
- ↑ Ce paragraphe s'inspire très largement de : Marcel Berger, Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions]
- ↑ Voir l'article détaillé
- ↑ Les paragraphes historiques proviennent essentiellement de la référence : J. Mawhin, Problème de Cauchy pour les équations différentielles et théorie de l'intégration : influences mutuelles, Cahier du séminaire d'histoire des mathématiques T 9, 1988
- ↑ Voir l'article Fonction logistique (Verhulst)
- ↑ Si k est égal à 0, la solution du problème de Cauchy est la fonction qui à t associe (t - t0).f(x0) + x0
- ↑ Cette démonstration est extraite de : Marcel Berger, Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions] p 42 43. Elle est néanmoins un peu modifiée, l'espace E n'est plus supposée de dimension finie.
- ↑ Pas exactement toute fois, car Cauchy avait déjà établi ce résultat pour une équation non autonome
Références
- ↑ On trouve ce résultat ainsi que les différents corollaires dans : Marcel Berger, Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions] pp 42 52
- ↑ H. Cartan, Cours de calcul différentiel, Hermann, 2007 (ISBN 2705667024)
- ↑ Cette citation est extraite de : D. Leborgne, Calcul différentiel et géométrie, Puf, 1982 (ISBN 2130374956) p 218
- ↑ Pour plus de précision, voir : V. Arnold ; Mathematical Methods of Classical Mechanics, Springer-Verlag (2e éd 1989) (ISBN 0387968903)
- ↑ a et b Voltaire, Le philosphe ignorant, Chap XV, p 85 dans Œuvres complètes de Voltaire
- ↑ Extrait de l'introduction de : H. Poincaré ; Calcul des probabilités, Gauthier-Villars (Paris - 2e édition, 1912). Réimpression : Éditions Jacques Gabay (Paris-1987)
- ↑ V. F. Bayart, Espace de Banach, par Bibm@th.net
- ↑ Marcel Berger, Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions] p 40
- ↑ Voir par exemple : C. Antonini, J.-F. Quint P. Borgnat, J. Bérard, E. Lebeau, E. Souche, A. Chateau, O. Teytaud, Équations différentielles d'ordre 1 Par le site mathématiques.net
- ↑ Marcel Berger, Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions] p 37
- ↑ Marcel Berger, Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions] p 38
- ↑ J. Mawhin, Problème de Cauchy pour les équations différentielles et théorie de l'intégration : influences mutuelles, Cahier du séminaire d'histoire des mathématiques T 9, 1988, p 233
- ↑ Marcel Berger, Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions] p 40
- ↑ Il s'inspire du premier exemple donné par 1.2.4 : Marcel Berger, Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions]
- ↑ S. Cantat, Théorème de Poincaré-Bendixson, École Normale Supérieure de Lyon Le journal de maths des élèves, Volume 1, 1995, No. 3
- ↑ J. Mawhin, Problème de Cauchy pour les équations différentielles et théorie de l'intégration : influences mutuelles, Cahier du séminaire d'histoire des mathématiques T 9, 1988, p 231
- ↑ J. Kepler, Nova Stereometria doliorum vinariorum, J. Plancus, 1615
- ↑ Amy Dahan-Dalmedico, Jeanne Peiffer, Une Histoire des mathématiques - Routes et dédales, Seuil, coll. « Points Sciences », 1986 (ISBN 2020092380)[détail des éditions] pp 178-197
- ↑ J. Mawhin, Problème de Cauchy pour les équations différentielles et théorie de l'intégration : influences mutuelles, Cahier du séminaire d'histoire des mathématiques T 9, 1988, p 232
- ↑ J. Mawhin, Problème de Cauchy pour les équations différentielles et théorie de l'intégration : influences mutuelles, Cahier du séminaire d'histoire des mathématiques T 9, 1988, p 232
- ↑ L. Euler, Instutitiones Calculi Integrali, 1768
- ↑ A. L. Cauchy, Note sur la nature des problèmes que présente le calcul intégral., Exercices d'analyse et de physique mathématique : Œuvre de Cauchy, 1840, pp 263 271
- ↑ J. Mawhin, Problème de Cauchy pour les équations différentielles et théorie de l'intégration : influences mutuelles, Cahier du séminaire d'histoire des mathématiques T 9, 1988, p 234
- ↑ J. Mawhin, Problème de Cauchy pour les équations différentielles et théorie de l'intégration : influences mutuelles, Cahier du séminaire d'histoire des mathématiques T 9, 1988, p 235
- ↑ R. Lipschitz, « Disamina della possibilità d'integrare completamente un dato sistema di equazioni differenziali ordinarie », Annali di Matematica Pura ed Applicata 2, 1868-1869, pp 288-302
- ↑ P. Dugac, Histoire du théorème des accroissements finis Archives Internationales d'Histoire des Sciences Oxford, Vol 30, n° 105, 1980, pp 86-101
- ↑ Pour Manheim, les travaux de Fuchs forme un pont entre la vision de Cauchy, Riemann ou Abel de l'équation différentielle et la théorie moderne, découverte par Poincaré, Painlevé et Picard : J H Manheim Dictionary of Scientific Biography 1970-1980 (ISBN 0684101149).
- ↑ P. Painlevé, Leçons sur la théorie analytique des équations différentielles, Hermann, Paris, 1897
- ↑ E. Picard G. Simard Théorie des fonctions algébriques de deux variables indépendantes Gauthier-Villars 1900
- ↑ J. Palis, Une perspective globale pour la dynamique non-conservative, Annales de l'Institut Henri Poincare (C) Non Linear Analysis, 2005, pp 485-507
- ↑ Pour une formulation moderne du théorème, voir : P. Malliavin, Géométrie différentielle intrinsèque, Hermann, 1972, pp 293-301 (ISBN 2705656960)
- ↑ E Picard, Sur l'application des méthodes d'approximations successives à l'étude de certaines équations différentielles ordinaires, Journal de Mathématiques, 1893, p 217
- ↑ M. E. Lindelöf, Sur l'application de la méthode des approximations successives aux équations différentielles ordinaires du premier ordre, Comptes rendus hebdomadaires des séances de l'Académie des sciences, Vol 114, 1894, pp 454–457
- ↑ Voir le théorème I.3.1 : E. A. Coddington N. Levinson, Theory of ordinary differential equations, McGraw-Hill, 1984 (ISBN 0070992568)
- ↑ S. Lang, Analysis II, Addison-Wesley, Chap. 6 § 4, 1969
- ↑ D. Leborgne, Calcul différentiel et géométrie, Puf, 1982, pp 220-230 (ISBN 2130374956)
- ↑ D. Leborgne, Calcul différentiel et géométrie, Puf, 1982, p 228 (ISBN 2130374956)
- ↑ G. Peano, Sull’integrabilità delle equazioni differenziali del primo ordine, Atti Accad. Sci. Torino, 21, 1886, pp 677–685
- ↑ Cette approche, ainsi que ce paragraphe et le suivant sont disponibles dans : J. Onillon Équations différentielle et théorème de Cauchy-Lipschitz par tanopah.com
- ↑ On trouve ces résultats dans : Marcel Berger, Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions] pp 45 et 46
- ↑ Voir : Marcel Berger, Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions] p 49. Attention, cette référence ne traite pas le cas où f est uniquement localement lipschitzienne par rapport à la deuxième variable.
- ↑ On trouve l'étude du théorème à l'aide de ces hypothèses dans : D. J. Mercier, L'épreuve d'exposé au CAPES mathématiques, Volume II Publibook (2006) (ISBN 2748330013) p 354

La version du 20 avril 2009 de cet article a été reconnue comme « bon article », c'est-à-dire qu'elle répond à des critères de qualité concernant le style, la clarté, la pertinence, la citation des sources et l'illustration.  Portail des mathématiques
Portail des mathématiques
Catégories : Bon article | Théorème de mathématiques | Équation différentielle



Wikimedia Foundation. 2010.